W&T Wetenschap & Technologie
Een plek om te discussiëren over wetenschappelijke onderwerpen, wetenschappelijke problemen, technologische projecten en grootse uitvindingen.



Hier weer verder!
En ook een TED filmpje van Catherine Mohr, over de robotische toekomst van chirurgie.
http://www.ted.com/talks/view/id/580
Vorige topics:
Robots
Laatste post:
http://singularityhub.com/2010/03/16/robot-surgery-thy-name-is-davinci/quote:Robot Surgery, Thy Name is DaVinci
March 16th, 2010 by Steven Wasick
It looks like a Star Wars torture device, but the DaVinci is a world class surgical robot.
Robotic surgery is experiencing explosive growth in America’s operating rooms, and the unquestioned industry leader in this field is the DaVinci robot, made by Intuitive Surgical. How pervasive has this robot become? Put it this way, only 14% of prostate surgeries in the US last year took place not using the DaVinci. It has grown from 210 systems seven years ago to 1,395 today. Although typically used for smaller surgeries like prostate removal and hysterectomies, it was recently used for a kidney transplant, and more complicated procedures are expected in the future. The DaVinci is really just the first wave of robotic surgery as technology continues to push clumsy human hands out of the operating room.
[..]
However, the company line on the DaVinci’s effectiveness is far from the last word. According to a large study of Medicare patients, robotic prostate surgery led to fewer in-hospital complications, but had worse results for impotence and incontinence (I know which one of those bullets I’d choose to take, just saying). Costing a cool $1.7 million, plus a $100,000+ annual service fee, inconclusive results are a bit hard to stomach. There are two reasons why this ostensibly advanced surgical method can lead to mixed results. First, the DaVinci provides no tactile feedback. Doctors have to learn to use the visual environment for clues they would otherwise get by feel. Of course, with the development of haptic feedback, this flaw might be remedied soon.
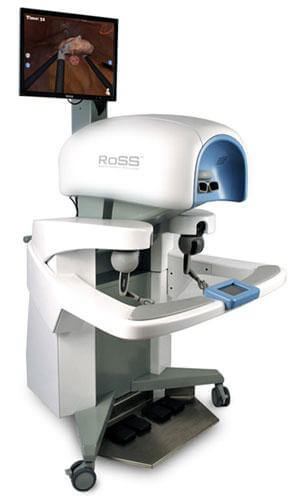
The second problem is that it just takes time to get used to a whole new way of performing surgery. To help with that problem, Simulated Surgical Systems has recently unveiled the RoSS surgical simulator. The simulator is modeled on the DaVinci and allows aspiring robo-surgeons to practice their technique with virtual patients before dealing with the real thing.
This will cost more than an Xbox.
[..]
And while the doctor might currently not be in the room, in the future he may not even be in the country. Way back in 2001 US surgeons used a DaVinci predecessor system to perform a gall bladder surgery in France, via a secured fiber-optic connection. Although this hasn’t seemed to have caught on in regular hospital use, the US military is currently developing “trauma pods” based on a scaled down version of the DaVinci. Front line troops would carry these into battle, allowing doctors to perform complex operations while safely at base.
These systems are pointing us towards the future of surgery, which will use smaller and smaller tools to make operations less invasive, more precise, and more effective. We’re not going to get to nanobot based medicine overnight, but the DaVinci is part of the bridge that will get us there.

En ook een TED filmpje van Catherine Mohr, over de robotische toekomst van chirurgie.
http://www.ted.com/talks/view/id/580
Vorige topics:
Robots
Laatste post:
quote:Op donderdag 11 maart 2010 14:42 schreef distation het volgende:
We staan toch nog zeer ver in de gelijkenis met de mens.
hmm ik weet niet of ik wel wil dat een robot mij opensnijd...als het al moet, dan toch liever een mens van vlees en bloed dan een robot zonder enige moralische en ethische capaciteiten
Volgens gaat het om een robot bestuurt door de mens.
Quote van http://www.ted.com/speakers/catherine_mohr.html:
"Catherine Mohr works on surgical robots and robotic surgical procedures, using robots to make surgery safer -- and to go places where human wrists and eyes simply can't."
Het doel van deze machines, is dat ze je nu juist niet open hoeven te snijden. Maar door piepkleine gaatjes kunnen opereren, met de minimale hoeveelheid schade. Medici kunnen met deze techniek steeds beter bij lastig bereikbare plaatsen. Kortom minder secundaire chirurgie om alleen al op de plaats van bestemming te komen. En ze kunnen preciezer werken. Denk aan sondes die ze in de hersenen aanbrengen, bijvoorbeeld bij epilepsiepatienten. Dat komt op de millimeter aan. Wie vertrouw je dan meer, een mens of robot?
Ze zullen in de toekomst steeds autonomer en complexer worden. Ik juich het toe.
PS: Om hier nu ethiek en moraliteit aan te koppelen, gaat me te ver. Dit zijn nog lang geen kunstmatige breinen met eigen wil. Maar gewoon robots die procedures afwerken.
[ Bericht 7% gewijzigd door Forno op 24-03-2010 10:43:41 ]
Quote van http://www.ted.com/speakers/catherine_mohr.html:
"Catherine Mohr works on surgical robots and robotic surgical procedures, using robots to make surgery safer -- and to go places where human wrists and eyes simply can't."
Het doel van deze machines, is dat ze je nu juist niet open hoeven te snijden. Maar door piepkleine gaatjes kunnen opereren, met de minimale hoeveelheid schade. Medici kunnen met deze techniek steeds beter bij lastig bereikbare plaatsen. Kortom minder secundaire chirurgie om alleen al op de plaats van bestemming te komen. En ze kunnen preciezer werken. Denk aan sondes die ze in de hersenen aanbrengen, bijvoorbeeld bij epilepsiepatienten. Dat komt op de millimeter aan. Wie vertrouw je dan meer, een mens of robot?
Ze zullen in de toekomst steeds autonomer en complexer worden. Ik juich het toe.
PS: Om hier nu ethiek en moraliteit aan te koppelen, gaat me te ver. Dit zijn nog lang geen kunstmatige breinen met eigen wil. Maar gewoon robots die procedures afwerken.
[ Bericht 7% gewijzigd door Forno op 24-03-2010 10:43:41 ]
Laatste artikel uit vorige topic
09-03-2010
Nieuwe robot Kojiro heeft skelet en spieren
Advanced Musculoskeletal Humanoid Robot Kojiro
In Japan hebben wetenschappers van de universiteit van Tokio een robot weer een beetje meer op een mens doen lijken.
Robot Kojiro wordt ondersteund door een licht skelet waarop kunstmatige 'spieren' en 'pezen' zijn bevestigd. Het gaat om motoren en draden die de functies hiervan simuleren.
Door dit systeem is Kojiro veel flexibeler dan vergelijkbare robots zoals concurrent Asimo. Hij gaat nog wel vaak stuk. (sam)
(HLN)
09-03-2010
Nieuwe robot Kojiro heeft skelet en spieren

Advanced Musculoskeletal Humanoid Robot Kojiro
In Japan hebben wetenschappers van de universiteit van Tokio een robot weer een beetje meer op een mens doen lijken.
Robot Kojiro wordt ondersteund door een licht skelet waarop kunstmatige 'spieren' en 'pezen' zijn bevestigd. Het gaat om motoren en draden die de functies hiervan simuleren.
Door dit systeem is Kojiro veel flexibeler dan vergelijkbare robots zoals concurrent Asimo. Hij gaat nog wel vaak stuk. (sam)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Handoek vouwende robot.
Het lijkt van weinig belang maar het is voor robots tot nu toe erg moeilijk gebleken eenvoudige taken als het vouwen van handdoeken of het vullen van een vaatwasser uit te voeren. Dit lijkt me een doorbraak in objectherkenning en handeling.
Het lijkt van weinig belang maar het is voor robots tot nu toe erg moeilijk gebleken eenvoudige taken als het vouwen van handdoeken of het vullen van een vaatwasser uit te voeren. Dit lijkt me een doorbraak in objectherkenning en handeling.

Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Pfff ik betwijfel het. Er zal wel een vision systeem gebruikt zijn alleen je ziet gewoon dat wanneer de root de handdoek oppakt dat hij nog zeker 2x of 3x de handdoek ronddraait. Ook vraag ik me natuurlijk af hoe snel het allemaal ging aangezien het filmpje versneld was.quote:Op zondag 11 april 2010 11:46 schreef Digi2 het volgende:
Handoek vouwende robot.
Het lijkt van weinig belang maar het is voor robots tot nu toe erg moeilijk gebleken eenvoudige taken als het vouwen van handdoeken of het vullen van een vaatwasser uit te voeren. Dit lijkt me een doorbraak in objectherkenning en handeling.

Bovenstaand doet me een beetje denken aan de film Transformers 2 en dan
met name aan die minirobot die in het vliegtuig van de Amerikaanse president
zit,en in een transistor radio kan veranderen.
75 topics = FIN
14-04-2010
Robot naar ruimtestation ISS
Het internationale ruimtestation ISS krijgt er in september een nieuw bemanningslid bij. De Amerikaanse ruimtevaartorganisatie NASA stuurt dan voor het eerst een robot naar het complex. Dat heeft de NASA woensdag (lokale tijd) bekendgemaakt.
De Robonaut 2 of R2 weegt 136 kilo en heeft een hoofd, een romp, twee armen en twee handen. De robot zal voorlopig alleen werkzaamheden uitvoeren in de module Destiny, een Amerikaans laboratorium in het ISS. Bovendien zullen de menselijke collega's van R2 onderzoeken hoe de robot omgaat met gewichtloosheid.
(depers.nl)
Robot naar ruimtestation ISS

Het internationale ruimtestation ISS krijgt er in september een nieuw bemanningslid bij. De Amerikaanse ruimtevaartorganisatie NASA stuurt dan voor het eerst een robot naar het complex. Dat heeft de NASA woensdag (lokale tijd) bekendgemaakt.
De Robonaut 2 of R2 weegt 136 kilo en heeft een hoofd, een romp, twee armen en twee handen. De robot zal voorlopig alleen werkzaamheden uitvoeren in de module Destiny, een Amerikaans laboratorium in het ISS. Bovendien zullen de menselijke collega's van R2 onderzoeken hoe de robot omgaat met gewichtloosheid.
(depers.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
10-05-2010
Robots kunnen mensen dodelijk verwonden
Robots die ingeschakeld worden als hulp bij eenvoudige huishoudtaken, kunnen dodelijke verwondingen toebrengen bij mensen. Dat waarschuwen Duitse wetenschappers tijdens een robotica-beurs in Anchorage, Alaska.
Met de opkomst van domotica en fijner wordende taken die aan machines kunnen worden gedelegeerd, lijkt het futuristische idee van robots die huishoudelijk werk uitvoeren steeds meer binnen handbereik te komen. Kleine reparaties, schoonmaken of eenvoudige maaltijden bereiden zou binnenkort tot de mogelijkheden van de huishoudrobot kunnen behoren.
En hoewel films zoals 'I Robot' - waarin machines zich tegen hun menselijke schepper keren - geen reële bezorgdheid zijn, lopen we volgens een aantal wetenschappers wel degelijk gevaar als we zonder voorzorgen een robot in huis halen.
'Per ongeluk' dodelijk
Een Duits onderzoeksteam van het Instituut voor Robotica en Mechatronica in Wessling zegt dat robots een bedreiging kunnen vormen, zeker indien ze worden uitgerust met scherpe voorwerpen zoals scharen of messen. Het team ging na wat er gebeurt als een robot een scherp voorwerp gebruikt en daarmee per ongeluk een mens raakt.
Men programmeerde een mechanische arm die allerlei voorwerpen vasthield om op 'zachte' substanties in te hakken die op menselijk weefsel lijken. Zo sloeg de robotarm op een bol siliconen, op een stuk varken en zelfs op de arm van een dappere menselijke vrijwilliger. De schade die daarbij werd toegebracht, zou in sommige gevallen dodelijk kunnen zijn, zeggen de researchers.
Veiligheid inbouwen
Het institituut stelt nu voor om robots uit te rusten met een detectiesysteem dat botsingen voorkomt, en zo de kans op verwondingen beduidend verkleint. Het veiligheidsssysteem gebruikt sensors die de robot waarschuwen als hij een 'nieuwe' substantie raakt - bijvoorbeeld de duim van een nieuwsgierige kleuter in plaats van de tomaten die hij aan het fijnhakken is.
Het systeem is het eerste waarmee hakwondes door robots kunnen worden vermeden, iets dat ongetwijfeld niet alleen goed nieuws is voor huishoudens, maar ook voor een aantal industriële toepassingen op de fabrieksvloer. (tw)
(HLN)
Robots kunnen mensen dodelijk verwonden

Robots die ingeschakeld worden als hulp bij eenvoudige huishoudtaken, kunnen dodelijke verwondingen toebrengen bij mensen. Dat waarschuwen Duitse wetenschappers tijdens een robotica-beurs in Anchorage, Alaska.
Met de opkomst van domotica en fijner wordende taken die aan machines kunnen worden gedelegeerd, lijkt het futuristische idee van robots die huishoudelijk werk uitvoeren steeds meer binnen handbereik te komen. Kleine reparaties, schoonmaken of eenvoudige maaltijden bereiden zou binnenkort tot de mogelijkheden van de huishoudrobot kunnen behoren.
En hoewel films zoals 'I Robot' - waarin machines zich tegen hun menselijke schepper keren - geen reële bezorgdheid zijn, lopen we volgens een aantal wetenschappers wel degelijk gevaar als we zonder voorzorgen een robot in huis halen.
'Per ongeluk' dodelijk
Een Duits onderzoeksteam van het Instituut voor Robotica en Mechatronica in Wessling zegt dat robots een bedreiging kunnen vormen, zeker indien ze worden uitgerust met scherpe voorwerpen zoals scharen of messen. Het team ging na wat er gebeurt als een robot een scherp voorwerp gebruikt en daarmee per ongeluk een mens raakt.
Men programmeerde een mechanische arm die allerlei voorwerpen vasthield om op 'zachte' substanties in te hakken die op menselijk weefsel lijken. Zo sloeg de robotarm op een bol siliconen, op een stuk varken en zelfs op de arm van een dappere menselijke vrijwilliger. De schade die daarbij werd toegebracht, zou in sommige gevallen dodelijk kunnen zijn, zeggen de researchers.
Veiligheid inbouwen
Het institituut stelt nu voor om robots uit te rusten met een detectiesysteem dat botsingen voorkomt, en zo de kans op verwondingen beduidend verkleint. Het veiligheidsssysteem gebruikt sensors die de robot waarschuwen als hij een 'nieuwe' substantie raakt - bijvoorbeeld de duim van een nieuwsgierige kleuter in plaats van de tomaten die hij aan het fijnhakken is.
Het systeem is het eerste waarmee hakwondes door robots kunnen worden vermeden, iets dat ongetwijfeld niet alleen goed nieuws is voor huishoudens, maar ook voor een aantal industriële toepassingen op de fabrieksvloer. (tw)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Ah ja DLR werkt veel aan veilige robots met colission detection, heb wel vaker over gelezen. Die test persoon was trouwens de lead researcher op dat gebied zover ik weet. Is ook een keer op discovery geweest.
DNA robots move with purpose
May 12, 2010
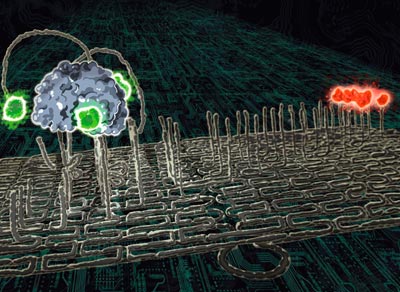
Two independent teams in the US have made DNA robots mimic the protein motors in our bodies – be it walking without help along predefined routes or taking cargo from A to B.
The experiments, which are the first to truly combine advances in our knowledge of DNA structure and dynamics, suggest that nanorobots could soon be performing autonomous, useful tasks.
"A goal of our field is to re-fashion and re-imagine all the complex biomechanical machinery of cells to suit our own purposes," says Paul Rothermund, an expert in molecular robotics at the California Institute of Technology who was not involved in the research. "[We want] to have synthetic molecules that can move around, carry cargo, act as chemical factories...and above all to make these processes modular, to make them engineerable. These two papers mark a significant advance along this research direction."
meer: http://physicsworld.com/cws/article/news/42599
May 12, 2010
Two independent teams in the US have made DNA robots mimic the protein motors in our bodies – be it walking without help along predefined routes or taking cargo from A to B.
The experiments, which are the first to truly combine advances in our knowledge of DNA structure and dynamics, suggest that nanorobots could soon be performing autonomous, useful tasks.
"A goal of our field is to re-fashion and re-imagine all the complex biomechanical machinery of cells to suit our own purposes," says Paul Rothermund, an expert in molecular robotics at the California Institute of Technology who was not involved in the research. "[We want] to have synthetic molecules that can move around, carry cargo, act as chemical factories...and above all to make these processes modular, to make them engineerable. These two papers mark a significant advance along this research direction."
meer: http://physicsworld.com/cws/article/news/42599

Ben afgelopen woensdag trouwens naar het Vision & Robotics event geweest. Erg interessant als je wou weten wat de laatste stand is van vision systemen en industriële robotica en wat men al allemaal kan in de praktijk.
Van de website kun je nog lezingen downloaden.
Andere handige website is http://www.twanetwerk.nl om op de hoogte te blijven.
Ben zelf nu bezig met zoiets als het onderstaande filmpje (is niet diegene waar ik aan werk, maar is hetzelfde alleen dan groter maar moet even vragen of ik een filmpje op youtube mag zetten
maar moet even vragen of ik een filmpje op youtube mag zetten  )
)
Van de website kun je nog lezingen downloaden.
Andere handige website is http://www.twanetwerk.nl om op de hoogte te blijven.
Ben zelf nu bezig met zoiets als het onderstaande filmpje (is niet diegene waar ik aan werk, maar is hetzelfde alleen dan groter

New "Brains" For LittleDog
Technology Review, May 27, 2010
The small four-legged robot LittleDog, from Boston Dynamics, has acquired an impressive array of improved locomotion skills thanks to researchers at the University of Southern California.
Technology Review, May 27, 2010
The small four-legged robot LittleDog, from Boston Dynamics, has acquired an impressive array of improved locomotion skills thanks to researchers at the University of Southern California.

Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
16-06-2010
'Babyrobot moet opgroeien als mens'
AMSTERDAM – Japanse wetenschappers hebben een robot ontworpen die het leerproces van menselijke baby’s moet nabootsen.
De 71 centimeter lange babyrobot met de naam Noby heeft 600 sensoren in zijn lichaam, waarmee hij aanrakingen kan voelen en ook om zich heen kan tasten. In het hoofd van de pop zitten camera’s en microfoons om gehoor en visie te simuleren. Het apparaat wordt aangedreven door een krachtige computer.
De robot is ontworpen door onderzoekers van de Universiteit van Tokyo. Ze willen de elektronische baby menselijk gedrag laten nabootsen om zo theorieën over het leerproces van kinderen te testen. Dat meldt persbureau AFP.
Software
“Je kunt verschillende soorten software laden in de robot en kijken hoe hij vervolgens reageert op acties van mensen om hem heen”, verklaart hoofdonderzoeker Yasuo Kuniyoshi. “Dat gedrag kun je vervolgens vergelijken met het gedrag van echte kinderen.”
Als de robot onnatuurlijk gedrag vertoont, kan de software worden aangepast om een beter model te ontwikkelen van het leerproces van baby's. Op die manier hopen de onderzoekers het opgroeien van jonge kinderen steeds beter te kunnen nabootsen.
Menselijke robots
“Menselijke wezens leren en ontwikkelen verschillende functies als ze opgroeien, maar het exacte mechanisme daarachter is nog niet duidelijk”, aldus Kuniyoshi.
De wetenschappers hopen dat hun project zal leiden tot de ontwikkeling van robots die een menselijk karakter krijgen en goed met mensen kunnen omgaan.
© NU.nl/Dennis Rijnvis
(nu.nl)
'Babyrobot moet opgroeien als mens'
AMSTERDAM – Japanse wetenschappers hebben een robot ontworpen die het leerproces van menselijke baby’s moet nabootsen.
De 71 centimeter lange babyrobot met de naam Noby heeft 600 sensoren in zijn lichaam, waarmee hij aanrakingen kan voelen en ook om zich heen kan tasten. In het hoofd van de pop zitten camera’s en microfoons om gehoor en visie te simuleren. Het apparaat wordt aangedreven door een krachtige computer.
De robot is ontworpen door onderzoekers van de Universiteit van Tokyo. Ze willen de elektronische baby menselijk gedrag laten nabootsen om zo theorieën over het leerproces van kinderen te testen. Dat meldt persbureau AFP.
Software
“Je kunt verschillende soorten software laden in de robot en kijken hoe hij vervolgens reageert op acties van mensen om hem heen”, verklaart hoofdonderzoeker Yasuo Kuniyoshi. “Dat gedrag kun je vervolgens vergelijken met het gedrag van echte kinderen.”
Als de robot onnatuurlijk gedrag vertoont, kan de software worden aangepast om een beter model te ontwikkelen van het leerproces van baby's. Op die manier hopen de onderzoekers het opgroeien van jonge kinderen steeds beter te kunnen nabootsen.
Menselijke robots
“Menselijke wezens leren en ontwikkelen verschillende functies als ze opgroeien, maar het exacte mechanisme daarachter is nog niet duidelijk”, aldus Kuniyoshi.
De wetenschappers hopen dat hun project zal leiden tot de ontwikkeling van robots die een menselijk karakter krijgen en goed met mensen kunnen omgaan.
© NU.nl/Dennis Rijnvis
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

Het wordt bestuurd door een mens.quote:Op woensdag 24 maart 2010 09:50 schreef ptb het volgende:
hmm ik weet niet of ik wel wil dat een robot mij opensnijd...als het al moet, dan toch liever een mens van vlees en bloed dan een robot zonder enige moralische en ethische capaciteiten
Ik heb er zelf ook een keertje mee mogen spelen. Mooiste gadget/apparaat dat ik ooit gebruikt/mee gewerkt heb!
01-08-2010
Japanse robot praat met bejaarden
Japanse wetenschappers hebben een robot op punt gesteld die in staat is om de stem en de gebaren te imiteren die hem toegezonden worden per videofoon. Hij kan bejaarde mensen die alleen wonen gezelschap houden, en hen bijvoorbeeld dingen laten doen.
De zogeheten Telenoïd R1 maakt het bijvoorbeeld mogelijk te laten geloven dat de stem die hij vertolkt, vlakbij is, zo stellen de bedenkers van de robot aan de universiteit van Osaka.
Een sensor in de robot zet de geluiden over die voortgebracht worden door de oproeper, diens hoofdbewegingen, de bewegingen van zijn aangezicht en armen en nog meer van die dingen, aldus de ontwikkelaars. In een demonstratie sprak dezelfde robot met de stem van een arts en vroeg hij aan een bejaarde man hoe die zich de jongste tijd voelde.
De robot zou verkocht worden aan een prijs van 3 miljoen yen (26.500 euro) voor onderzoeksdoeleinden en aan 700.000 yen (6.200 euro) voor algemeen gebruik. (afp/eb)
(HLN)
Japanse robot praat met bejaarden

Japanse wetenschappers hebben een robot op punt gesteld die in staat is om de stem en de gebaren te imiteren die hem toegezonden worden per videofoon. Hij kan bejaarde mensen die alleen wonen gezelschap houden, en hen bijvoorbeeld dingen laten doen.

De zogeheten Telenoïd R1 maakt het bijvoorbeeld mogelijk te laten geloven dat de stem die hij vertolkt, vlakbij is, zo stellen de bedenkers van de robot aan de universiteit van Osaka.
Een sensor in de robot zet de geluiden over die voortgebracht worden door de oproeper, diens hoofdbewegingen, de bewegingen van zijn aangezicht en armen en nog meer van die dingen, aldus de ontwikkelaars. In een demonstratie sprak dezelfde robot met de stem van een arts en vroeg hij aan een bejaarde man hoe die zich de jongste tijd voelde.
De robot zou verkocht worden aan een prijs van 3 miljoen yen (26.500 euro) voor onderzoeksdoeleinden en aan 700.000 yen (6.200 euro) voor algemeen gebruik. (afp/eb)

(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
24-08-2010
Een ruikende robot
Robots moeten kunnen ruiken. Dat vindt althans de Japanse biotechnoloog Shojio Takeuchi. Hij bouwde daarom de eerste elektronische neus ter wereld die evenzogoed kan ruiken als mensen. Bijzonder is dat de neus half machine en half dierlijk is: een kikkerei met draadjes.
In Japan is men al behoorlijk gewend aan het idee van zelfdenkende robots. In talloze films en series die dagelijks op de Japanse televisie komen, draaien zelfdenkende robots al volop mee met het gezin. En ze zijn allesbehalve emotieloos: ze voelen mee met de behoeften van mensen.
Robots hebben pas echt nut als ze zintuiglijk een beetje lijken op mensen. Afbeelding: © FlySi, Flickr.com
Zo’n meevoelende robot moet meer kunnen dan alleen slim zijn, vindt Shoji Takeuchi van de Universiteit van Tokio. Een robot kan ons pas echt goed helpen als hij kan ervaren wat wij ervaren. Ruiken of iets heerlijk geurt of afstotelijk stinkt, is zo’n ervaring. En het is een belangrijke: daarmee bepalen we of ons voedsel veilig is om te eten of niet. Maar zulke goede neuzen hebben mensen nu ook weer niet, dus zou een ruikende robot als hulpje helemaal niet verkeerd zijn.
En daar komt de elektronische neus om de hoek kijken. Eenvoudige elektronische neuzen bestaan al in voedselfabrieken voor kwaliteitscontrole, maar komen qua precisie en menselijkheid niet in de buurt van de neus die Takeuchi deze week beschrijft in Proceedings of the National Academy of Sciences (PNAS).
Takeuchi’s ambitie om neuzen voor robots te bouwen is al vrij opmerkelijk, maar nog opmerkelijker is de elektronische neus zelf. Een samensmelting van machine en biologisch leven: Takeuchi plaatste een onrijp kikkerei dat geuren opvangt in een vloeistofkanaal met glaselektroden. Als het millimetergrote kikkereitje een geur opvangt, reageert het door een stroompje af te geven aan de elektroden.
De geurontvangers zelf zijn eiwitten in de buitenrand van het ei en zijn oorspronkelijk helemaal niet afkomstig van kikkers. Takeuchi plaatste in het ei de genen die verantwoordelijk zijn voor geurontvangers in insectenneuzen – gewoon omdat daarover meer bekend is. Volgens Takeuchi kun je elk gen inbouwen dat je wilt, en dus ook die van geurontvangers in mensen.
Takeuchi’s robothoofd draait wanneer hij lokstoffen van motten ruikt. Afbeelding: © PNAS
Takeuchi is vrij enthousiast over zijn idee van een ruikende robot. Om alvast een beeld te geven van hoe een toekomstige robot gebruik kan maken van zijn nieuwe neus – een klein apparaat van pakweg vijf centimeter groot – plaatste hij het in een menselijk uitziend robothoofd. Telkens wanneer de robot de seksuele lokstoffen van een mot rook, draaide hij zijn hoofd. Nu is het wachten op de robot die zijn hoofd draait bij de geur van appeltaart. Of oude kaas. Of verrot voedsel. Wat je maar wil.
Robots met emoties vindt men in Japan niet vreemd. Maar ze kunnen niets ruiken.
Lees ook
•Kikkerdril met muggenneus (Kennislink)
•Meer over robots op Kennislink
Bron
Nobuo Misawa e.a., Highly sensitive and selective odorant sensor using living cells expressing insect olfactory receptors. PNAS, 23 juli 2010
Meer biotechnologie op Ditisbiotechnologie.nl
(Kennislink)
Een ruikende robot
Robots moeten kunnen ruiken. Dat vindt althans de Japanse biotechnoloog Shojio Takeuchi. Hij bouwde daarom de eerste elektronische neus ter wereld die evenzogoed kan ruiken als mensen. Bijzonder is dat de neus half machine en half dierlijk is: een kikkerei met draadjes.
In Japan is men al behoorlijk gewend aan het idee van zelfdenkende robots. In talloze films en series die dagelijks op de Japanse televisie komen, draaien zelfdenkende robots al volop mee met het gezin. En ze zijn allesbehalve emotieloos: ze voelen mee met de behoeften van mensen.

Robots hebben pas echt nut als ze zintuiglijk een beetje lijken op mensen. Afbeelding: © FlySi, Flickr.com
Zo’n meevoelende robot moet meer kunnen dan alleen slim zijn, vindt Shoji Takeuchi van de Universiteit van Tokio. Een robot kan ons pas echt goed helpen als hij kan ervaren wat wij ervaren. Ruiken of iets heerlijk geurt of afstotelijk stinkt, is zo’n ervaring. En het is een belangrijke: daarmee bepalen we of ons voedsel veilig is om te eten of niet. Maar zulke goede neuzen hebben mensen nu ook weer niet, dus zou een ruikende robot als hulpje helemaal niet verkeerd zijn.
En daar komt de elektronische neus om de hoek kijken. Eenvoudige elektronische neuzen bestaan al in voedselfabrieken voor kwaliteitscontrole, maar komen qua precisie en menselijkheid niet in de buurt van de neus die Takeuchi deze week beschrijft in Proceedings of the National Academy of Sciences (PNAS).
Takeuchi’s ambitie om neuzen voor robots te bouwen is al vrij opmerkelijk, maar nog opmerkelijker is de elektronische neus zelf. Een samensmelting van machine en biologisch leven: Takeuchi plaatste een onrijp kikkerei dat geuren opvangt in een vloeistofkanaal met glaselektroden. Als het millimetergrote kikkereitje een geur opvangt, reageert het door een stroompje af te geven aan de elektroden.
De geurontvangers zelf zijn eiwitten in de buitenrand van het ei en zijn oorspronkelijk helemaal niet afkomstig van kikkers. Takeuchi plaatste in het ei de genen die verantwoordelijk zijn voor geurontvangers in insectenneuzen – gewoon omdat daarover meer bekend is. Volgens Takeuchi kun je elk gen inbouwen dat je wilt, en dus ook die van geurontvangers in mensen.

Takeuchi’s robothoofd draait wanneer hij lokstoffen van motten ruikt. Afbeelding: © PNAS
Takeuchi is vrij enthousiast over zijn idee van een ruikende robot. Om alvast een beeld te geven van hoe een toekomstige robot gebruik kan maken van zijn nieuwe neus – een klein apparaat van pakweg vijf centimeter groot – plaatste hij het in een menselijk uitziend robothoofd. Telkens wanneer de robot de seksuele lokstoffen van een mot rook, draaide hij zijn hoofd. Nu is het wachten op de robot die zijn hoofd draait bij de geur van appeltaart. Of oude kaas. Of verrot voedsel. Wat je maar wil.
Robots met emoties vindt men in Japan niet vreemd. Maar ze kunnen niets ruiken.

Lees ook
•Kikkerdril met muggenneus (Kennislink)
•Meer over robots op Kennislink
Bron
Nobuo Misawa e.a., Highly sensitive and selective odorant sensor using living cells expressing insect olfactory receptors. PNAS, 23 juli 2010
Meer biotechnologie op Ditisbiotechnologie.nl
(Kennislink)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
31-08-2010
De nieuwe ster van NASA is praatvaar Robonaut 2
Hij lijkt wat op The Stig maar rijdt met een heel andere bolide: een ruimteschip! Gas geven zou ook wat moeilijk zijn voor Robonaut 2 - R2 voor de vrienden - want benen kreeg hij niet van zijn scheppers, ingenieurs van NASA. R2 zal in november de eerste robot zijn die de ruimte wordt ingeschoten. En hij blijkt een praatvaar te zijn.
Robonaut 2 zal mee het International Space Station (ISS) bevolken en taken uitvoeren die voor gewone astronauten "te gevaarlijk of te saai" zijn. R2 heeft armen, handen en vingers maar dus geen benen. Die heeft hij nog te goed en er wordt aan gewerkt. Maar R2 blijkt vooral ook een eigen karaktertje te hebben.
De voorbije maand hield hij fans op Facebook en Twitter up-to-date over zijn aanstaande ruimtetrip. De man die R2's berichten de wereld instuurt is Joe Bibby van NASA. Die communicatieve taak neemt tot enkele uren per dag in beslag. R2 heeft dan ook heel wat fans.
"We krijgen alle soorten vragen", zegt Bibby aan news.com.au. Van 'Ben jij familie van HAL 9000' tot meer technische kwesties als 'Op welk besturingssysteem werk jij?'" Bibby laat nog weten dat een heel team ingenieurs drie jaar lang werkte aan de creatie van R2. (jv)
(HLN)
De nieuwe ster van NASA is praatvaar Robonaut 2

Hij lijkt wat op The Stig maar rijdt met een heel andere bolide: een ruimteschip! Gas geven zou ook wat moeilijk zijn voor Robonaut 2 - R2 voor de vrienden - want benen kreeg hij niet van zijn scheppers, ingenieurs van NASA. R2 zal in november de eerste robot zijn die de ruimte wordt ingeschoten. En hij blijkt een praatvaar te zijn.
Robonaut 2 zal mee het International Space Station (ISS) bevolken en taken uitvoeren die voor gewone astronauten "te gevaarlijk of te saai" zijn. R2 heeft armen, handen en vingers maar dus geen benen. Die heeft hij nog te goed en er wordt aan gewerkt. Maar R2 blijkt vooral ook een eigen karaktertje te hebben.
De voorbije maand hield hij fans op Facebook en Twitter up-to-date over zijn aanstaande ruimtetrip. De man die R2's berichten de wereld instuurt is Joe Bibby van NASA. Die communicatieve taak neemt tot enkele uren per dag in beslag. R2 heeft dan ook heel wat fans.
"We krijgen alle soorten vragen", zegt Bibby aan news.com.au. Van 'Ben jij familie van HAL 9000' tot meer technische kwesties als 'Op welk besturingssysteem werk jij?'" Bibby laat nog weten dat een heel team ingenieurs drie jaar lang werkte aan de creatie van R2. (jv)







(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
13-09-2010
Wetenschappers leren robot liegen en bedriegen
AMSTERDAM – Amerikaanse onderzoekers zijn er in geslaagd om een robot te creëren die in staat is om achtervolgers te misleiden.
De wetenschappers van het Georgia Institute of Technology hebben een robot geleerd om valse sporen achter te laten bij een spelletje verstoppertje. Het apparaat is in staat om andere robots op die manier te misleiden.
Het onderzoek toont aan dat robots mogelijk zo kunnen worden geprogrammeerd dat ze in het geval van een conflict in staat zijn om tegenstanders te bedriegen. Dat schrijven de onderzoekers in het wetenschappelijk tijdschrift International Journal of Social Robotics.
Schadelijk
De wetenschappers beweren dat het creeëren van bedriegende robots niet schadelijk is voor mensen, maar juist erg nuttig kan zijn. “Er zijn veel situaties waarin mensen elkaar bedriegen om de ander uiteindelijk te helpen”, verklaart hoofdonderzoeker Alan Wagner in het tijdschrift Sciencemag.org.
“Als ik bijvoorbeeld probeer om een persoon met Alzheimer zijn medicijnen te laten innemen, kunnen we tijdelijk een conflict hebben. Maar uiteindelijk is het toch beter voor hem als ik er voor zorg dat hij zijn medicijnen inneemt.”
Merkstift
De wetenschappers testten een robot die was geprogrammeerd om te liegen door het apparaat verstoppertje te laten spelen met een andere robot. Het wagentje met een camera aan boord moest steeds kiezen uit drie compartimenten waarin hij zich kon verschuilen voor de zoekende robot.
Voor de ingang van elke verstopplek stond echter een merkstift. Het wagentjes stootte deze hindernis steeds om, zodat hij zijn schuilplaats verraadde.
Misleiden
Na een aantal pogingen begon de robot zijn tegenstander echter te bedriegen. Hij stootte nu steeds een merkstift om voor een compartiment, waarna hij naar binnen reed in een andere schuilplaats. Op deze manier slaagde de liegende robot er in 75 procent van alle gevallen in om de zoekende robot te misleiden
(zie filmpje).
De zoekende robot was overigens niet op de hoogte van het feit dat de andere robot in staat was om te bedriegen. Volgens de wetenschappers zal het veel moeilijker zijn om een robot te vervaardigen die slimmere tegenstanders kan misleiden.
© NU.nl/Dennis Rijnvis
(nu.nl)
[ Bericht 2% gewijzigd door ExperimentalFrentalMental op 14-09-2010 16:46:50 ]
Wetenschappers leren robot liegen en bedriegen
AMSTERDAM – Amerikaanse onderzoekers zijn er in geslaagd om een robot te creëren die in staat is om achtervolgers te misleiden.
De wetenschappers van het Georgia Institute of Technology hebben een robot geleerd om valse sporen achter te laten bij een spelletje verstoppertje. Het apparaat is in staat om andere robots op die manier te misleiden.
Het onderzoek toont aan dat robots mogelijk zo kunnen worden geprogrammeerd dat ze in het geval van een conflict in staat zijn om tegenstanders te bedriegen. Dat schrijven de onderzoekers in het wetenschappelijk tijdschrift International Journal of Social Robotics.
Schadelijk
De wetenschappers beweren dat het creeëren van bedriegende robots niet schadelijk is voor mensen, maar juist erg nuttig kan zijn. “Er zijn veel situaties waarin mensen elkaar bedriegen om de ander uiteindelijk te helpen”, verklaart hoofdonderzoeker Alan Wagner in het tijdschrift Sciencemag.org.
“Als ik bijvoorbeeld probeer om een persoon met Alzheimer zijn medicijnen te laten innemen, kunnen we tijdelijk een conflict hebben. Maar uiteindelijk is het toch beter voor hem als ik er voor zorg dat hij zijn medicijnen inneemt.”
Merkstift
De wetenschappers testten een robot die was geprogrammeerd om te liegen door het apparaat verstoppertje te laten spelen met een andere robot. Het wagentje met een camera aan boord moest steeds kiezen uit drie compartimenten waarin hij zich kon verschuilen voor de zoekende robot.
Voor de ingang van elke verstopplek stond echter een merkstift. Het wagentjes stootte deze hindernis steeds om, zodat hij zijn schuilplaats verraadde.
Misleiden
Na een aantal pogingen begon de robot zijn tegenstander echter te bedriegen. Hij stootte nu steeds een merkstift om voor een compartiment, waarna hij naar binnen reed in een andere schuilplaats. Op deze manier slaagde de liegende robot er in 75 procent van alle gevallen in om de zoekende robot te misleiden
(zie filmpje).
De zoekende robot was overigens niet op de hoogte van het feit dat de andere robot in staat was om te bedriegen. Volgens de wetenschappers zal het veel moeilijker zijn om een robot te vervaardigen die slimmere tegenstanders kan misleiden.
© NU.nl/Dennis Rijnvis
(nu.nl)
[ Bericht 2% gewijzigd door ExperimentalFrentalMental op 14-09-2010 16:46:50 ]
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Wat betreft de misleiding, in hoeverre is dit 'baanbrekend'?
Zijn die robots zelfstandig vanuit simpele programmering tot dit gedrag gekomen of is dit puur het werk van de programmeurs?
Zijn die robots zelfstandig vanuit simpele programmering tot dit gedrag gekomen of is dit puur het werk van de programmeurs?
2147483647 angels can dance on the point of a needle.
Add one and they will all turn into devils.
Add one and they will all turn into devils.
24-09-2010
Robots zullen tegen 2050 beste voetballers verslaan
Goed nieuws voor wie alle geloof in onze nationale ploeg verloren heeft. Een computeranalist denkt dat we tegen 2050 een team robots kunnen samenstellen die de beste voetballers te wereld zullen verslaan.
Claude Sammut is een wetenschapsprofessor aan de Australische universiteit New South Wales. Hij werkt mee aan een project met de naam RoboCup, waarbij robots leren hoe ze voetbal moeten spelen. Volgens Sammut zullen er tegen 2050 robots bestaan die volledig autonoom de sterren van de toekomst kunnen verslaan.
Op dit ogenblik hebben de robots het nog moeilijk met het controleren en dribbelen van de bal. Maar Sammut gelooft in zijn robots. "In 1968 heeft Donald Michie met de Schotse schaakkampioen David Levy gewed dat hij binnen tien jaar verslagen zou worden door een computerprogramma. Het duurde uiteindelijk bijna 30 jaar, maar de programma's bestaan intussen wel."
Om een robot te doen voetballen zijn er nog veel nieuwe technieken nodig. Sammut denkt daarom dat het nog wel even zal duren voor we een team robots kunnen opstellen. Tegen 2050 zou het eerste Roboteam er echter moeten kunnen in slagen om een menselijk elftal te verslaan. (gb)
(HLN)
Robots zullen tegen 2050 beste voetballers verslaan

Goed nieuws voor wie alle geloof in onze nationale ploeg verloren heeft. Een computeranalist denkt dat we tegen 2050 een team robots kunnen samenstellen die de beste voetballers te wereld zullen verslaan.
Claude Sammut is een wetenschapsprofessor aan de Australische universiteit New South Wales. Hij werkt mee aan een project met de naam RoboCup, waarbij robots leren hoe ze voetbal moeten spelen. Volgens Sammut zullen er tegen 2050 robots bestaan die volledig autonoom de sterren van de toekomst kunnen verslaan.
Op dit ogenblik hebben de robots het nog moeilijk met het controleren en dribbelen van de bal. Maar Sammut gelooft in zijn robots. "In 1968 heeft Donald Michie met de Schotse schaakkampioen David Levy gewed dat hij binnen tien jaar verslagen zou worden door een computerprogramma. Het duurde uiteindelijk bijna 30 jaar, maar de programma's bestaan intussen wel."
Om een robot te doen voetballen zijn er nog veel nieuwe technieken nodig. Sammut denkt daarom dat het nog wel even zal duren voor we een team robots kunnen opstellen. Tegen 2050 zou het eerste Roboteam er echter moeten kunnen in slagen om een menselijk elftal te verslaan. (gb)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
quote:Op dinsdag 21 september 2010 15:59 schreef jeroen25 het volgende:
Wat betreft de misleiding, in hoeverre is dit 'baanbrekend'?
Zijn die robots zelfstandig vanuit simpele programmering tot dit gedrag gekomen of is dit puur het werk van de programmeurs?
quote:Het onderzoek toont aan dat robots mogelijk zo kunnen worden geprogrammeerd dat ze in het geval van een conflict in staat zijn om tegenstanders te bedriegen.
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
27-09-2010
TU/e maakt compactere operatierobot
EINDHOVEN - Een onderzoeker van de Technische Universiteit Eindhoven (TU/e) heeft een robot ontwikkeld die chirurgen in staat stelt nog preciezer op afstand te opereren.
© ANP
Het apparaat is compacter dan bestaande operatierobots en daardoor makkelijker in het gebruik, stelde de TU/e maandag.
De robot, die de naam Sofie heeft gekregen, wordt bediend met joysticks. Die geven tegendruk, ook wel force feedback genoemd, zodat de chirurg voelt hoeveel kracht de robot uitoefent.
Onderzoeker Linda van den Bedem promoveerde onlangs op het inmiddels gepatenteerde ontwerp en wil er nu mee de markt op.
© ANP
(nu.nl)
TU/e maakt compactere operatierobot
EINDHOVEN - Een onderzoeker van de Technische Universiteit Eindhoven (TU/e) heeft een robot ontwikkeld die chirurgen in staat stelt nog preciezer op afstand te opereren.
© ANP
Het apparaat is compacter dan bestaande operatierobots en daardoor makkelijker in het gebruik, stelde de TU/e maandag.
De robot, die de naam Sofie heeft gekregen, wordt bediend met joysticks. Die geven tegendruk, ook wel force feedback genoemd, zodat de chirurg voelt hoeveel kracht de robot uitoefent.
Onderzoeker Linda van den Bedem promoveerde onlangs op het inmiddels gepatenteerde ontwerp en wil er nu mee de markt op.
© ANP
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
28-09-2010
Wetenschappers presenteren menselijke wandelende robot
(nieuwemedia.blog.nl)
Wetenschappers presenteren menselijke wandelende robot
(nieuwemedia.blog.nl)

Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
28-09-2010
Robotic legs designed to help people walk again
A robot that can help people who are paralysed walk again is on trial in Japan.
The 'walking-aid robot' works by using six electric motors at the ankles, knees and hips.
Developers say the biggest challenge was getting the device to balance properly so people could use it without stumbling.
Zie filmpje
(www.bbc.co.uk)
Robotic legs designed to help people walk again
A robot that can help people who are paralysed walk again is on trial in Japan.
The 'walking-aid robot' works by using six electric motors at the ankles, knees and hips.
Developers say the biggest challenge was getting the device to balance properly so people could use it without stumbling.
Zie filmpje
(www.bbc.co.uk)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Ze blijven wel dat half-gehurkte loopje hebben.quote:Op woensdag 29 september 2010 08:54 schreef ExperimentalFrentalMental het volgende:
28-09-2010
Wetenschappers presenteren menselijke wandelende robot
(nieuwemedia.blog.nl)
2147483647 angels can dance on the point of a needle.
Add one and they will all turn into devils.
Add one and they will all turn into devils.
Tja, het is nog steeds lastig om het locomotorisch systeem van de mens na te bootsen, wanneer ook stilstaan, traplopen, rennen en andere eisen worden gesteld.quote:Op woensdag 29 september 2010 09:07 schreef jeroen25 het volgende:
[..]
Ze blijven wel dat half-gehurkte loopje hebben.
01-10-2010
Draadloze besturing voor zwemmende robot
Een robot vanaf een afstand draadloos besturen is tegenwoordig een koud kunstje. Maar niet onder water; daarvoor was een kabel naar een boot aan het wateroppervlak vaak niet te vermijden. Een team van York University presenteert nu echter “AQUA”: de onderwaterrobot met draadloze besturing.
Water kan soms heel vervelend zijn. Het verstoort radiosignalen en maakt draadloze communicatie zoals Wi-Fi onderwater vrijwel onmogelijk. Onderwaterrobots worden daarom meestal via een kabel verbonden met het ‘moederschip’. Dat is geen optimale situatie, want het maakt de robot minder mobiel en kan de veiligheid van duikers in gevaar brengen.
Daar hebben de onderzoekers van York University (Toronto, Canada) nu iets op gevonden. Zij ontwierpen AQUA, een onderwaterrobot die zwemt als een otter, met flippers in plaats van de gebruikelijke propellers. Het meest bijzondere is echter de besturing. AQUA kan met een controller van afstand worden bestuurd door een duiker die ook onder water is.
Ter plekke beslissen
De controller is een soort iPad, een tablet waar de duiker allerlei informatie op kan bekijken. Hij kan er ook op programmeren, zodat het scherm een bepaalde tag toont. Die tag, zoiets als een bar- of QR-code], kan de robot vervolgens aflezen door de camera die hij aan boord heeft. En zo kan de robot het ingeprogrammeerde commando van de duiker ter plekke uitvoeren.
Die directe controle is een belangrijk (en nieuw) aspect. “Het is onmogelijk in te schatten wat je van de robot wilt wanneer je eenmaal onder water bent. Wij wilden een systeem ontwikkelen waarmee je ter plaatse, in reactie op de omgeving, commando’s aan kunt maken.” vertelt Michael Jenkin, professor aan York University en lid van het onderzoeksteam.
In het verleden maakten duikers nog wel eens gebruik van gelamineerde kaartjes, waarmee ze op een visuele manier met de robots onder water konden communiceren. Het nadeel hiervan is dat de duiker hierbij beperkt is tot een aantal vooraf ingeprogrammeerde commando’s.
Robots naar Titanic
Afbeelding: © Flickr: j-fi
Eerder kon je op Kennislink lezen over de expeditie naar het wrak van de Titanic. Hierbij werd ook gebruik gemaakt van onderwaterrobots, zogenaamde AUVs en een ROV. De AUVs gingen zonder kabel en bemanning te werk, maar bij hen waren alle taken van tevoren ingeprogrammeerd. Zij konden niet ter plekke met eventuele duikers communiceren.
Een kabel naar de oppervlakte is ook onhandig. “Als een robot via een kabel verbonden is met een boot aan het oppervlakte, kan de communicatie tussen de boot, de duiker en de robot erg ingewikkeld worden,” zegt Jenkins. “Het onderzoeken van een wrak vereist bijvoorbeeld een heel voorzichtige en nauwkeurige aanpak; duikers en robots moeten dan in staat zijn snel te reageren op veranderingen in de omgeving. Een fout of vertraging in de communicatie kan dan gevaarlijke situaties opleveren.” aldus Jenkins.
Op afstand besturen
Aangezien er geen communicatieapparaat op de markt was die aan hun eisen voldeed, ontwikkelden Jenkins en zijn team een eigen prototype. Hun AQUATablet wordt bescherm door een aluminium behuizing met plexiglas ruitje. Het maakt de computer waterdicht tot zo’n 18 meter diepte. De robot kan echter nog dieper gaan. Jenkins: “Een duiker op 18 meter diepte kan een robot besturen die 9 tot 12 meter onder hem zwemt. Het is duidelijk dat dit fysiek beter voor de duiker is en veel veiliger”.
Een duiker kan niet alleen commando’s inprogrammeren, hij kan het tablet ook als een soort joystick gebruiken. Het is vergelijkbaar met wakeboarden op de Wii (zie filmpje hiernaast): draai je de controller naar rechts, dan gaat de robot ook naar rechts.
De robot is in deze modus echter wel met een kabel aan het tablet verbonden. Maar dat heeft ook voordelen, want door de optische kabel kan de robot videobeelden van zijn camera naar de duiker sturen. Die beelden kunnen gebruikt worden om een 3D-model van de omgeving op te bouwen, waarmee de robot zijn taken nauwkeuriger kan uitvoeren.
De publicatie “Swimming with Robots: Human Robot Communication at Depth” van auteurs Bart Verzijlenberg en Michael Jenkins zal gepresenteerd worden tijdens de IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) van 18 tot 22 oktober in Taiwan.
(Kennislink)
Draadloze besturing voor zwemmende robot
Een robot vanaf een afstand draadloos besturen is tegenwoordig een koud kunstje. Maar niet onder water; daarvoor was een kabel naar een boot aan het wateroppervlak vaak niet te vermijden. Een team van York University presenteert nu echter “AQUA”: de onderwaterrobot met draadloze besturing.
Water kan soms heel vervelend zijn. Het verstoort radiosignalen en maakt draadloze communicatie zoals Wi-Fi onderwater vrijwel onmogelijk. Onderwaterrobots worden daarom meestal via een kabel verbonden met het ‘moederschip’. Dat is geen optimale situatie, want het maakt de robot minder mobiel en kan de veiligheid van duikers in gevaar brengen.
Daar hebben de onderzoekers van York University (Toronto, Canada) nu iets op gevonden. Zij ontwierpen AQUA, een onderwaterrobot die zwemt als een otter, met flippers in plaats van de gebruikelijke propellers. Het meest bijzondere is echter de besturing. AQUA kan met een controller van afstand worden bestuurd door een duiker die ook onder water is.
Ter plekke beslissen
De controller is een soort iPad, een tablet waar de duiker allerlei informatie op kan bekijken. Hij kan er ook op programmeren, zodat het scherm een bepaalde tag toont. Die tag, zoiets als een bar- of QR-code], kan de robot vervolgens aflezen door de camera die hij aan boord heeft. En zo kan de robot het ingeprogrammeerde commando van de duiker ter plekke uitvoeren.
Die directe controle is een belangrijk (en nieuw) aspect. “Het is onmogelijk in te schatten wat je van de robot wilt wanneer je eenmaal onder water bent. Wij wilden een systeem ontwikkelen waarmee je ter plaatse, in reactie op de omgeving, commando’s aan kunt maken.” vertelt Michael Jenkin, professor aan York University en lid van het onderzoeksteam.

In het verleden maakten duikers nog wel eens gebruik van gelamineerde kaartjes, waarmee ze op een visuele manier met de robots onder water konden communiceren. Het nadeel hiervan is dat de duiker hierbij beperkt is tot een aantal vooraf ingeprogrammeerde commando’s.
Robots naar Titanic

Afbeelding: © Flickr: j-fi
Eerder kon je op Kennislink lezen over de expeditie naar het wrak van de Titanic. Hierbij werd ook gebruik gemaakt van onderwaterrobots, zogenaamde AUVs en een ROV. De AUVs gingen zonder kabel en bemanning te werk, maar bij hen waren alle taken van tevoren ingeprogrammeerd. Zij konden niet ter plekke met eventuele duikers communiceren.
Een kabel naar de oppervlakte is ook onhandig. “Als een robot via een kabel verbonden is met een boot aan het oppervlakte, kan de communicatie tussen de boot, de duiker en de robot erg ingewikkeld worden,” zegt Jenkins. “Het onderzoeken van een wrak vereist bijvoorbeeld een heel voorzichtige en nauwkeurige aanpak; duikers en robots moeten dan in staat zijn snel te reageren op veranderingen in de omgeving. Een fout of vertraging in de communicatie kan dan gevaarlijke situaties opleveren.” aldus Jenkins.
Op afstand besturen
Aangezien er geen communicatieapparaat op de markt was die aan hun eisen voldeed, ontwikkelden Jenkins en zijn team een eigen prototype. Hun AQUATablet wordt bescherm door een aluminium behuizing met plexiglas ruitje. Het maakt de computer waterdicht tot zo’n 18 meter diepte. De robot kan echter nog dieper gaan. Jenkins: “Een duiker op 18 meter diepte kan een robot besturen die 9 tot 12 meter onder hem zwemt. Het is duidelijk dat dit fysiek beter voor de duiker is en veel veiliger”.
Een duiker kan niet alleen commando’s inprogrammeren, hij kan het tablet ook als een soort joystick gebruiken. Het is vergelijkbaar met wakeboarden op de Wii (zie filmpje hiernaast): draai je de controller naar rechts, dan gaat de robot ook naar rechts.

De robot is in deze modus echter wel met een kabel aan het tablet verbonden. Maar dat heeft ook voordelen, want door de optische kabel kan de robot videobeelden van zijn camera naar de duiker sturen. Die beelden kunnen gebruikt worden om een 3D-model van de omgeving op te bouwen, waarmee de robot zijn taken nauwkeuriger kan uitvoeren.
De publicatie “Swimming with Robots: Human Robot Communication at Depth” van auteurs Bart Verzijlenberg en Michael Jenkins zal gepresenteerd worden tijdens de IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) van 18 tot 22 oktober in Taiwan.
(Kennislink)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
15-10-2010
Zes mannen laten zich voor wetenschap slaan door robot
Povse deed eerst tests met een rubberen arm. (foto Borut Povse)
Ergens in een laboratorium in Slovenië laten zes mannen zich in naam van de wetenschap pijnigen door een robot. Het doel daarvan is te achterhalen wanneer de pijn te erg wordt, om zo robots te kunnen aanleren hoe ver ze kunnen gaan vooraleer ze een mens pijn doen.
Professor Borut Povse is er voor zijn experiment in geslaagd de toestemming te krijgen van een ethische commissie, en daarnaast heeft hij zes collega's kunnen overtuigen deel te nemen aan de proeven, meldt het vakblad New Scientist.
Povse ziet mens en robot op een dag zij aan zij werken, en vindt het belangrijk om machines te leren een soort van empathie te hebben voor hun menselijke collega's. "In de toekomst zullen robots niet werken achter bewakingsagenten met gesloten deuren of lichtbarrières", schreef Povse in een eerdere paper over het onderwerp. "Integendeel, ze zullen nauw samenwerken met mensen, wat leidt tot een fundamentele zorg over de vraag hoe we de veiligheid van die interactie kunnen verzekeren."
Povse gebruikte voor eerdere experimenten een rubberen arm met sensoren in. Een pdf van het onderzoek vind je hier. (sam)
(HLN)
Zes mannen laten zich voor wetenschap slaan door robot

Povse deed eerst tests met een rubberen arm. (foto Borut Povse)
Ergens in een laboratorium in Slovenië laten zes mannen zich in naam van de wetenschap pijnigen door een robot. Het doel daarvan is te achterhalen wanneer de pijn te erg wordt, om zo robots te kunnen aanleren hoe ver ze kunnen gaan vooraleer ze een mens pijn doen.
Professor Borut Povse is er voor zijn experiment in geslaagd de toestemming te krijgen van een ethische commissie, en daarnaast heeft hij zes collega's kunnen overtuigen deel te nemen aan de proeven, meldt het vakblad New Scientist.
Povse ziet mens en robot op een dag zij aan zij werken, en vindt het belangrijk om machines te leren een soort van empathie te hebben voor hun menselijke collega's. "In de toekomst zullen robots niet werken achter bewakingsagenten met gesloten deuren of lichtbarrières", schreef Povse in een eerdere paper over het onderwerp. "Integendeel, ze zullen nauw samenwerken met mensen, wat leidt tot een fundamentele zorg over de vraag hoe we de veiligheid van die interactie kunnen verzekeren."
Povse gebruikte voor eerdere experimenten een rubberen arm met sensoren in. Een pdf van het onderzoek vind je hier. (sam)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
15-10-2010
'Baby’s zien robot aan voor mens'
AMSTERDAM – Baby’s zien robots aan voor levende wezens als de apparaten interacties aangaan met andere mensen. Dat concluderen Amerikaanse wetenschappers uit een nieuw onderzoek.
Kinderen van 18 maanden oud maken geen onderscheid tussen robots en mensen als de apparaten eerst contact leggen met personen in hun omgeving.
Dat blijkt uit oogbewegingen van de baby’s tijdens interacties met robots, zo melden wetenschappers van de Universiteit van Washington in het wetenschappelijk tijdschrift Neural Networks.
Spelletje
“De vraag is wat een robot sociaal maakt voor een baby”, verklaart onderzoeker Andrew Meltzoff op nieuwssite EurekAlert. “Waarschijnlijk wordt dat niet bepaald door hoe een apparaat er uit ziet, maar wel door hoe het zich beweegt en op welke manier het een interactie aan gaat met anderen.”
De wetenschappers kwamen tot hun conclusies door baby’s te confronteren met robots, terwijl ze op schoot zaten bij hun ouders. De onderzoekers stelden vervolgens kinderlijke vragen aan de robot, zoals ‘waar is je buik?’ en ‘waar zit je hoofd?’. De robot wees vervolgens steeds naar het juiste lichaamsdeel.
De baby’s volgden het gesprek door hun blik heen en weer te laten gaan tussen onderzoeker en de robot.
Aandacht
Uiteindelijk lieten de wetenschappers de baby’s alleen met de robots. De apparaten begonnen dan met hun hoofd te bewegen en maakten geluiden om de aandacht van de kinderen te trekken.
De baby’s volgden de blik van de robot op dat moment met hun ogen. Volgens de wetenschappers suggereerden die oogbewegingen dat de kinderen de robot aanzagen voor een menselijk wezen.
Interacties
Kinderen van 18 maanden oud kunnen normaal gesproken al een verschil maken tussen levende wezens en levensloze objecten. Ze volgen met hun ogen vaak wel de bewegingen van mensen of dieren, maar reageren met hun blik bijvoorbeeld niet op een schommelstoel die heen en weer beweegt.
“Deze studie suggereert dat een zogenaamde menselijke robot niet alleen het uiterlijk van een mens moet hebben, maar ook interacties moet aangaan met mensen”, aldus onderzoeker Rajesh Rao.
© NU.nl/Dennis Rijnvis
(nu.nl)
'Baby’s zien robot aan voor mens'
AMSTERDAM – Baby’s zien robots aan voor levende wezens als de apparaten interacties aangaan met andere mensen. Dat concluderen Amerikaanse wetenschappers uit een nieuw onderzoek.
Kinderen van 18 maanden oud maken geen onderscheid tussen robots en mensen als de apparaten eerst contact leggen met personen in hun omgeving.
Dat blijkt uit oogbewegingen van de baby’s tijdens interacties met robots, zo melden wetenschappers van de Universiteit van Washington in het wetenschappelijk tijdschrift Neural Networks.
Spelletje
“De vraag is wat een robot sociaal maakt voor een baby”, verklaart onderzoeker Andrew Meltzoff op nieuwssite EurekAlert. “Waarschijnlijk wordt dat niet bepaald door hoe een apparaat er uit ziet, maar wel door hoe het zich beweegt en op welke manier het een interactie aan gaat met anderen.”
De wetenschappers kwamen tot hun conclusies door baby’s te confronteren met robots, terwijl ze op schoot zaten bij hun ouders. De onderzoekers stelden vervolgens kinderlijke vragen aan de robot, zoals ‘waar is je buik?’ en ‘waar zit je hoofd?’. De robot wees vervolgens steeds naar het juiste lichaamsdeel.
De baby’s volgden het gesprek door hun blik heen en weer te laten gaan tussen onderzoeker en de robot.
Aandacht
Uiteindelijk lieten de wetenschappers de baby’s alleen met de robots. De apparaten begonnen dan met hun hoofd te bewegen en maakten geluiden om de aandacht van de kinderen te trekken.
De baby’s volgden de blik van de robot op dat moment met hun ogen. Volgens de wetenschappers suggereerden die oogbewegingen dat de kinderen de robot aanzagen voor een menselijk wezen.
Interacties
Kinderen van 18 maanden oud kunnen normaal gesproken al een verschil maken tussen levende wezens en levensloze objecten. Ze volgen met hun ogen vaak wel de bewegingen van mensen of dieren, maar reageren met hun blik bijvoorbeeld niet op een schommelstoel die heen en weer beweegt.
“Deze studie suggereert dat een zogenaamde menselijke robot niet alleen het uiterlijk van een mens moet hebben, maar ook interacties moet aangaan met mensen”, aldus onderzoeker Rajesh Rao.
© NU.nl/Dennis Rijnvis
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

Een meer serieuze post:
!
Een dansende robot die met een groepje meiden mee danst/zingt. De robot-artiest danst niet zo wild als de achtergrondzangeressen, maar toch is de manier van bewegen beter dan ik tot nu toe gezien heb.
Bronartikel: http://singularityhub.com(...)tting-weirder-video/
[ Bericht 8% gewijzigd door zyx1981 op 24-10-2010 12:38:41 ]
!


Een dansende robot die met een groepje meiden mee danst/zingt. De robot-artiest danst niet zo wild als de achtergrondzangeressen, maar toch is de manier van bewegen beter dan ik tot nu toe gezien heb.
Bronartikel: http://singularityhub.com(...)tting-weirder-video/
[ Bericht 8% gewijzigd door zyx1981 op 24-10-2010 12:38:41 ]
Ik hou van Azie 
Nog meer dansende robots! Nu een robot-dansgroep die ondermeer een choreografie op Ravel's Bolero laten zien
!
Bronartikel: http://singularityhub.com(...)shanghai-expo-video/
Edit: technische achtergrond info over dit van origine Franse robotje: http://www.aldebaran-robotics.com/en/node/1166 Voor 12.000 euro ex btw kan je zelf zo`n 58cm hoge hummel in huis halen
[ Bericht 11% gewijzigd door zyx1981 op 24-10-2010 12:49:29 ]
Nog meer dansende robots! Nu een robot-dansgroep die ondermeer een choreografie op Ravel's Bolero laten zien
!

Bronartikel: http://singularityhub.com(...)shanghai-expo-video/
Edit: technische achtergrond info over dit van origine Franse robotje: http://www.aldebaran-robotics.com/en/node/1166 Voor 12.000 euro ex btw kan je zelf zo`n 58cm hoge hummel in huis halen
[ Bericht 11% gewijzigd door zyx1981 op 24-10-2010 12:49:29 ]
Eentje nog om het af te leren. Een robot rent 7km/u en stabiliseert zichzelf wanneer iemand hem aanduwt:
Bronartikel: http://singularityhub.com(...)obot-runs-at-7-kmhr/

Bronartikel: http://singularityhub.com(...)obot-runs-at-7-kmhr/
Wereldprimeur voor Duits Lab: de humanoïde robot ‘Myon’
Sascha Bollerman - 12-10-2010
Inleiding
Het TWA-netwerk in Berlijn bericht regelmatig over de nieuwste ontwikkelingen op het gebied van de robotica in Duitsland. Nu is er nieuws uit de Duitse hoofdstad zelf; het Laboratorium voor Neurorobotica (NRL) van de Humboldt Universiteit Berlijn is erin geslaagd ’s werelds eerste humanoïde robot te ontwikkelen waarbij men zonder problemen in werkende toestand zowel ‘lichaamsdelen’ kan demonteren als met behulp van een flensverbinding kan monteren.
Details
Dit beginsel klinkt minder revolutionair dan het in werkelijkheid is. Bij het demonteren van bijvoorbeeld een ‘arm’ blijven alle overige ledematen onberispelijk verder functioneren aangezien deze in een drietal opzichten autonoom zijn: de energievoorziening, het rekenvermogen en het neuraal netwerk zijn compleet decentraal over de robot verdeeld.
Het principe biedt vele voordelen voor onderzoek. Men kan bijvoorbeeld gedragingen (zoals lopen) allereerst aan een geïsoleerd ledemaat (been) ontwikkelen alvorens men overgaat tot het onderzoek van hoe het lichaam als geheel reageert en functioneert (geïncorporeerd been). Daarnaast biedt het antwoorden op geheel nieuwe vraagstukken zoals wat er gebeurt als twee robots wisselen van arm of als een robot plots een ongetraind been ontvangt.
Figuur 1. De 1,25 meter grote Myon is een systeem met een zeer hoge mate van complexiteit. Het geheel stort niet ineen als men elektronica verwijdert dan wel een kabelbreuk veroorzaakt omdat alle ledematen meerdere malen met elkaar gekoppeld zijn en coöperatief met elkaar samenwerken.
Myon is één van vijf robots uit de M-serie van het NRL. De ontwikkeling van de robot is tot stand gekomen in het kader van het Europese project ALEAR. Verder heeft het laboratorium nauw samengewerkt met het Frackenpohl Poulheim, een bureau voor product design, en met één van ‘s werelds grootste producenten van polymeren en plastics, Bayer MaterialScience.
http://www.twanetwerk.nl/default.ashx?DocumentID=14493
Sascha Bollerman - 12-10-2010
Inleiding
Het TWA-netwerk in Berlijn bericht regelmatig over de nieuwste ontwikkelingen op het gebied van de robotica in Duitsland. Nu is er nieuws uit de Duitse hoofdstad zelf; het Laboratorium voor Neurorobotica (NRL) van de Humboldt Universiteit Berlijn is erin geslaagd ’s werelds eerste humanoïde robot te ontwikkelen waarbij men zonder problemen in werkende toestand zowel ‘lichaamsdelen’ kan demonteren als met behulp van een flensverbinding kan monteren.
Details
Dit beginsel klinkt minder revolutionair dan het in werkelijkheid is. Bij het demonteren van bijvoorbeeld een ‘arm’ blijven alle overige ledematen onberispelijk verder functioneren aangezien deze in een drietal opzichten autonoom zijn: de energievoorziening, het rekenvermogen en het neuraal netwerk zijn compleet decentraal over de robot verdeeld.
Het principe biedt vele voordelen voor onderzoek. Men kan bijvoorbeeld gedragingen (zoals lopen) allereerst aan een geïsoleerd ledemaat (been) ontwikkelen alvorens men overgaat tot het onderzoek van hoe het lichaam als geheel reageert en functioneert (geïncorporeerd been). Daarnaast biedt het antwoorden op geheel nieuwe vraagstukken zoals wat er gebeurt als twee robots wisselen van arm of als een robot plots een ongetraind been ontvangt.

Figuur 1. De 1,25 meter grote Myon is een systeem met een zeer hoge mate van complexiteit. Het geheel stort niet ineen als men elektronica verwijdert dan wel een kabelbreuk veroorzaakt omdat alle ledematen meerdere malen met elkaar gekoppeld zijn en coöperatief met elkaar samenwerken.
Myon is één van vijf robots uit de M-serie van het NRL. De ontwikkeling van de robot is tot stand gekomen in het kader van het Europese project ALEAR. Verder heeft het laboratorium nauw samengewerkt met het Frackenpohl Poulheim, een bureau voor product design, en met één van ‘s werelds grootste producenten van polymeren en plastics, Bayer MaterialScience.
http://www.twanetwerk.nl/default.ashx?DocumentID=14493
Je ziet de laatste tijd toch wel duidelijke progressie in gehele robots. Tijden lang had ontwikkelde men of goede robotbenen, of een goed bovenlichaam, maar die aan elkaar koppelen bleef altijd een probleem, vooral bij soepele bewegingen en evenwicht.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
06-11-2010
Robots dansen en vechten op festival
ILSAN - Robots kregen een staande ovatie van toeschouwers bij 's werelds grootste robotfestival dezer dagen in de stad Ilsan in Zuid-Korea.
© Thinkstock
Robots gaven een dansvoorstelling. Andere speelden een voetbalwedstrijd, waarbij de winnaars juichend in lucht sprongen bij een goal. Andere vielen elkaar aan met wedstrijdjes taekwondo.
Zo'n 120.000 toeschouwers bij het jaarlijkse festival Robot World zagen hoe robots steeds meer op mensen lijken.
''De techniek is zeker een stuk verbeterd vergeleken met vorig jaar'', vindt Hyun Yun-Duk, onderwijzer van de Incheon hogere technische school. Zuid-Korea steekt al jaren veel geld en energie in de ontwikkeling van robottechniek..
Hoog niveau
''Verbazingwekkend hoe hoog het niveau van de robots hier is. Dit is moeilijk voor te stellen in Spanje'', zei Spanjaard Sergi Hernandez van het bedrijf IRI, dat robots had ingestuurd die de macarena dansten.
© ANP
(nu.nl)
Robots dansen en vechten op festival
ILSAN - Robots kregen een staande ovatie van toeschouwers bij 's werelds grootste robotfestival dezer dagen in de stad Ilsan in Zuid-Korea.

© Thinkstock
Robots gaven een dansvoorstelling. Andere speelden een voetbalwedstrijd, waarbij de winnaars juichend in lucht sprongen bij een goal. Andere vielen elkaar aan met wedstrijdjes taekwondo.
Zo'n 120.000 toeschouwers bij het jaarlijkse festival Robot World zagen hoe robots steeds meer op mensen lijken.
''De techniek is zeker een stuk verbeterd vergeleken met vorig jaar'', vindt Hyun Yun-Duk, onderwijzer van de Incheon hogere technische school. Zuid-Korea steekt al jaren veel geld en energie in de ontwikkeling van robottechniek..
Hoog niveau
''Verbazingwekkend hoe hoog het niveau van de robots hier is. Dit is moeilijk voor te stellen in Spanje'', zei Spanjaard Sergi Hernandez van het bedrijf IRI, dat robots had ingestuurd die de macarena dansten.
© ANP
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
12-11-2010
Robot wast patiënten
Onderzoekers van het Amerikaanse Georgia Instituut voor Technologie hebben een robot ontworpen die gebruikt wordt om ziekenhuispatiënten te wassen. Cody gebruikt een camera en een laser om gegevens te verzamelen over de persoon die gewassen moet worden en gaat vervolgens aan de slag.
Krachten doseren
Voornaamste opdracht voor Cody is dat hij zijn krachten moet doseren. Drukt de robot de spons te hard op de huid van de patiënt, dan doet hij hem of haar misschien pijn. Drukt de robot te zacht, dan wordt een patiënt niet terdege gewassen.
Hoofdonderzoeker Chih-Hung King liet zichzelf wassen door de robot. "In het begin voelde ik me een beetje gespannen, maar dat ging al snel over", zegt King. "De robot heeft me geen pijn gedaan."
Besparingen
De robot kan ingezet worden in ziekenhuizen en bejaardenhuizen. Hierdoor heeft het menselijke personeel tijd voor andere werkzaamheden en zijn er minder mensen nodig in de zorg.
Schaamte
Een bijkomend voordeel van de wasrobot is dat veel mensen niet graag een sponsbad krijgen van een mens, omdat ze zich dan misschien zouden schamen. Ook is een wasrobot mogelijk hygiënischer. (eb)
(HLN)
Robot wast patiënten

Onderzoekers van het Amerikaanse Georgia Instituut voor Technologie hebben een robot ontworpen die gebruikt wordt om ziekenhuispatiënten te wassen. Cody gebruikt een camera en een laser om gegevens te verzamelen over de persoon die gewassen moet worden en gaat vervolgens aan de slag.
Krachten doseren
Voornaamste opdracht voor Cody is dat hij zijn krachten moet doseren. Drukt de robot de spons te hard op de huid van de patiënt, dan doet hij hem of haar misschien pijn. Drukt de robot te zacht, dan wordt een patiënt niet terdege gewassen.
Hoofdonderzoeker Chih-Hung King liet zichzelf wassen door de robot. "In het begin voelde ik me een beetje gespannen, maar dat ging al snel over", zegt King. "De robot heeft me geen pijn gedaan."
Besparingen
De robot kan ingezet worden in ziekenhuizen en bejaardenhuizen. Hierdoor heeft het menselijke personeel tijd voor andere werkzaamheden en zijn er minder mensen nodig in de zorg.
Schaamte
Een bijkomend voordeel van de wasrobot is dat veel mensen niet graag een sponsbad krijgen van een mens, omdat ze zich dan misschien zouden schamen. Ook is een wasrobot mogelijk hygiënischer. (eb)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
28-12-2010
Robots geven les op basisscholen in Zuid-Korea
AMSTERDAM – Leerlingen op basisscholen in de Zuid-Koreaanse stad Daegu krijgen sinds deze week Engelse les van 29 robots. De apparaten worden bestuurd door leraren op de Filippijnen.
De 29 onderwijsrobots zijn ongeveer een meter groot en rijden op wielen door klaslokalen in Daegu.
Ze kunnen spreken met de leerlingen en gebaren maken met hun armen. Hun hoofd bestaat uit een televisiescherm, waarop een geanimeerd gezicht is afgebeeld. Dat meldt persbureau AFP.
De apparaten worden op afstand bestuurd door onderwijzers op de Filippijnen. De gezichtsuitdrukkingen van de menselijke leraren worden gedetecteerd door camera’s en weergegeven op het gezicht van de robots.
Goedkoper
De lessen van de robots zijn onderdeel van een ruim één miljoen euro kostend proefproject van het Zuid-Koreaanse Ministerie van Onderwijs. De leraren op wielen zijn ontwikkeld door wetenschappers van het Korea Institute of Science and Technology.
Volgens hoofdonderzoeker Sagong Seong-Dae zijn de apparaten uiteindelijk goedkoper dan menselijke leraren, omdat ze worden bestuurd vanuit de Filippijnen. “Goed opgeleide Filippijnse leraren zijn veel goedkoper dan de leraren hier in Zuid-Korea”, verklaart de wetenschapper op nieuwssite Physorg.com.
Zingen
De robots praten niet alleen met de kinderen, maar lezen ook boeken voor en zingen en dansen op muziek. De leerlingen reageren volgens onderwijsexperts goed op hun nieuwe leraren.
“De kinderen lijken het allemaal geweldig te vinden, aangezien de robots er schattig en interessant uitzien”, verklaart Kim Mi-Young, woordvoerster van het Ministerie van Onderwijs. “Maar sommige volwassenen zijn ook geïnteresseerd. Ze vinden het makkelijker om tegen een robot te praten, dan tegen een echte persoon.”
Vervanging
Volgens Mi-Young zullen de apparaten menselijke leraren nooit helemaal kunnen vervangen. “Dat is niet de bedoeling van dit project. We willen vooral de interesse van de kinderen wekken.”
Robotontwerper Sagon Seong-Dae ziet wel veel voordelen in het vervangen van menselijke leraren door robots.
“Deze apparaten zullen nooit klagen over hun ziektekostenverzekering, of secundaire arbeidsvoorwaarden”, zegt hij. “Ze zullen de scholen ook niet verlaten voor een beter betaalde baan in Japan. Het enige dat ze nodig hebben is af en toe een reparatie en een software-update.”
© NU.nl/Dennis Rijnvis
(nu.nl)
Robots geven les op basisscholen in Zuid-Korea
AMSTERDAM – Leerlingen op basisscholen in de Zuid-Koreaanse stad Daegu krijgen sinds deze week Engelse les van 29 robots. De apparaten worden bestuurd door leraren op de Filippijnen.
De 29 onderwijsrobots zijn ongeveer een meter groot en rijden op wielen door klaslokalen in Daegu.
Ze kunnen spreken met de leerlingen en gebaren maken met hun armen. Hun hoofd bestaat uit een televisiescherm, waarop een geanimeerd gezicht is afgebeeld. Dat meldt persbureau AFP.

De apparaten worden op afstand bestuurd door onderwijzers op de Filippijnen. De gezichtsuitdrukkingen van de menselijke leraren worden gedetecteerd door camera’s en weergegeven op het gezicht van de robots.
Goedkoper
De lessen van de robots zijn onderdeel van een ruim één miljoen euro kostend proefproject van het Zuid-Koreaanse Ministerie van Onderwijs. De leraren op wielen zijn ontwikkeld door wetenschappers van het Korea Institute of Science and Technology.
Volgens hoofdonderzoeker Sagong Seong-Dae zijn de apparaten uiteindelijk goedkoper dan menselijke leraren, omdat ze worden bestuurd vanuit de Filippijnen. “Goed opgeleide Filippijnse leraren zijn veel goedkoper dan de leraren hier in Zuid-Korea”, verklaart de wetenschapper op nieuwssite Physorg.com.
Zingen
De robots praten niet alleen met de kinderen, maar lezen ook boeken voor en zingen en dansen op muziek. De leerlingen reageren volgens onderwijsexperts goed op hun nieuwe leraren.
“De kinderen lijken het allemaal geweldig te vinden, aangezien de robots er schattig en interessant uitzien”, verklaart Kim Mi-Young, woordvoerster van het Ministerie van Onderwijs. “Maar sommige volwassenen zijn ook geïnteresseerd. Ze vinden het makkelijker om tegen een robot te praten, dan tegen een echte persoon.”
Vervanging
Volgens Mi-Young zullen de apparaten menselijke leraren nooit helemaal kunnen vervangen. “Dat is niet de bedoeling van dit project. We willen vooral de interesse van de kinderen wekken.”
Robotontwerper Sagon Seong-Dae ziet wel veel voordelen in het vervangen van menselijke leraren door robots.
“Deze apparaten zullen nooit klagen over hun ziektekostenverzekering, of secundaire arbeidsvoorwaarden”, zegt hij. “Ze zullen de scholen ook niet verlaten voor een beter betaalde baan in Japan. Het enige dat ze nodig hebben is af en toe een reparatie en een software-update.”
© NU.nl/Dennis Rijnvis
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
01-03-2011
Razendsnelle cheetah-robot in ontwikkeling
AMSTERDAM - Het Amerikaanse ministerie van Defensie heeft wetenschappers de opdracht gegeven om de snelst lopende robot ter wereld te bouwen.
© Boston Dynamics
De robot met de naam ‘Cheetah’ wordt ontwikkeld door het bedrijf Boston Dynamics. Het apparaat zal zich voortbewegen op vier poten en krijgt het uiterlijk van het snelste landdier ter wereld: de cheeta.
Het is de bedoeling dat de robot al rennend een snelheid van 30 tot 45 kilometer per uur zal gaan halen. Dat meldt het Amerikaanse tijdschrift Popsci.com.
Naamgenoot
Volgens de ontwikkelaars is het zelfs mogelijk dat ‘Cheetah’ op termijn even hard zal lopen als naamgenoot van vlees en bloed.
“Er is geen fundamentele reden waarom we niet dezelfde snelheden als de dieren kunnen halen, dus 95 tot 110 kilometer per uur”, verklaart Marc Raibert, president van Boston Dynamics.
Klimmen
De bouw van ‘Cheetah’ gaat enkele miljoenen dollars kosten en wordt gefinancieerd door DARPA, een instituut van het Amerikaanse Ministerie van Defensie. Het robotdier moet over twintig maanden al klaar zijn.
Het is nog niet bekend voor welke doeleinden het apparaat zal worden ingezet door het leger.
Naast ‘Cheetah’ zal Boston Dynamics ook een mensachtige robot gaan ontwikkelen die kan klimmen en in staat is om kleine ruimtes te verkennen.
© NU.nl/Dennis Rijnvis
(nu.nl)
Razendsnelle cheetah-robot in ontwikkeling
AMSTERDAM - Het Amerikaanse ministerie van Defensie heeft wetenschappers de opdracht gegeven om de snelst lopende robot ter wereld te bouwen.

© Boston Dynamics
De robot met de naam ‘Cheetah’ wordt ontwikkeld door het bedrijf Boston Dynamics. Het apparaat zal zich voortbewegen op vier poten en krijgt het uiterlijk van het snelste landdier ter wereld: de cheeta.
Het is de bedoeling dat de robot al rennend een snelheid van 30 tot 45 kilometer per uur zal gaan halen. Dat meldt het Amerikaanse tijdschrift Popsci.com.
Naamgenoot
Volgens de ontwikkelaars is het zelfs mogelijk dat ‘Cheetah’ op termijn even hard zal lopen als naamgenoot van vlees en bloed.
“Er is geen fundamentele reden waarom we niet dezelfde snelheden als de dieren kunnen halen, dus 95 tot 110 kilometer per uur”, verklaart Marc Raibert, president van Boston Dynamics.
Klimmen
De bouw van ‘Cheetah’ gaat enkele miljoenen dollars kosten en wordt gefinancieerd door DARPA, een instituut van het Amerikaanse Ministerie van Defensie. Het robotdier moet over twintig maanden al klaar zijn.
Het is nog niet bekend voor welke doeleinden het apparaat zal worden ingezet door het leger.
Naast ‘Cheetah’ zal Boston Dynamics ook een mensachtige robot gaan ontwikkelen die kan klimmen en in staat is om kleine ruimtes te verkennen.
© NU.nl/Dennis Rijnvis
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
dan is het volgens mij geen robot.quote:Op woensdag 24 maart 2010 10:36 schreef Forno het volgende:
Volgens gaat het om een robot bestuurt door de mens.
08-03-2011
Robot leert autistische kindjes om te gaan met emoties
© ap
Autistische kinderen hebben het moeilijk om hun emoties te uiten. Vaak reageren ze afwijzend op een knuffel, een handdruk of een andere vorm van affectie. De revolutionaire robot Kaspar helpt de autistische kinderen nu beter om te gaan met hun emoties. Bij het vierjarig autistisch kindje Eden Sawczenko was het resultaat verbluffend, want met haar mechanisch vriendje Kaspar deelt ze wel volop haar emoties.
© ap
Robots zijn veel geschikter voor autistische kindjes omdat ze minder signalen moeten opvangen. Bovendien zijn ze heel voorspelbaar.
Ben Robins
© ap
Dokter Ben Robins en zijn team hebben het unieke project gelanceerd in de universiteit van Hertfordshire in het Engelse Hatfield. Autistische kinderen spelen er een tiental minuten met robot Kaspar, samen met een onderzoeker die de robot bestuurt via een afstandsbediening. Kaspar kan onder meer glimlachen, lachen, knipogen en met zijn armen wuiven. Prijskaartje van de revolutionaire robot: zo'n 1.300 pond (ongever 1.500 euro).
Expressies
"Kinderen met autisme reageren niet zoals het hoort op mensen omdat ze de expressies in hun aangezicht niet begrijpen", legt Ben Robins uit. "Robots zijn veel geschikter voor hen omdat ze minder signalen moeten opvangen. Bovendien zijn ze heel voorspelbaar." Er zijn gelijkaardige projecten in Canada, Japan en de VS, maar dit project heeft veruit de grootste vorderingen gemaakt.
Spectaculaire ommekeer
Neem het geval van Eden Sawczenko. Het vierjarige autistische meisje trok zich altijd terug in haar schulp als andere meisjes haar handje vasthielden. Als ze een knuffel kreeg, verstijfde ze helemaal van angst. Sinds ze begon te spelen met Kaspar, heeft ze er totaal geen probleem meer mee om mensen te knuffelen. "Ze toont nu veel meer affectie tegenover haar vrienden en vriendinnen. Ze begint nu soms zelf iemand te omarmen", glundert Claire Sawczenko, de moeder van Eden over de spectaculaire ommekeer. (kh)
(HLN)
Robot leert autistische kindjes om te gaan met emoties

© ap
Autistische kinderen hebben het moeilijk om hun emoties te uiten. Vaak reageren ze afwijzend op een knuffel, een handdruk of een andere vorm van affectie. De revolutionaire robot Kaspar helpt de autistische kinderen nu beter om te gaan met hun emoties. Bij het vierjarig autistisch kindje Eden Sawczenko was het resultaat verbluffend, want met haar mechanisch vriendje Kaspar deelt ze wel volop haar emoties.

© ap
Robots zijn veel geschikter voor autistische kindjes omdat ze minder signalen moeten opvangen. Bovendien zijn ze heel voorspelbaar.
Ben Robins

© ap
Dokter Ben Robins en zijn team hebben het unieke project gelanceerd in de universiteit van Hertfordshire in het Engelse Hatfield. Autistische kinderen spelen er een tiental minuten met robot Kaspar, samen met een onderzoeker die de robot bestuurt via een afstandsbediening. Kaspar kan onder meer glimlachen, lachen, knipogen en met zijn armen wuiven. Prijskaartje van de revolutionaire robot: zo'n 1.300 pond (ongever 1.500 euro).
Expressies
"Kinderen met autisme reageren niet zoals het hoort op mensen omdat ze de expressies in hun aangezicht niet begrijpen", legt Ben Robins uit. "Robots zijn veel geschikter voor hen omdat ze minder signalen moeten opvangen. Bovendien zijn ze heel voorspelbaar." Er zijn gelijkaardige projecten in Canada, Japan en de VS, maar dit project heeft veruit de grootste vorderingen gemaakt.
Spectaculaire ommekeer
Neem het geval van Eden Sawczenko. Het vierjarige autistische meisje trok zich altijd terug in haar schulp als andere meisjes haar handje vasthielden. Als ze een knuffel kreeg, verstijfde ze helemaal van angst. Sinds ze begon te spelen met Kaspar, heeft ze er totaal geen probleem meer mee om mensen te knuffelen. "Ze toont nu veel meer affectie tegenover haar vrienden en vriendinnen. Ze begint nu soms zelf iemand te omarmen", glundert Claire Sawczenko, de moeder van Eden over de spectaculaire ommekeer. (kh)


(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
08-03-2011
Nieuwe robot nauwelijks van mens te onderscheiden
AMSTERDAM Japanse wetenschappers hebben een robot ontwikkeld die op het eerste gezicht niet van mensen is te onderscheiden.
Geminoid DK Fotoserie video De robot met de naam Geminoid DK kan gezichsuitdrukkingen van mensen tot in de perfectie imiteren en lijkt echt te ademen. Dat meldt het Amerikaanse tijdschrift Time.
Het apparaat is een kopie van de Deense wetenschapper Henrik Scharfe, die werkzaam is aan de Universiteit van Aalborg. Onderzoekers van het Japanse bedrijf Kokoro ontwikkelden de robot voor het laboratorium van Scharfe.
Bewegingen
De Japanners hebben de robot laagje voor laagje opgebouwd om het uiterlijk zo menselijk mogelijk te maken. Ze hebben zich tot doel gesteld om uiteindelijk een robot te bouwen die niet van mensen te onderscheiden is. Bij Geminoid DK is dat al aardig gelukt.
De bewegingen van het apparaat worden op afstand aangestuurd door de computer. Deze computer staat ook in verbinding met een echt mens, zodat de bewegingen van deze persoon kunnen worden overgenomen door de robot.
Scharfe heeft onlangs de eerste tests met zijn robotdubbelganger bekeken. Maar het duurt nog even voordat zijn onderzoek met het apparaat kan beginnen.
Ik ga over een paar weken weken terug naar Japan om nog een keer te helpen met enkele experimenten, aldus Scharfe. Daarna gaat de robot naar Denemarken.
© NU.nl/Dennis Rijnvis
Klik hier voor foto's en video
(nu.nl)
Nieuwe robot nauwelijks van mens te onderscheiden
AMSTERDAM Japanse wetenschappers hebben een robot ontwikkeld die op het eerste gezicht niet van mensen is te onderscheiden.
Geminoid DK Fotoserie video De robot met de naam Geminoid DK kan gezichsuitdrukkingen van mensen tot in de perfectie imiteren en lijkt echt te ademen. Dat meldt het Amerikaanse tijdschrift Time.
Het apparaat is een kopie van de Deense wetenschapper Henrik Scharfe, die werkzaam is aan de Universiteit van Aalborg. Onderzoekers van het Japanse bedrijf Kokoro ontwikkelden de robot voor het laboratorium van Scharfe.
Bewegingen
De Japanners hebben de robot laagje voor laagje opgebouwd om het uiterlijk zo menselijk mogelijk te maken. Ze hebben zich tot doel gesteld om uiteindelijk een robot te bouwen die niet van mensen te onderscheiden is. Bij Geminoid DK is dat al aardig gelukt.
De bewegingen van het apparaat worden op afstand aangestuurd door de computer. Deze computer staat ook in verbinding met een echt mens, zodat de bewegingen van deze persoon kunnen worden overgenomen door de robot.
Scharfe heeft onlangs de eerste tests met zijn robotdubbelganger bekeken. Maar het duurt nog even voordat zijn onderzoek met het apparaat kan beginnen.
Ik ga over een paar weken weken terug naar Japan om nog een keer te helpen met enkele experimenten, aldus Scharfe. Daarna gaat de robot naar Denemarken.
© NU.nl/Dennis Rijnvis
Klik hier voor foto's en video
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
28-03-2011
Robotmeeuw is net echt
Wetenschappers hebben een robotmeeuw gemaakt die zeer natuurgetrouw kan vliegen. De spanwijdte is bijna twee meter en de robovogel weegt ongeveer een halve kilo.
De vleugelslag en staartbewegingen zijn nagebootst van echte vogels. De vlerken kantelen bij elke slag zoals biologische vleugels dat ook doen. Dat schrijft website Bright.nl.
Het Duitse bedrijf Festo’s Bionic Learning Network specialiseert zich in het automatiseren van principes uit de natuur voor nieuwe technische toepassingen. Het bedrijf maakte ook een bionische olifantenslurf, een soort penquïnzeppelin en een vliegende kwal.
(depers.nl)
Robotmeeuw is net echt

Wetenschappers hebben een robotmeeuw gemaakt die zeer natuurgetrouw kan vliegen. De spanwijdte is bijna twee meter en de robovogel weegt ongeveer een halve kilo.
De vleugelslag en staartbewegingen zijn nagebootst van echte vogels. De vlerken kantelen bij elke slag zoals biologische vleugels dat ook doen. Dat schrijft website Bright.nl.
Het Duitse bedrijf Festo’s Bionic Learning Network specialiseert zich in het automatiseren van principes uit de natuur voor nieuwe technische toepassingen. Het bedrijf maakte ook een bionische olifantenslurf, een soort penquïnzeppelin en een vliegende kwal.

(depers.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
17-04-2011
"Robots zullen radioactiviteit rond Fukushima bedwingen"
© epa
Zes tot negen maanden zal het duren vooraleer de reactoren in de vernielde Japanse kerncentrale van Fukushima gestabiliseerd zijn. Dat beweert althans Tepco, de uitbater van de centrale. De Japanse premier Naoto Kan had de elektriciteitsproducent gevraagd een tijdsplan voor te leggen voor het afhandelen van de nucleaire ramp.
Ongeveer drie maanden zouden nodig zijn vooraleer het stralingsniveau begint te dalen. Tussen de zes en de negen maanden zou het duren om de reactoren gekoeld te krijgen.
Tepco zet intussen vanop afstand bestuurde robotten in, om in reactor 3 van Fukushima de stralingsdosis, de temperatuur en de zuurstofconcentratie te meten. Het bedrijf wil er zeker van zijn dat werknemers opnieuw het reactorgebouw kunnen betreden. De robotten moeten erachter komen wat nodig is om de reactor opnieuw onder controle te brengen. Wellicht zullen ook de reactoren 1 en 2 met robotten onderzocht worden.
De VS hebben de robotten ter beschikking gesteld. De Amerikaanse minister van Buitenlandse Zaken Hillary Clinton verzekerde haar Japanse ambtgenoot vandaag in Tokio nog eens van de steun van de VS. Washington zal alles doen om Japan bij de atoomcrisis te helpen, luidde het. (afp/adb)
(HLN)
"Robots zullen radioactiviteit rond Fukushima bedwingen"

© epa
Zes tot negen maanden zal het duren vooraleer de reactoren in de vernielde Japanse kerncentrale van Fukushima gestabiliseerd zijn. Dat beweert althans Tepco, de uitbater van de centrale. De Japanse premier Naoto Kan had de elektriciteitsproducent gevraagd een tijdsplan voor te leggen voor het afhandelen van de nucleaire ramp.
Ongeveer drie maanden zouden nodig zijn vooraleer het stralingsniveau begint te dalen. Tussen de zes en de negen maanden zou het duren om de reactoren gekoeld te krijgen.
Tepco zet intussen vanop afstand bestuurde robotten in, om in reactor 3 van Fukushima de stralingsdosis, de temperatuur en de zuurstofconcentratie te meten. Het bedrijf wil er zeker van zijn dat werknemers opnieuw het reactorgebouw kunnen betreden. De robotten moeten erachter komen wat nodig is om de reactor opnieuw onder controle te brengen. Wellicht zullen ook de reactoren 1 en 2 met robotten onderzocht worden.
De VS hebben de robotten ter beschikking gesteld. De Amerikaanse minister van Buitenlandse Zaken Hillary Clinton verzekerde haar Japanse ambtgenoot vandaag in Tokio nog eens van de steun van de VS. Washington zal alles doen om Japan bij de atoomcrisis te helpen, luidde het. (afp/adb)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
21-04-2011
Onderwaterrobots zoeken tsunamislachtoffers
TOKIO - Japan heeft twee onderwaterrobots ingezet voor de zoektocht naar slachtoffers van de tsunami anderhalve maand geleden in het noordoosten van het land. Dat hebben Japanse functionarissen donderdag gemeld.
© Getty Images
De onderwaterrobots, uitgerust met sonar en videocamera's, worden beheerd door een Amerikaans-Japans team.
De robots hebben de afgelopen dagen bij de gehavende vissersstad Minami Sanrikucho gezocht naar stoffelijke overschotten die door de tsunami in zee zijn gesleept. Tot nu toe zijn er geen lijken gevonden.
Door de zware aardbeving met een kracht van 9,0 op de schaal van Richter en de tsunami van 11 maart zijn meer dan 27.000 mensen omgekomen of vermist geraakt. Ook dreigde een nucleaire catastrofe door een beschadigde kerncentrale.
In Minami Sanrikucho, met 18.000 inwoners, kwamen 450 mensen om het leven. Circa 640 mensen zijn vermist. Bijna vierduizend woningen werden weggevaagd.
Het noordoosten van Japan werd woensdag opnieuw opgeschrikt door een serie aardbevingen. De zwaarste beving had een kracht van 6,1. Het epicentrum lag 60 kilometer ten oosten van Tokio.
Alles over de tsunami en de aardbeving in Japan
© ANP
(nu.nl)
Onderwaterrobots zoeken tsunamislachtoffers
TOKIO - Japan heeft twee onderwaterrobots ingezet voor de zoektocht naar slachtoffers van de tsunami anderhalve maand geleden in het noordoosten van het land. Dat hebben Japanse functionarissen donderdag gemeld.

© Getty Images
De onderwaterrobots, uitgerust met sonar en videocamera's, worden beheerd door een Amerikaans-Japans team.
De robots hebben de afgelopen dagen bij de gehavende vissersstad Minami Sanrikucho gezocht naar stoffelijke overschotten die door de tsunami in zee zijn gesleept. Tot nu toe zijn er geen lijken gevonden.
Door de zware aardbeving met een kracht van 9,0 op de schaal van Richter en de tsunami van 11 maart zijn meer dan 27.000 mensen omgekomen of vermist geraakt. Ook dreigde een nucleaire catastrofe door een beschadigde kerncentrale.
In Minami Sanrikucho, met 18.000 inwoners, kwamen 450 mensen om het leven. Circa 640 mensen zijn vermist. Bijna vierduizend woningen werden weggevaagd.
Het noordoosten van Japan werd woensdag opnieuw opgeschrikt door een serie aardbevingen. De zwaarste beving had een kracht van 6,1. Het epicentrum lag 60 kilometer ten oosten van Tokio.
Alles over de tsunami en de aardbeving in Japan
© ANP
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
04-05-2011
Voedsel delen met robots
Bewijs voor genetisch altruïsme
De regel van Hamilton: voor familie offer je je eerder op dan voor vreemden. Robots bewijzen het nu. Als die zich evolutionair ontwikkelen, worden ze op een gegeven moment vanzelf opofferingsgezind. Een mooie ontdekking, maar is het onderzoek wel goed gedaan?
Je helpt je familie eerder dan dat een vreemde mevrouw op straat. Dat is logisch, het is immers je familie. Je kent ze en je geeft om ze. In de jaren zestig zei William Hamilton dat dit idee zelfs evolutionair bestaat: je offert je op voor je familie, omdat jou genen, die ook in je broers en zussen zitten, dan in ieder geval blijven bestaan. Maar onlangs is er nogal wat reuring ontstaan over dat idee. Heeft Hamilton nu gelijk of niet? Wel, zeggen Zwitserse wetenschappers nu. Ze hebben het getest, met robots.
Robotevolutie
Waarom met robots? Het evolutionair altruïsme moet langzaam ontstaan binnen de soort. Heel erg langzaam. Het is praktisch onmogelijk om zoveel generaties achter elkaar een gemeenschap van dieren te bekijken. Maar robots, die draaien op programma's. En dankzij genetische algoritmes, computerprogramma's die de evolutie nabootsen door willekeurig delen van het programma te veranderen, kan je de ontwikkeling van een soort in no-time nabootsen.
En dat is dus ook wat Markus Waibel, Dario Floreano en Laurent Keller deden. Ze simuleerden een situatie uit de natuur, door robots kleine blokjes te laten vinden die voedsel voor moesten stellen. 'We begonnen met robots die zomaar wat deden. In de loop van de vijfhonderd generaties werden ze steeds slimmer. Aan het einde konden ze voedsel herkennen, oppakken en transporteren naar hun nest, zonder fouten te maken.' vertelt Waibel. En ze deelden dus ook voedsel met hun familieleden.
Delen met je broertjes
Die familieleden van de robots werden gecreëerd door de 'genen' van de robotjes aan te passen. Robots hebben natuurlijk geen genen, maar door het programma waarop de robots liepen aan te passen, konden robots wel meer op elkaar lijken. 'We maakten klonen, die precies hetzelfde programma hadden. Ook maakten we broertjes en zusjes van robotten, door het programma wel aan te passen, maar ook voor een groot deel overeen te laten komen. En er waren complete vreemden, die niets aan overeenkomst hadden met andere robots.'
Door zulke familiebanden in te bouwen werd het mogelijk om het altruïsme te onderzoeken. Robots kregen, nadat ze voedsel hadden verzameld, de optie om het voedsel te delen, of zelf te houden. En ja hoor, na vijfhonderd generaties, toen er genoeg tijd voorbij was om te evolueren, vertoonden de robotjes tekenen van altruïsme. 'Het onderzoek toont aan dat altruïsme niet, zoals nog wel eens gedacht wordt, altijd in één specifiek gen aanwezig hoeft te zijn. Onze robots hadden een heel simpel genetisch profiel en ontwikkelden toch altruïsme,' aldus Waibel.
Goed onderzoek?
Hoewel er nu dus, in een simulatie van de natuur, is ontdekt dat Hamilton's regel klopt, zullen er vast nog wel discussies blijven bestaan. De familie-robotjes werden bij het onderzoek bijvoorbeeld allemaal in dezelfde groep gestopt, waarin geen niet-familie aanwezig was. Het is dus onbekend hoe de robots die altruïsme kennen, zouden reageren op vreemden.
Collega’s van andere universiteiten hebben ook nogal wat kritiek op het onderzoek. De manier waarop het onderzoek was ontworpen deugt niet, en de instelling van de wetenschappers zou bevooroordeeld zijn. En het gebruik van robots is niets meer dan een cool dingetje, dat niets toevoegt aan het onderzoek. Normaal gesproken word dergelijk onderzoek met genetische algoritmes gewoon met simulaties op een computer gedaan, en dat werkt net zo goed.
Dus een onomstotelijk bewijs voor Hamilton’s regel, dat is dit onderzoek helaas niet. Of altruïsme inderdaad in de genen zit, en speciaal voor familie geldt, daar zal dan ook nog lang over worden gekibbeld.
Marc Seijlhouwer
(Noorderlicht)
Voedsel delen met robots
Bewijs voor genetisch altruïsme
De regel van Hamilton: voor familie offer je je eerder op dan voor vreemden. Robots bewijzen het nu. Als die zich evolutionair ontwikkelen, worden ze op een gegeven moment vanzelf opofferingsgezind. Een mooie ontdekking, maar is het onderzoek wel goed gedaan?
Je helpt je familie eerder dan dat een vreemde mevrouw op straat. Dat is logisch, het is immers je familie. Je kent ze en je geeft om ze. In de jaren zestig zei William Hamilton dat dit idee zelfs evolutionair bestaat: je offert je op voor je familie, omdat jou genen, die ook in je broers en zussen zitten, dan in ieder geval blijven bestaan. Maar onlangs is er nogal wat reuring ontstaan over dat idee. Heeft Hamilton nu gelijk of niet? Wel, zeggen Zwitserse wetenschappers nu. Ze hebben het getest, met robots.
Robotevolutie
Waarom met robots? Het evolutionair altruïsme moet langzaam ontstaan binnen de soort. Heel erg langzaam. Het is praktisch onmogelijk om zoveel generaties achter elkaar een gemeenschap van dieren te bekijken. Maar robots, die draaien op programma's. En dankzij genetische algoritmes, computerprogramma's die de evolutie nabootsen door willekeurig delen van het programma te veranderen, kan je de ontwikkeling van een soort in no-time nabootsen.
En dat is dus ook wat Markus Waibel, Dario Floreano en Laurent Keller deden. Ze simuleerden een situatie uit de natuur, door robots kleine blokjes te laten vinden die voedsel voor moesten stellen. 'We begonnen met robots die zomaar wat deden. In de loop van de vijfhonderd generaties werden ze steeds slimmer. Aan het einde konden ze voedsel herkennen, oppakken en transporteren naar hun nest, zonder fouten te maken.' vertelt Waibel. En ze deelden dus ook voedsel met hun familieleden.
Delen met je broertjes
Die familieleden van de robots werden gecreëerd door de 'genen' van de robotjes aan te passen. Robots hebben natuurlijk geen genen, maar door het programma waarop de robots liepen aan te passen, konden robots wel meer op elkaar lijken. 'We maakten klonen, die precies hetzelfde programma hadden. Ook maakten we broertjes en zusjes van robotten, door het programma wel aan te passen, maar ook voor een groot deel overeen te laten komen. En er waren complete vreemden, die niets aan overeenkomst hadden met andere robots.'
Door zulke familiebanden in te bouwen werd het mogelijk om het altruïsme te onderzoeken. Robots kregen, nadat ze voedsel hadden verzameld, de optie om het voedsel te delen, of zelf te houden. En ja hoor, na vijfhonderd generaties, toen er genoeg tijd voorbij was om te evolueren, vertoonden de robotjes tekenen van altruïsme. 'Het onderzoek toont aan dat altruïsme niet, zoals nog wel eens gedacht wordt, altijd in één specifiek gen aanwezig hoeft te zijn. Onze robots hadden een heel simpel genetisch profiel en ontwikkelden toch altruïsme,' aldus Waibel.
Goed onderzoek?
Hoewel er nu dus, in een simulatie van de natuur, is ontdekt dat Hamilton's regel klopt, zullen er vast nog wel discussies blijven bestaan. De familie-robotjes werden bij het onderzoek bijvoorbeeld allemaal in dezelfde groep gestopt, waarin geen niet-familie aanwezig was. Het is dus onbekend hoe de robots die altruïsme kennen, zouden reageren op vreemden.
Collega’s van andere universiteiten hebben ook nogal wat kritiek op het onderzoek. De manier waarop het onderzoek was ontworpen deugt niet, en de instelling van de wetenschappers zou bevooroordeeld zijn. En het gebruik van robots is niets meer dan een cool dingetje, dat niets toevoegt aan het onderzoek. Normaal gesproken word dergelijk onderzoek met genetische algoritmes gewoon met simulaties op een computer gedaan, en dat werkt net zo goed.
Dus een onomstotelijk bewijs voor Hamilton’s regel, dat is dit onderzoek helaas niet. Of altruïsme inderdaad in de genen zit, en speciaal voor familie geldt, daar zal dan ook nog lang over worden gekibbeld.
Marc Seijlhouwer
(Noorderlicht)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
18-05-2011
'Robots creëren eigen taal'
AMSTERDAM – Australische wetenschappers hebben twee robots ontwikkeld die een eigen spreektaal kunnen creëren.
© Thinkstock
De robots – genaamd Lingodroids –hebben het vermogen om zelf woorden te verzinnen voor nieuwe plekken ze bezoeken. De woorden die ze zichzelf aanleren gebruiken ze in conversaties met elkaar en worden opgeslagen in hun geheugen.
Dat meldt nieuwssite Physorg.com op basis van een onderzoek van wetenschappers aan de Universiteit van Queensland.
Microfoon
De robots zijn opgebouwd uit een rijdend platform, een camera en een sonar waarmee ze hun omgeving in kaart brengen. Ook beschikken de apparaten over een microfoon en luidspreker, zodat ze met elkaar kunnen ‘praten’.
Volgens hoofdonderzoeker Ruth Schulz ontwikkelen de robots hun taal op dezelfde manier zoals menselijke talen waarschijnlijk zijn ontstaan. De apparaten bezoeken een plaats, verzinnen een willekeurige combinatie van syllaben voor die plek en delen dat nieuwe woord vervolgens met elkaar.
Objecten
De robots trainen hun woordenschat door spellen met elkaar te spelen. Eén van de apparaten zegt bijvoorbeeld het woord 'kurzo' en vervolgens racen beide robots naar plek die volgens hen bij dat woord hoort.
Op dit moment kunnen de Lingodroids alleen nog woorden koppelen aan locaties, maar het is de bedoeling dat nieuwe versies van de apparaten in de toekomst ook namen voor objecten gaan verzinnen om zo een complexere taal te creeëren.
© NU.nl/Dennis Rijnvis
(nu.nl)
'Robots creëren eigen taal'
AMSTERDAM – Australische wetenschappers hebben twee robots ontwikkeld die een eigen spreektaal kunnen creëren.

© Thinkstock
De robots – genaamd Lingodroids –hebben het vermogen om zelf woorden te verzinnen voor nieuwe plekken ze bezoeken. De woorden die ze zichzelf aanleren gebruiken ze in conversaties met elkaar en worden opgeslagen in hun geheugen.
Dat meldt nieuwssite Physorg.com op basis van een onderzoek van wetenschappers aan de Universiteit van Queensland.
Microfoon
De robots zijn opgebouwd uit een rijdend platform, een camera en een sonar waarmee ze hun omgeving in kaart brengen. Ook beschikken de apparaten over een microfoon en luidspreker, zodat ze met elkaar kunnen ‘praten’.
Volgens hoofdonderzoeker Ruth Schulz ontwikkelen de robots hun taal op dezelfde manier zoals menselijke talen waarschijnlijk zijn ontstaan. De apparaten bezoeken een plaats, verzinnen een willekeurige combinatie van syllaben voor die plek en delen dat nieuwe woord vervolgens met elkaar.
Objecten
De robots trainen hun woordenschat door spellen met elkaar te spelen. Eén van de apparaten zegt bijvoorbeeld het woord 'kurzo' en vervolgens racen beide robots naar plek die volgens hen bij dat woord hoort.
Op dit moment kunnen de Lingodroids alleen nog woorden koppelen aan locaties, maar het is de bedoeling dat nieuwe versies van de apparaten in de toekomst ook namen voor objecten gaan verzinnen om zo een complexere taal te creeëren.
© NU.nl/Dennis Rijnvis
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
02-07-2011
Duitse wetenschappers geven robot aanraakgevoelige huid
Duitse onderzoekers hebben sensors voor robots ontwikkeld die als kunstmatige huid dienst kunnen doen. De kunstmatige huid bestaat uit een aantal verschillende typen sensors waarmee een robot zou kunnen 'voelen'.
De medewerkers van het Institute for Cognitive Systems aan de TU van München hebben hun kunstmatige huid Hex-O-Skin genoemd, naar de hexagonale pcb's waarop de sensors zijn gemonteerd. De kunstmatige huid die door onderzoekers Philipp Mittendorfer en Gordon Cheng werd ontwikkeld, bevat sensors voor temperatuur, beweging en nabijheid van objecten. Daarmee zou een robot voorzien kunnen worden van een 'huid' die aanraakgevoelig is.
De eenheden van de Hex-O-Skin zijn vijf centimeter in doorsnede en bevatten onder meer vier infrarode sensors die voor de tastzin zorgen: objecten vanaf één centimeter afstand kunnen door de sensors worden gedetecteerd. De individuele pcb's van de 'huid' worden met elkaar verbonden en zijn verpakt in een elastomeer dat mechanische huideigenschappen simuleert. Elk pcb heeft een eigen controller die de analoge sensor-signalen naar een digitaal signaal converteert. De sensors communiceren als 'grid' met een centrale computer.
Vooralsnog hebben de onderzoekers een robot van ongeveer vijftien sensors voorzien. De Duitsers willen echter een prototype bouwen dat volledig is omsloten door de kunstmatige huid en zo een humanoïde robot ontwikkelen.
(Tweakers.net)
Duitse wetenschappers geven robot aanraakgevoelige huid
Duitse onderzoekers hebben sensors voor robots ontwikkeld die als kunstmatige huid dienst kunnen doen. De kunstmatige huid bestaat uit een aantal verschillende typen sensors waarmee een robot zou kunnen 'voelen'.
De medewerkers van het Institute for Cognitive Systems aan de TU van München hebben hun kunstmatige huid Hex-O-Skin genoemd, naar de hexagonale pcb's waarop de sensors zijn gemonteerd. De kunstmatige huid die door onderzoekers Philipp Mittendorfer en Gordon Cheng werd ontwikkeld, bevat sensors voor temperatuur, beweging en nabijheid van objecten. Daarmee zou een robot voorzien kunnen worden van een 'huid' die aanraakgevoelig is.

De eenheden van de Hex-O-Skin zijn vijf centimeter in doorsnede en bevatten onder meer vier infrarode sensors die voor de tastzin zorgen: objecten vanaf één centimeter afstand kunnen door de sensors worden gedetecteerd. De individuele pcb's van de 'huid' worden met elkaar verbonden en zijn verpakt in een elastomeer dat mechanische huideigenschappen simuleert. Elk pcb heeft een eigen controller die de analoge sensor-signalen naar een digitaal signaal converteert. De sensors communiceren als 'grid' met een centrale computer.

Vooralsnog hebben de onderzoekers een robot van ongeveer vijftien sensors voorzien. De Duitsers willen echter een prototype bouwen dat volledig is omsloten door de kunstmatige huid en zo een humanoïde robot ontwikkelen.
(Tweakers.net)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...


19-08-2011
Robottactiek: samen sta je sterk
Ieder zo zijn eigen specialiteit, dat is de gedachte achter ‘Swarmanoid’. De groep robots bestaat uit verkenners, vervoerders en grijpers, en door goed samen te werken bereiken ze hun doel. Afgelopen week werd een video van het project beloond met een prijs.
Ook in de wereld van de kunstmatige intelligentie (AI) is er een Oscar te verdienen voor de beste film. De ‘Association for the Advancement of Artificial Intelligence’ (AAAI) beloont in haar Video Competition de korte video die het best een wetenschappelijk AI-project leuk in beeld brengt.
Dit jaar ging de prijs naar ‘Swarmanoid’, een Europees project vastgelegd door Marco Dorigo van de Vrije Universiteit van Brussel. De ‘zwerm’ robots (vandaar de naam Swarmanoid) bestaat uit drie typen apparaten met elk hun eigen taak. Een goede samenwerking zorgt ervoor dat ze hun doel bereiken. In het winnende filmpje verenigen ze hun krachten om een boek uit de kast te pakken (zie hieronder).
Kleurige lichtjes
Zoals je in het filmpje ziet, geven de robots licht. Dat is niet gewoon voor het mooi, maar voor de communicatie. De bots versturen informatie naar elkaar via lichtsignalen. De ringen met leds die elke robot heeft, kan 256 kleuren aannemen. Hiermee kunnen ze boodschappen coderen en doorgeven.
Op elkaar aangewezen
Het oorspronkelijke systeem bestond uit twee typen robots: de vliegende ‘eye-bots’ en de rollende ‘foot-bots’. De eye-bots verkennen de omgeving. Ze hebben daarvoor een camera en sensoren om hun locatie te bepalen aan boord.
Ze vliegen niet voortdurend rond: op een bepaald moment bevestigen ze zich aan het plafond door middel van een magneet (het plafond moet dus ferromagnetisch zijn). De bots verdelen zich zo over de ruimte, dat de hele omgeving afgedekt is. Het vastplakken – in plaats van rondcirkelen – spaart een hoop energie, ook al heb je nu misschien meer bots nodig.
Wanneer de eye-bots eenmaal op hun plaats zitten, is het de beurt aan de foot-bots. Deze apparaten verplaatsen zich met wieltjes over de grond. Het is hun taak om de doellocatie te bereiken, maar zij hebben hiervoor geen route-informatie. Daar moeten de eye-bots voor zorgen: die houden alles in de gaten en sturen de foot-bots de goede kant op.
Links staat de foot-bot. De opstaande doorzichtige koker bevat een camera om de eye-bots te kunnen waarnemen. Rechts zie je het binnenwerk van de eye-bot met bovenin de grijper waarmee het zich bevestigd aan het plafond. Afbeelding: © Swarmanoid project
.Het samenspel tussen de eye-bots en foot-bots noemen de onderzoekers mutual adaptation, oftewel “wederzijdse aanpassing”. Enerzijds voeren de foot-bots instructies van de eye-bots uit, anderzijds passen de eye-bots hun instructies aan wat de foot-bots doen aan. Als een robot op de grond bijvoorbeeld de verkeerde kant op dreigt te rijden, zullen de vliegende bots de route-informatie daarop aanpassen.
Via via
Het communiceren via een medium (de broodkruimeltjes bij Klein Duimpje, de feromonen bij mieren en de eye-bots bij Swarmanoid) heet stigmergie. Omdat de samenwerking bij Swarmanoid gebaseerd is op stigmergie, noemen de onderzoekers hun aanpak “cooperative stigmergic navigation”.
Klein Duimpje en mieren
In feite fungeren de eye-bots als ‘broodkruimels’ voor de bots op de grond. De foot-bots slaan hun ervaringen op in de eye-bots (als route-informatie), zodat een andere foot-bot die kennis weer kan benutten. Net zoals Klein Duimpje route-informatie achterlaat met broodkruimeltjes.
Of net als mieren, want ook zij geven informatie aan elkaar door via het achterlaten van een spoor. In eerste instantie gaat elke mier willekeurig op zoek naar voedsel, maar als hij iets lekkers vindt, laat hij op de terugweg een geurstof achter op het pad. In het vervolg hoeven mieren dan slechts het pad te kiezen dat het sterkst ruikt om bij goed voedsel te komen.
De rol van het geurspoor wordt duidelijk in deze illustratie. In situatie 1 is er niets aan de hand: de mieren lopen rechtstreeks over het spoor van A naar B. Er ontstaat een probleem wanneer er in de tweede situatie een obstakel het spoort blokkeert. De mieren zullen dan willekeurig links of rechts kiezen, maar omdat de rechterroute korter is, zal deze vaker gebruikt worden (mieren gaan altijd over hetzelfde pad terug, dus de mieren over rechts zijn snel heen en weer). Doordat het rechterpad vaker gebruikt wordt, zal het geurspoor daar ook sterker zijn. Hierdoor kiezen steeds meer mieren voor dit pad en zo ontstaat uiteindelijk situatie 3. Afbeelding: © Zhong et al., 2008
Het mierenprincipe is populair in de kunstmatige intelligentie omdat het een goede methode is voor het optimaliseren van een route. In een draadloos sensornetwerk kunnen bijvoorbeeld ‘kunstmatige mieren’ worden ingezet om gunstige routes te bepalen. Dat zijn dan lege pakketjes ‘informatie’ die puur heen en weer gestuurd worden om route-informatie te verzamelen en op te slaan in sensor nodes.
Klimmen met één hand
Met behulp van de eye-bots vinden de foot-bots dus hun weg, maar daarmee is het boek nog niet uit de kast. Om objecten te kunnen pakken, is een derde type robot nodig: de hand-bot. Dit apparaat heeft twee mechanische armen en een touw, waardoor de robot niet alleen kan grijpen, maar ook klimmen. Wanneer de bot omhoog wil, lanceert de bot het touw naar het plafond, waar het blijft zitten door (wederom) een magneet. Nu heeft de robot de armen vrij om zich te verplaatsen en tegelijk iets te pakken.
Hoewel de hand-bot multifunctioneel is, kan het ook iets belangrijks níet: zich verplaatsen over de grond. De foot-bot is daarom zo gemaakt dat het zich kan koppelen aan een hand-bot.
De hand-bot in het midden is gekoppeld aan drie foot-bots. Zij zullen de grijp-robot naar het object vervoeren. Afbeelding: © Swarmanoid project
Wanneer bij de uitvoering van een taak blijkt dat een hand-bot nodig is, voegen foot-bots zich bij een hand-bot, zetten ze zich vast en brengen ze de hand-bot naar de bestemming. Deze aanpak heet ook wel self-assembly: de robots bepalen zelf wanneer en waaraan ze zich koppelen.
Van boek-pakker tot reddingswerker
Robotsystemen zijn er inmiddels in alle soorten en maten. Toch heeft Swarmanoid een aantal bijzondere eigenschappen. Zo is de combinatie van klimmen en grijpen vrij uniek. De bestaande robots die daartoe in staat zijn, zijn relatief groot en die kunnen niet zomaar een boekenkast in. Daarnaast is Swarmanoid een van de weinige systemen dat zwermen van verschillende typen robots met elkaar laat samenwerken.
Swarmanoid vormt wellicht de basis voor toekomstige robotsystemen voor reddingsoperaties. De eye-bots kunnen zelfstandig een onbekende omgeving in kaart brengen, zoals een huis dat in brand staat. Vervolgens kunnen foot-bots samen met hand-bots brandblussers naar binnen rijden en bedienen. Het filmpje heeft laten zien dat zoiets ooit mogelijk moet zijn.
Bronnen
•Ducatelleet al., ‘Cooperative Self-Organization in a Heterogeneous Swarm Robotic System’ (pdf-bestand), In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO), 2010
•Ducatelle et al., [‘Cooperative Stigmergic Navigation in a Heterogeneous Robotic Swarm’ (pdf-bestand), In Proceedings of the 11th International Conference on Simulation of Adaptive Behavior (SAB), 2010
•Zhong et al., ‘An Ant Colony Optimization Competition Routing Algorithm for WSN’, 4th International Conference on Wireless Communications, Networking and Mobile Computing, pp.1-4, 12-14 Oct. 2008. doi: 10.1109/WiCom.2008.932
(Kennislink)
Robottactiek: samen sta je sterk
Ieder zo zijn eigen specialiteit, dat is de gedachte achter ‘Swarmanoid’. De groep robots bestaat uit verkenners, vervoerders en grijpers, en door goed samen te werken bereiken ze hun doel. Afgelopen week werd een video van het project beloond met een prijs.
Ook in de wereld van de kunstmatige intelligentie (AI) is er een Oscar te verdienen voor de beste film. De ‘Association for the Advancement of Artificial Intelligence’ (AAAI) beloont in haar Video Competition de korte video die het best een wetenschappelijk AI-project leuk in beeld brengt.
Dit jaar ging de prijs naar ‘Swarmanoid’, een Europees project vastgelegd door Marco Dorigo van de Vrije Universiteit van Brussel. De ‘zwerm’ robots (vandaar de naam Swarmanoid) bestaat uit drie typen apparaten met elk hun eigen taak. Een goede samenwerking zorgt ervoor dat ze hun doel bereiken. In het winnende filmpje verenigen ze hun krachten om een boek uit de kast te pakken (zie hieronder).

Kleurige lichtjes
Zoals je in het filmpje ziet, geven de robots licht. Dat is niet gewoon voor het mooi, maar voor de communicatie. De bots versturen informatie naar elkaar via lichtsignalen. De ringen met leds die elke robot heeft, kan 256 kleuren aannemen. Hiermee kunnen ze boodschappen coderen en doorgeven.
Op elkaar aangewezen
Het oorspronkelijke systeem bestond uit twee typen robots: de vliegende ‘eye-bots’ en de rollende ‘foot-bots’. De eye-bots verkennen de omgeving. Ze hebben daarvoor een camera en sensoren om hun locatie te bepalen aan boord.
Ze vliegen niet voortdurend rond: op een bepaald moment bevestigen ze zich aan het plafond door middel van een magneet (het plafond moet dus ferromagnetisch zijn). De bots verdelen zich zo over de ruimte, dat de hele omgeving afgedekt is. Het vastplakken – in plaats van rondcirkelen – spaart een hoop energie, ook al heb je nu misschien meer bots nodig.
Wanneer de eye-bots eenmaal op hun plaats zitten, is het de beurt aan de foot-bots. Deze apparaten verplaatsen zich met wieltjes over de grond. Het is hun taak om de doellocatie te bereiken, maar zij hebben hiervoor geen route-informatie. Daar moeten de eye-bots voor zorgen: die houden alles in de gaten en sturen de foot-bots de goede kant op.

Links staat de foot-bot. De opstaande doorzichtige koker bevat een camera om de eye-bots te kunnen waarnemen. Rechts zie je het binnenwerk van de eye-bot met bovenin de grijper waarmee het zich bevestigd aan het plafond. Afbeelding: © Swarmanoid project
.Het samenspel tussen de eye-bots en foot-bots noemen de onderzoekers mutual adaptation, oftewel “wederzijdse aanpassing”. Enerzijds voeren de foot-bots instructies van de eye-bots uit, anderzijds passen de eye-bots hun instructies aan wat de foot-bots doen aan. Als een robot op de grond bijvoorbeeld de verkeerde kant op dreigt te rijden, zullen de vliegende bots de route-informatie daarop aanpassen.
Via via
Het communiceren via een medium (de broodkruimeltjes bij Klein Duimpje, de feromonen bij mieren en de eye-bots bij Swarmanoid) heet stigmergie. Omdat de samenwerking bij Swarmanoid gebaseerd is op stigmergie, noemen de onderzoekers hun aanpak “cooperative stigmergic navigation”.
Klein Duimpje en mieren
In feite fungeren de eye-bots als ‘broodkruimels’ voor de bots op de grond. De foot-bots slaan hun ervaringen op in de eye-bots (als route-informatie), zodat een andere foot-bot die kennis weer kan benutten. Net zoals Klein Duimpje route-informatie achterlaat met broodkruimeltjes.
Of net als mieren, want ook zij geven informatie aan elkaar door via het achterlaten van een spoor. In eerste instantie gaat elke mier willekeurig op zoek naar voedsel, maar als hij iets lekkers vindt, laat hij op de terugweg een geurstof achter op het pad. In het vervolg hoeven mieren dan slechts het pad te kiezen dat het sterkst ruikt om bij goed voedsel te komen.

De rol van het geurspoor wordt duidelijk in deze illustratie. In situatie 1 is er niets aan de hand: de mieren lopen rechtstreeks over het spoor van A naar B. Er ontstaat een probleem wanneer er in de tweede situatie een obstakel het spoort blokkeert. De mieren zullen dan willekeurig links of rechts kiezen, maar omdat de rechterroute korter is, zal deze vaker gebruikt worden (mieren gaan altijd over hetzelfde pad terug, dus de mieren over rechts zijn snel heen en weer). Doordat het rechterpad vaker gebruikt wordt, zal het geurspoor daar ook sterker zijn. Hierdoor kiezen steeds meer mieren voor dit pad en zo ontstaat uiteindelijk situatie 3. Afbeelding: © Zhong et al., 2008
Het mierenprincipe is populair in de kunstmatige intelligentie omdat het een goede methode is voor het optimaliseren van een route. In een draadloos sensornetwerk kunnen bijvoorbeeld ‘kunstmatige mieren’ worden ingezet om gunstige routes te bepalen. Dat zijn dan lege pakketjes ‘informatie’ die puur heen en weer gestuurd worden om route-informatie te verzamelen en op te slaan in sensor nodes.
Klimmen met één hand
Met behulp van de eye-bots vinden de foot-bots dus hun weg, maar daarmee is het boek nog niet uit de kast. Om objecten te kunnen pakken, is een derde type robot nodig: de hand-bot. Dit apparaat heeft twee mechanische armen en een touw, waardoor de robot niet alleen kan grijpen, maar ook klimmen. Wanneer de bot omhoog wil, lanceert de bot het touw naar het plafond, waar het blijft zitten door (wederom) een magneet. Nu heeft de robot de armen vrij om zich te verplaatsen en tegelijk iets te pakken.

Hoewel de hand-bot multifunctioneel is, kan het ook iets belangrijks níet: zich verplaatsen over de grond. De foot-bot is daarom zo gemaakt dat het zich kan koppelen aan een hand-bot.

De hand-bot in het midden is gekoppeld aan drie foot-bots. Zij zullen de grijp-robot naar het object vervoeren. Afbeelding: © Swarmanoid project
Wanneer bij de uitvoering van een taak blijkt dat een hand-bot nodig is, voegen foot-bots zich bij een hand-bot, zetten ze zich vast en brengen ze de hand-bot naar de bestemming. Deze aanpak heet ook wel self-assembly: de robots bepalen zelf wanneer en waaraan ze zich koppelen.
Van boek-pakker tot reddingswerker
Robotsystemen zijn er inmiddels in alle soorten en maten. Toch heeft Swarmanoid een aantal bijzondere eigenschappen. Zo is de combinatie van klimmen en grijpen vrij uniek. De bestaande robots die daartoe in staat zijn, zijn relatief groot en die kunnen niet zomaar een boekenkast in. Daarnaast is Swarmanoid een van de weinige systemen dat zwermen van verschillende typen robots met elkaar laat samenwerken.
Swarmanoid vormt wellicht de basis voor toekomstige robotsystemen voor reddingsoperaties. De eye-bots kunnen zelfstandig een onbekende omgeving in kaart brengen, zoals een huis dat in brand staat. Vervolgens kunnen foot-bots samen met hand-bots brandblussers naar binnen rijden en bedienen. Het filmpje heeft laten zien dat zoiets ooit mogelijk moet zijn.
Bronnen
•Ducatelleet al., ‘Cooperative Self-Organization in a Heterogeneous Swarm Robotic System’ (pdf-bestand), In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO), 2010
•Ducatelle et al., [‘Cooperative Stigmergic Navigation in a Heterogeneous Robotic Swarm’ (pdf-bestand), In Proceedings of the 11th International Conference on Simulation of Adaptive Behavior (SAB), 2010
•Zhong et al., ‘An Ant Colony Optimization Competition Routing Algorithm for WSN’, 4th International Conference on Wireless Communications, Networking and Mobile Computing, pp.1-4, 12-14 Oct. 2008. doi: 10.1109/WiCom.2008.932
(Kennislink)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
08-09-2011
9/11 luidde het tijdperk van de robots in
Een robot is aan het werk in de getroffen kerncentrale van Fukushima. © afp
De instortende torens van het World Trade Center in New York op 11 september 2001 waren misschien wel het symbool van een nieuw tijdperk voor robots. De voorbije tien jaar werden robots immers vaker ingezet bij allerlei rampen. 9/11 was hun eerste grote test.
© epa
© epa
De meeste robots zijn in handen van vrijwilligers, die hun best doen om de techniek te verspreiden. Daardoor duurt het soms dagen vooraleer robots in een rampgebied worden ingezet
Robots hebben geen angst en ze zijn efficiënt
Professor Robin Murphy
© ap
In 2010 waren we blij dat robots zo dicht bij het olielek in de Golf van Mexico konden komen. © ap
Robin Murphy dacht meteen aan robots toen hij de puinhoop in New York zag. In de jaren voor de aanslagen waren robots veel kleiner geworden, maar tot dan toe waren ze nog nooit getest tijdens rampen. Murphy, professor aan de Texas A&M Universiteit, besloot dat de tijd van de robots was aangebroken. Toestellen niet groter dan een schoendoos werden naar het rampgebied gezonden om zich een weg te banen door de brokstukken van het WTC.
"Het was te smal voor mensen of honden om door de brokstukken te bewegen. En waar we wel geraakten, waren er vaak branden die het gevaarlijk maakten", zegt Murphy. Robots waren er al lang, maar voor 9/11 hadden ze hun nut in rampscenario's nog niet bewezen. De tien volgende jaren werden ze vaker ingezet bij allerlei rampen, zoals orkanen, aardbevingen en zelfs olierampen. Intussen zijn ze daarop voorbereid, maar op 11 september 2001 werden ze letterlijk uit het laboratorium gesleurd.
Te land, ter zee en in de lucht
In het voorjaar van 2011 rolde een nieuwer model van de robot van 9/11 de kerncentrale van het Japanse Fukushima binnen. Het toestel ging er een controle uitvoeren na de kernramp die veroorzaakt werd door de aardbeving en tsunami van 11 maart. Voor mensen was die opdracht wegens hoge straling te gevaarlijk. De zogenaamde PackBot werd van op afstand met een joystick bestuurd. Dat besturingssysteem is letterlijk geïnspireerd op de controllers van Xbox en andere consoles.
Vliegende robots werden in 2005 ingezet toen New Orleans verwoest werd door orkaan Katrina. Ze konden slachtoffers zoeken die gestrand waren door overstromingen, terwijl reddingsteams met roeiboten op zoek moesten gaan. En in 2010 doken de robots ook onder water door de olieramp van BP in de Golf van Mexico. Goedkoop zijn de robots niet, maar ze zijn economisch wel interessant. Ze ontnemen de mens veel en soms onrealistisch werk. "Robots hebben geen angst en ze zijn efficiënt", zegt Murphy.
Moderne robots
Toch hebben robots nog veel werk aan hun imago. Dat komt volgens Murphy omdat ze nog geen 'Lassie-moment' hebben gekend. We kunnen ons immers geen precieze situatie herinneren waarin robots het leven van iemand in een noodsituatie gered hebben. Nochtans hebben robots bijvoorbeeld na 9/11 de structuur van de site getest, zodat reddingswerkers niet in gevaarlijke situatie terecht konden komen.
Een ander probleem is het gebrek aan subsidies. De meeste robots zijn in handen van vrijwilligers, die hun best doen om de techniek te verspreiden. Daardoor duurt het soms dagen vooraleer robots in een rampgebied worden ingezet. En tot slot zijn robots nog niet vaardig genoeg. Zelfs al zijn ze nog zo klein, sommige doorgangen zijn ook voor een robot onmogelijk.
Maar er breekt weldra een nieuw tijdperk voor de robots aan. iRobot probeert zijn robots meer autonomie te geven, waardoor de mensen achter de joysticks minder belangrijk worden. Andere producenten werken aan robots die als grote wormen door brokstukken kunnen kronkelen. Al heeft Murphy daar één bedenking bij: deze moderne robots kunnen slachtoffers angst aanjagen tijdens een reddingsoperatie. "Ik weet niet of ik als slachtoffer deze robots op mij zou willen zien afkomen." (gb)
(HLN)
9/11 luidde het tijdperk van de robots in

Een robot is aan het werk in de getroffen kerncentrale van Fukushima. © afp
De instortende torens van het World Trade Center in New York op 11 september 2001 waren misschien wel het symbool van een nieuw tijdperk voor robots. De voorbije tien jaar werden robots immers vaker ingezet bij allerlei rampen. 9/11 was hun eerste grote test.

© epa

© epa
De meeste robots zijn in handen van vrijwilligers, die hun best doen om de techniek te verspreiden. Daardoor duurt het soms dagen vooraleer robots in een rampgebied worden ingezet


Robots hebben geen angst en ze zijn efficiënt
Professor Robin Murphy

© ap

In 2010 waren we blij dat robots zo dicht bij het olielek in de Golf van Mexico konden komen. © ap
Robin Murphy dacht meteen aan robots toen hij de puinhoop in New York zag. In de jaren voor de aanslagen waren robots veel kleiner geworden, maar tot dan toe waren ze nog nooit getest tijdens rampen. Murphy, professor aan de Texas A&M Universiteit, besloot dat de tijd van de robots was aangebroken. Toestellen niet groter dan een schoendoos werden naar het rampgebied gezonden om zich een weg te banen door de brokstukken van het WTC.
"Het was te smal voor mensen of honden om door de brokstukken te bewegen. En waar we wel geraakten, waren er vaak branden die het gevaarlijk maakten", zegt Murphy. Robots waren er al lang, maar voor 9/11 hadden ze hun nut in rampscenario's nog niet bewezen. De tien volgende jaren werden ze vaker ingezet bij allerlei rampen, zoals orkanen, aardbevingen en zelfs olierampen. Intussen zijn ze daarop voorbereid, maar op 11 september 2001 werden ze letterlijk uit het laboratorium gesleurd.
Te land, ter zee en in de lucht
In het voorjaar van 2011 rolde een nieuwer model van de robot van 9/11 de kerncentrale van het Japanse Fukushima binnen. Het toestel ging er een controle uitvoeren na de kernramp die veroorzaakt werd door de aardbeving en tsunami van 11 maart. Voor mensen was die opdracht wegens hoge straling te gevaarlijk. De zogenaamde PackBot werd van op afstand met een joystick bestuurd. Dat besturingssysteem is letterlijk geïnspireerd op de controllers van Xbox en andere consoles.
Vliegende robots werden in 2005 ingezet toen New Orleans verwoest werd door orkaan Katrina. Ze konden slachtoffers zoeken die gestrand waren door overstromingen, terwijl reddingsteams met roeiboten op zoek moesten gaan. En in 2010 doken de robots ook onder water door de olieramp van BP in de Golf van Mexico. Goedkoop zijn de robots niet, maar ze zijn economisch wel interessant. Ze ontnemen de mens veel en soms onrealistisch werk. "Robots hebben geen angst en ze zijn efficiënt", zegt Murphy.
Moderne robots
Toch hebben robots nog veel werk aan hun imago. Dat komt volgens Murphy omdat ze nog geen 'Lassie-moment' hebben gekend. We kunnen ons immers geen precieze situatie herinneren waarin robots het leven van iemand in een noodsituatie gered hebben. Nochtans hebben robots bijvoorbeeld na 9/11 de structuur van de site getest, zodat reddingswerkers niet in gevaarlijke situatie terecht konden komen.
Een ander probleem is het gebrek aan subsidies. De meeste robots zijn in handen van vrijwilligers, die hun best doen om de techniek te verspreiden. Daardoor duurt het soms dagen vooraleer robots in een rampgebied worden ingezet. En tot slot zijn robots nog niet vaardig genoeg. Zelfs al zijn ze nog zo klein, sommige doorgangen zijn ook voor een robot onmogelijk.
Maar er breekt weldra een nieuw tijdperk voor de robots aan. iRobot probeert zijn robots meer autonomie te geven, waardoor de mensen achter de joysticks minder belangrijk worden. Andere producenten werken aan robots die als grote wormen door brokstukken kunnen kronkelen. Al heeft Murphy daar één bedenking bij: deze moderne robots kunnen slachtoffers angst aanjagen tijdens een reddingsoperatie. "Ik weet niet of ik als slachtoffer deze robots op mij zou willen zien afkomen." (gb)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
14-09-2011
Tractor wordt autonoom rondrijdende veldrobot
Onderzoekers van het Flander's Mechatronics Technology Centre (FMTC) en de afdeling Mechatronica, Biostatistiek en Sensoren van de KUL zijn erin geslaagd een tractor van New Holland om te bouwen tot een autonoom rondrijdende veldrobot.
De tractor is in staat zelf bodemkarakteristieken te analyseren en op basis daarvan de optimale snelheid en stuurhoek te kiezen, waardoor hij zelfstandig een gewenst traject zeer nauwkeurig kan afleggen.
Uitdaging
De belangrijkste uitdaging voor de onderzoekers was een precieze sturing te vinden die de rol van ervaren bestuurders van tractoren kan overnemen. De bestuurder observeert immers de tractorpositie, maakt een inschatting van de ondergrond en het te volgen traject, en bepaalt op basis hiervan snelheid en oriëntatie van de tractor.
De tractor werd daarom uitgerust met diverse technologische snufjes die hem in staat stellen de bodemkarakteristieken te analyseren, het slipgedrag van de wielen in te schatten en de optimale snelheid en stuurhoek te berekenen.
Voordeel
Het voordeel van een dergelijke autonome tractor is vooreerst een verbetering van de precisie in de sturing, waarvan het belang onder meer door de opkomst van de biologische landbouw sterk toegenomen is.
Daarnaast kan hierdoor bespaard worden op de personeelskost. "Door het zelfregelend gedrag van de robot wordt bovendien ook de afregeling van de sturing bij gewijzigde bodemcondities overbodig", aldus Wouter Saeys (K.U.Leuven). (belga/sam)
(HLN)
Tractor wordt autonoom rondrijdende veldrobot

Onderzoekers van het Flander's Mechatronics Technology Centre (FMTC) en de afdeling Mechatronica, Biostatistiek en Sensoren van de KUL zijn erin geslaagd een tractor van New Holland om te bouwen tot een autonoom rondrijdende veldrobot.
De tractor is in staat zelf bodemkarakteristieken te analyseren en op basis daarvan de optimale snelheid en stuurhoek te kiezen, waardoor hij zelfstandig een gewenst traject zeer nauwkeurig kan afleggen.
Uitdaging
De belangrijkste uitdaging voor de onderzoekers was een precieze sturing te vinden die de rol van ervaren bestuurders van tractoren kan overnemen. De bestuurder observeert immers de tractorpositie, maakt een inschatting van de ondergrond en het te volgen traject, en bepaalt op basis hiervan snelheid en oriëntatie van de tractor.
De tractor werd daarom uitgerust met diverse technologische snufjes die hem in staat stellen de bodemkarakteristieken te analyseren, het slipgedrag van de wielen in te schatten en de optimale snelheid en stuurhoek te berekenen.
Voordeel
Het voordeel van een dergelijke autonome tractor is vooreerst een verbetering van de precisie in de sturing, waarvan het belang onder meer door de opkomst van de biologische landbouw sterk toegenomen is.
Daarnaast kan hierdoor bespaard worden op de personeelskost. "Door het zelfregelend gedrag van de robot wordt bovendien ook de afregeling van de sturing bij gewijzigde bodemcondities overbodig", aldus Wouter Saeys (K.U.Leuven). (belga/sam)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
14-09-2011
NASA-technologie helpt water vinden
Een onderzoeksteam onder leiding van NASA heeft, met bodemradartechnologie die ontwikkeld is om onder het oppervlak van de planeet Mars te 'kijken', het diepe grondwater in de noordelijke woestijn van Koeweit in kaart gebracht.
Het team vloog in een met bodemradar uitgeruste helikopter op een hoogte van driehonderd meter boven een gebied dat bekendstaat om zijn watervoerende bodemlagen (aquifers). Daarbij is aangetoond dat deze technologie kan worden gebruikt om ondergrondse watervoorraden op te sporen tot op diepten van 65 meter. De verkregen gegevens kunnen worden gebruikt om gerichter naar water te boren.
De gebruikte bodemradar is vergelijkbaar met de radarsystemen aan boord van de Europese ruimtesonde Mars Express en de Mars Reconnaissance Orbiter van NASA. Met deze Marsradars is wel ondergronds ijs ontdekt, maar nog geen vloeibaar water. De onderzoekers hopen dat de ervaringen die in Koeweit zijn opgedaan ook de zoektocht naar water op Mars zullen vergemakkelijken.
© Eddy Echternach (www.astronieuws.nl)
(allesoversterrenkunde)
NASA-technologie helpt water vinden

Een onderzoeksteam onder leiding van NASA heeft, met bodemradartechnologie die ontwikkeld is om onder het oppervlak van de planeet Mars te 'kijken', het diepe grondwater in de noordelijke woestijn van Koeweit in kaart gebracht.
Het team vloog in een met bodemradar uitgeruste helikopter op een hoogte van driehonderd meter boven een gebied dat bekendstaat om zijn watervoerende bodemlagen (aquifers). Daarbij is aangetoond dat deze technologie kan worden gebruikt om ondergrondse watervoorraden op te sporen tot op diepten van 65 meter. De verkregen gegevens kunnen worden gebruikt om gerichter naar water te boren.
De gebruikte bodemradar is vergelijkbaar met de radarsystemen aan boord van de Europese ruimtesonde Mars Express en de Mars Reconnaissance Orbiter van NASA. Met deze Marsradars is wel ondergronds ijs ontdekt, maar nog geen vloeibaar water. De onderzoekers hopen dat de ervaringen die in Koeweit zijn opgedaan ook de zoektocht naar water op Mars zullen vergemakkelijken.
© Eddy Echternach (www.astronieuws.nl)
(allesoversterrenkunde)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
16-09-2011
Japanse minirobot neemt deel aan Ironman Hawaï
Hij is niet veel groter dan een hand, maar toch bereidt een robot van Panasonic zich voor op een reuzeopdracht. Evolta gaat binnenkort deelnemen aan de Ironman in Hawaï, één van de zwaarste triatlons ter wereld. "De Ironman is voor een getrainde sportman al een gigantische opgave, maar ik wil het erop wagen", zegt Tomotaka Takahashi, de bedenker van Evolta.
© afp
De deelname van de Japanse minirobot is eigenlijk niks meer dan een marketingstunt voor batterijen. Evolta zal voor de triatlon uitgerust worden met drie verschillende 'hulpstukken', die elk aangedreven worden door de batterijen die 1.800 keer heropgeladen kunnen worden.
Gezien de kleine gestalte van Evolta krijgt de robot een week de tijd om de triatlon af te leggen, tien keer meer dan een mens. "Evolta is tien keer zo klein als een volwassen man, dus ligt het volgens ons voor de hand dat hij er tien keer zo lang over zal doen", aldus Takahashi. De Ironman bestaat uit 3,8 km zwemmen, 180 km fietsen en 42 km lopen. (hlnsydney/sps)
© epa
© reuters
© afp
(HLN)
Japanse minirobot neemt deel aan Ironman Hawaï

Hij is niet veel groter dan een hand, maar toch bereidt een robot van Panasonic zich voor op een reuzeopdracht. Evolta gaat binnenkort deelnemen aan de Ironman in Hawaï, één van de zwaarste triatlons ter wereld. "De Ironman is voor een getrainde sportman al een gigantische opgave, maar ik wil het erop wagen", zegt Tomotaka Takahashi, de bedenker van Evolta.

© afp
De deelname van de Japanse minirobot is eigenlijk niks meer dan een marketingstunt voor batterijen. Evolta zal voor de triatlon uitgerust worden met drie verschillende 'hulpstukken', die elk aangedreven worden door de batterijen die 1.800 keer heropgeladen kunnen worden.
Gezien de kleine gestalte van Evolta krijgt de robot een week de tijd om de triatlon af te leggen, tien keer meer dan een mens. "Evolta is tien keer zo klein als een volwassen man, dus ligt het volgens ons voor de hand dat hij er tien keer zo lang over zal doen", aldus Takahashi. De Ironman bestaat uit 3,8 km zwemmen, 180 km fietsen en 42 km lopen. (hlnsydney/sps)

© epa

© reuters

© afp
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
30-09-2011
TU/e organiseert eigen robotvoetbaltoernooi
Het team robotvoetballers van de Technische Universiteit Eindhoven (TU/e) houdt vanaf 2012 jaarlijks een internationaal toernooi waaraan topteams uit de hele wereld gaan deelnemen.
Foto: AFP
Dat kondigde manager van team Tech United Guy Vermeulen vrijdag aan.De zogenoemde RoboCup Dutch Open vindt plaats van 25 tot en met 29 april in het Indoor Sportcentrum in Eindhoven.
Tech United werd afgelopen zomer voor de vierde keer op rij tweede op het wereldkampioenschap voor robotvoetballers. In de finale werd nipt verloren van een Chinees team.
.
© ANP
(nu.nl)
TU/e organiseert eigen robotvoetbaltoernooi
Het team robotvoetballers van de Technische Universiteit Eindhoven (TU/e) houdt vanaf 2012 jaarlijks een internationaal toernooi waaraan topteams uit de hele wereld gaan deelnemen.

Foto: AFP
Dat kondigde manager van team Tech United Guy Vermeulen vrijdag aan.De zogenoemde RoboCup Dutch Open vindt plaats van 25 tot en met 29 april in het Indoor Sportcentrum in Eindhoven.
Tech United werd afgelopen zomer voor de vierde keer op rij tweede op het wereldkampioenschap voor robotvoetballers. In de finale werd nipt verloren van een Chinees team.
.
© ANP
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Ruimtevaart is wel ergens goed voorquote:Op donderdag 15 september 2011 09:20 schreef ExperimentalFrentalMental het volgende:
14-09-2011
NASA-technologie helpt water vinden
Een onderzoeksteam onder leiding van NASA heeft, met bodemradartechnologie die ontwikkeld is om onder het oppervlak van de planeet Mars te 'kijken', het diepe grondwater in de noordelijke woestijn van Koeweit in kaart gebracht.
13-10-2011
'Denkende' robot in de maak
Robots die leren van ervaringen en nieuwe problemen kunnen oplossen, komen eraan.
Een Japanse wetenschapper heeft een systeem ontwikkeld waarmee een robot met al aanwezige informatie zelf concludeert wat nodig is om een opdracht uit te voeren.
De extra informatie haalt de robot van internet af, zei Osamu Hasegawa van het Tokio Institute of Technology donderdag. Een robot waaraan bijvoorbeeld wordt gevraagd sojasaus op de eettafel te zetten, zou op internet kunnen leren wat sojasaus is en die kunnen vinden in de keuken, aldus de wetenschapper.
Technologie ontwikkelt zich razendsnel en Hasegawa waarschuwt voor de morele grenzen. ''Wat voor opdrachten laten we computers uitvoeren? En is het mogelijk dat ze zich tegen ons zullen keren? Een keukenmes is een nuttig gebruiksvoorwerp. Maar het kan ook een wapen zijn.'' Hij hoopt dat allerlei mensen gaan discussiëren over hoe de robots zullen worden gebruikt.
© ANP
(nu.nl)
'Denkende' robot in de maak

Robots die leren van ervaringen en nieuwe problemen kunnen oplossen, komen eraan.
Een Japanse wetenschapper heeft een systeem ontwikkeld waarmee een robot met al aanwezige informatie zelf concludeert wat nodig is om een opdracht uit te voeren.
De extra informatie haalt de robot van internet af, zei Osamu Hasegawa van het Tokio Institute of Technology donderdag. Een robot waaraan bijvoorbeeld wordt gevraagd sojasaus op de eettafel te zetten, zou op internet kunnen leren wat sojasaus is en die kunnen vinden in de keuken, aldus de wetenschapper.
Technologie ontwikkelt zich razendsnel en Hasegawa waarschuwt voor de morele grenzen. ''Wat voor opdrachten laten we computers uitvoeren? En is het mogelijk dat ze zich tegen ons zullen keren? Een keukenmes is een nuttig gebruiksvoorwerp. Maar het kan ook een wapen zijn.'' Hij hoopt dat allerlei mensen gaan discussiëren over hoe de robots zullen worden gebruikt.
© ANP
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
21-10-2011
Robot van Lego lost Rubiks kubus op in 5,35 seconden
Wij hebben de moed zelfs niet om er nog maar aan te beginnen, maar deze robot lost een Rubiks kubus op in amper 5,35 seconden. De robot is het geesteskind van David Gilday en Mike Dobson en heet CubeStorm II.
De CubeStorm II is volledig uit Lego opgebouwd en wordt bestuurd door een Android smartphone. De robot heeft uiteraard wel enkele hulpmiddelen, zoals algoritmes en een Android app die loopt op Samsung Galaxy SII, ARM processors en Lego Mindstorm NXT kits. (hlnsydney/sps)
(HLN)
Robot van Lego lost Rubiks kubus op in 5,35 seconden

Wij hebben de moed zelfs niet om er nog maar aan te beginnen, maar deze robot lost een Rubiks kubus op in amper 5,35 seconden. De robot is het geesteskind van David Gilday en Mike Dobson en heet CubeStorm II.
De CubeStorm II is volledig uit Lego opgebouwd en wordt bestuurd door een Android smartphone. De robot heeft uiteraard wel enkele hulpmiddelen, zoals algoritmes en een Android app die loopt op Samsung Galaxy SII, ARM processors en Lego Mindstorm NXT kits. (hlnsydney/sps)
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
15-12-2011
Robots duiken kopererts en diamanten uit de oceaan op
Door: Marcel Hulspas
Nederlandse diepzee-onderzoekers helpen bedrijven zoeken naar bijzondere metalen op de zeebodem. Maar de zorg om het kwetsbare diepzee-ecosysteem staat voorop.
De wereld heeft een onstilbare honger naar speciale metalen. Maar deze zijn steeds moeilijker te vinden. De winbare reserves slinken met de jaren. Dat wil zeggen: de reserves op het land. Steeds meer bedrijven richten de blik op de diepzee. Op kilometers diepte moeten nog onbekende, maar ongetwijfeld ongekend grote hoeveelheden metaalerts te vinden zijn. Ze kloppen aan bij het Nederlands Instituut voor Onderzoek der Zee (NIOZ), gevestigd in Oudeschild, op Texel, dat al vele jaren ervaring heeft met de exploratie van de diepzee. Welke metalen zijn daar te vinden? Volgens het hoofd van de afdeling Diepzee Onderzoek en Technologie Marck Smit valt er in ieder geval heel wat omhoog te halen: ‘Bij Deep Sea Mining moet je vooral denken aan zwavelhoudende mineralen, die naast zwavel veel metalen bevatten als koper, zink en andere schaarse metalen. Die zwavelhoudende mineralen ontstaan op de breukvlakken van de aardkorst, waar de zee verhit wordt door onderzeese hete bronnen, op 1.500 tot 3.500 meter diepte. Daarnaast zijn op veel plekken op de zeebodem mangaanknollen te vinden, stenen van zo’n zeven centimeter doorsnee die naast mangaan veel nikkel, kobalt en koper bevatten. Die liggen op een diepte van vier- à vijfduizend meter. En dan zijn er nog metaalrijke mangaankorsten, fosforknollen, diamanten, et cetera.’
Het NIOZ is toch een wetenschappelijk instituut?
‘Exploratie van de zeeën en oceanen is de kern van ons werk! We beschikken over een groot onderzoeksschip dat bijna het hele jaar in gebruik is voor diepzeeonderzoek. Daarnaast doen we onderzoek naar de dynamiek van oceanen en welke rol ze spelen in de klimaatverandering. Dichter bij huis onderzoeken we bijvoorbeeld de ecologische effecten van windparken in zee, en verder worden boorkernen uit de diepzee gebruikt voor de reconstructie van het klimaat in het verleden. Tot 150 miljoen jaar geleden!’
En wat is er zoal gevonden?
‘Diamanten voor de kust van Zuid-Afrika. Deze worden gewonnen door onderwaterrobots die ontwikkeld zijn door een dochter van de Nederlandse firma IHC Merwede. Grote oppervlakten bedekt met mangaanknollen in de Grote Oceaan en rond Australië. Metaalhoudende mineralen in de Grote Oceaan, ten westen van Mexico. Een aantal gebieden daar zijn toebedeeld aan landen – voor nader onderzoek – door de International Seabed Authority.’
Wat is dat voor organisatie?
‘Dit is een door de Verenigde Naties opgerichte organisatie die toezicht houdt op Deep Sea Mining in de internationale zeeën en oceanen.’
Je had het over robots. Doen die het zware werk?
‘Momenteel zijn er onderwaterrobots die over de zeebodem rijden om diamanten te winnen. Ook voor andere Deep Sea Mining toepassingen wordt aan robots gedacht. Een grote robot bijvoorbeeld die over de zeebodem rijdt, en de bovenlaag er vanaf ‘knaagt’. Het erts moet dan met een grote onderwaterpomp naar een schip gepompt worden. Een groot deel van de techniek ligt al uitgewerkt op de tekentafel.’
De diepzee geldt als een kwetsbaar ecosysteem. Hoe voorkom je dat al die mijnbouw grote schade veroorzaakt?
‘Dat is de kern van de zaak! Hier bij het NIOZ vinden we het heel erg belangrijk te onderzoeken wat de ecologische effecten van dergelijke activiteiten zullen zijn. En dus na te gaan of Deep Sea Mining op een ecologisch verantwoorde wijze, duurzaam dus, uitgevoerd kan worden. Je kunt je wellicht voorstellen dat die mijnbouwactiviteiten onder water een ‘stofwolk’ zullen veroorzaken. Hoe lang blijft die stofwolk hangen? Wat is het effect op organismen in de zee door zo’n stofwolk? Dat willen we weten. En verder: als zo’n onderwaterleefgemeenschap volledig omgeploegd wordt, hoe lang duurt het dan voor het meeste leven weer terug is? Op welke wijze kunnen we dat proces beïnvloeden? Dat zijn allemaal vragen waar wij als onderzoeksinstituut een antwoord op willen geven.’
(depers.nl)
Robots duiken kopererts en diamanten uit de oceaan op
Door: Marcel Hulspas

Nederlandse diepzee-onderzoekers helpen bedrijven zoeken naar bijzondere metalen op de zeebodem. Maar de zorg om het kwetsbare diepzee-ecosysteem staat voorop.
De wereld heeft een onstilbare honger naar speciale metalen. Maar deze zijn steeds moeilijker te vinden. De winbare reserves slinken met de jaren. Dat wil zeggen: de reserves op het land. Steeds meer bedrijven richten de blik op de diepzee. Op kilometers diepte moeten nog onbekende, maar ongetwijfeld ongekend grote hoeveelheden metaalerts te vinden zijn. Ze kloppen aan bij het Nederlands Instituut voor Onderzoek der Zee (NIOZ), gevestigd in Oudeschild, op Texel, dat al vele jaren ervaring heeft met de exploratie van de diepzee. Welke metalen zijn daar te vinden? Volgens het hoofd van de afdeling Diepzee Onderzoek en Technologie Marck Smit valt er in ieder geval heel wat omhoog te halen: ‘Bij Deep Sea Mining moet je vooral denken aan zwavelhoudende mineralen, die naast zwavel veel metalen bevatten als koper, zink en andere schaarse metalen. Die zwavelhoudende mineralen ontstaan op de breukvlakken van de aardkorst, waar de zee verhit wordt door onderzeese hete bronnen, op 1.500 tot 3.500 meter diepte. Daarnaast zijn op veel plekken op de zeebodem mangaanknollen te vinden, stenen van zo’n zeven centimeter doorsnee die naast mangaan veel nikkel, kobalt en koper bevatten. Die liggen op een diepte van vier- à vijfduizend meter. En dan zijn er nog metaalrijke mangaankorsten, fosforknollen, diamanten, et cetera.’
Het NIOZ is toch een wetenschappelijk instituut?
‘Exploratie van de zeeën en oceanen is de kern van ons werk! We beschikken over een groot onderzoeksschip dat bijna het hele jaar in gebruik is voor diepzeeonderzoek. Daarnaast doen we onderzoek naar de dynamiek van oceanen en welke rol ze spelen in de klimaatverandering. Dichter bij huis onderzoeken we bijvoorbeeld de ecologische effecten van windparken in zee, en verder worden boorkernen uit de diepzee gebruikt voor de reconstructie van het klimaat in het verleden. Tot 150 miljoen jaar geleden!’
En wat is er zoal gevonden?
‘Diamanten voor de kust van Zuid-Afrika. Deze worden gewonnen door onderwaterrobots die ontwikkeld zijn door een dochter van de Nederlandse firma IHC Merwede. Grote oppervlakten bedekt met mangaanknollen in de Grote Oceaan en rond Australië. Metaalhoudende mineralen in de Grote Oceaan, ten westen van Mexico. Een aantal gebieden daar zijn toebedeeld aan landen – voor nader onderzoek – door de International Seabed Authority.’
Wat is dat voor organisatie?
‘Dit is een door de Verenigde Naties opgerichte organisatie die toezicht houdt op Deep Sea Mining in de internationale zeeën en oceanen.’
Je had het over robots. Doen die het zware werk?
‘Momenteel zijn er onderwaterrobots die over de zeebodem rijden om diamanten te winnen. Ook voor andere Deep Sea Mining toepassingen wordt aan robots gedacht. Een grote robot bijvoorbeeld die over de zeebodem rijdt, en de bovenlaag er vanaf ‘knaagt’. Het erts moet dan met een grote onderwaterpomp naar een schip gepompt worden. Een groot deel van de techniek ligt al uitgewerkt op de tekentafel.’
De diepzee geldt als een kwetsbaar ecosysteem. Hoe voorkom je dat al die mijnbouw grote schade veroorzaakt?
‘Dat is de kern van de zaak! Hier bij het NIOZ vinden we het heel erg belangrijk te onderzoeken wat de ecologische effecten van dergelijke activiteiten zullen zijn. En dus na te gaan of Deep Sea Mining op een ecologisch verantwoorde wijze, duurzaam dus, uitgevoerd kan worden. Je kunt je wellicht voorstellen dat die mijnbouwactiviteiten onder water een ‘stofwolk’ zullen veroorzaken. Hoe lang blijft die stofwolk hangen? Wat is het effect op organismen in de zee door zo’n stofwolk? Dat willen we weten. En verder: als zo’n onderwaterleefgemeenschap volledig omgeploegd wordt, hoe lang duurt het dan voor het meeste leven weer terug is? Op welke wijze kunnen we dat proces beïnvloeden? Dat zijn allemaal vragen waar wij als onderzoeksinstituut een antwoord op willen geven.’
(depers.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Vreemd dat deze hier nog niet langs gekomen is:
Petman, de 2-benige robot van Boston Dynamics (ook van BigDog)
tevens TVP
Petman, de 2-benige robot van Boston Dynamics (ook van BigDog)

tevens TVP
01-02-2012
Robotkrab verwijdert beginnende maagkanker
Wetenschappers in Singapore hebben een krabachtig robotje ontwikkeld dat maagkanker in een vroeg stadium kan verwijderen.
De ontwikkelaars kwamen op het idee voor het apparaat na een diner, waar ze geïnspireerd raakten door het uiterlijk van een krab.
Artsen in India en het Chinese Hongkong hebben tot op heden vijf patiënten geholpen met een prototype van de 'robotkrab'. Ze deden dat in een fractie van de tijd die gemoeid is met een operatie. Een normale operatie laat bovendien littekens achter en geeft kans op infecties.
.Het krabachtige robotje gaat op een endoscoop, een buis waarmee de arts in het lichaam kan kijken, via de mond van de patiënt de maag in.
Het radiografische bestuurbare apparaat heeft een tangetje waarmee het weefsel kan vasthouden. Met een haakje verwijdert het robotje het slechte weefsel.
© ANP
(nu.nl)
Robotkrab verwijdert beginnende maagkanker
Wetenschappers in Singapore hebben een krabachtig robotje ontwikkeld dat maagkanker in een vroeg stadium kan verwijderen.

De ontwikkelaars kwamen op het idee voor het apparaat na een diner, waar ze geïnspireerd raakten door het uiterlijk van een krab.
Artsen in India en het Chinese Hongkong hebben tot op heden vijf patiënten geholpen met een prototype van de 'robotkrab'. Ze deden dat in een fractie van de tijd die gemoeid is met een operatie. Een normale operatie laat bovendien littekens achter en geeft kans op infecties.
.Het krabachtige robotje gaat op een endoscoop, een buis waarmee de arts in het lichaam kan kijken, via de mond van de patiënt de maag in.
Het radiografische bestuurbare apparaat heeft een tangetje waarmee het weefsel kan vasthouden. Met een haakje verwijdert het robotje het slechte weefsel.
© ANP
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
22-02-2012
Volg de robot
Vissen accepteren robotvis als deze op een natuurlijke manier zwemt
Hoe krijg je een school visjes zo ver dat ze niet hun eigen leider maar een robotvis volgen? Het geheim zit ‘m in de staart.
© Maurizio Porfiri
De visjes uit dit onderzoek volgden de robotvis bij voorkeur als deze op een natuurlijke manier zwom. Oftewel, als de robot hetzelfde staartritme had als zijzelf. Zoals op deze foto.
Dieren hebben niet zo’n moeite met robots. Eenden laten zich bijvoorbeeld net zo makkelijk hoeden door een robothond als een echte hond. En kakkerlakken laten zich met een gerust hart leiden door robotjes die voor geen centimeter op hen lijken, als de geur maar klopt. Ook vissen blijken makkelijk te foppen, zo valt deze week te lezen in het blad Royal Society Interface.
Twee wetenschappers uit de Verenigde Staten voerden proeven uit met een robotvis, echte visjes en een glazen bak waar met een door de onderzoekers in te stellen snelheid water doorheen stroomde. De visjes waren van de in Noord-Amerika vrij algemeen voorkomende soort golden shiner (Notemigonus crysoleucas), die geen Nederlandse naam heeft. Stefano Marras en Maurizio Porfiri keken hoe de beestjes zich gedroegen in aanwezigheid van de robot, onder allerlei omstandigheden. Zo lieten ze de robotvis met verschillende snelheden met z’n staart slaan (de zwembeweging van een vis) en varieerden ze de stroomsnelheid van het water.
In sommige gevallen trokken de kleine goudkleurige visjes zich niets aan van de robotvis. Vooral niet als deze niet “zwom”, oftewel als hij z’n staart stil hield. Maar als de robot wel met z’n staart sloeg, waren de vissen geneigd achter hem te gaan zwemmen. Zoals ze zouden doen wanneer ze een leider volgen in een school. En: hoe dichter de snelheid waarmee de robot met z’n staart sloeg die van de visjes zelf benaderde (wat afhing van hoe sterk de visjes hun best moesten doen om tegen de stroom in te zwemmen), hoe sterker ze geneigd waren de robot op te zoeken. Reden voor Marras en Porfiri om te concluderen dat de vissen bij voorkeur de robot volgen als deze er een natuurlijke zwemstijl op nahoudt.
Wat trouwens niet betekent dat de vissen de robot dan als één van hen zien. De kans is groot dat ze achter de robot gaan zwemmen, omdat ze in zijn kielzog minder waterweerstand ondervinden. Waardoor het zwemmen voor hen makkelijker gaat. En die verminderde weerstand is optimaal als jouw voorganger met hetzelfde staartritme zwemt als jij.
De Amerikaanse wetenschappers hopen dat dankzij hun onderzoek bijvoorbeeld in ’t wild levende, bedreigde scholen vissen naar veiligere oorden kunnen worden gelokt. Hier op de redactie kunnen we ons echter ook iets minder nobele toepassingen voor de robotlokvis voorstellen.
(wetenschap24.nl)
Volg de robot
Vissen accepteren robotvis als deze op een natuurlijke manier zwemt
Hoe krijg je een school visjes zo ver dat ze niet hun eigen leider maar een robotvis volgen? Het geheim zit ‘m in de staart.

© Maurizio Porfiri
De visjes uit dit onderzoek volgden de robotvis bij voorkeur als deze op een natuurlijke manier zwom. Oftewel, als de robot hetzelfde staartritme had als zijzelf. Zoals op deze foto.
Dieren hebben niet zo’n moeite met robots. Eenden laten zich bijvoorbeeld net zo makkelijk hoeden door een robothond als een echte hond. En kakkerlakken laten zich met een gerust hart leiden door robotjes die voor geen centimeter op hen lijken, als de geur maar klopt. Ook vissen blijken makkelijk te foppen, zo valt deze week te lezen in het blad Royal Society Interface.
Twee wetenschappers uit de Verenigde Staten voerden proeven uit met een robotvis, echte visjes en een glazen bak waar met een door de onderzoekers in te stellen snelheid water doorheen stroomde. De visjes waren van de in Noord-Amerika vrij algemeen voorkomende soort golden shiner (Notemigonus crysoleucas), die geen Nederlandse naam heeft. Stefano Marras en Maurizio Porfiri keken hoe de beestjes zich gedroegen in aanwezigheid van de robot, onder allerlei omstandigheden. Zo lieten ze de robotvis met verschillende snelheden met z’n staart slaan (de zwembeweging van een vis) en varieerden ze de stroomsnelheid van het water.
In sommige gevallen trokken de kleine goudkleurige visjes zich niets aan van de robotvis. Vooral niet als deze niet “zwom”, oftewel als hij z’n staart stil hield. Maar als de robot wel met z’n staart sloeg, waren de vissen geneigd achter hem te gaan zwemmen. Zoals ze zouden doen wanneer ze een leider volgen in een school. En: hoe dichter de snelheid waarmee de robot met z’n staart sloeg die van de visjes zelf benaderde (wat afhing van hoe sterk de visjes hun best moesten doen om tegen de stroom in te zwemmen), hoe sterker ze geneigd waren de robot op te zoeken. Reden voor Marras en Porfiri om te concluderen dat de vissen bij voorkeur de robot volgen als deze er een natuurlijke zwemstijl op nahoudt.
Wat trouwens niet betekent dat de vissen de robot dan als één van hen zien. De kans is groot dat ze achter de robot gaan zwemmen, omdat ze in zijn kielzog minder waterweerstand ondervinden. Waardoor het zwemmen voor hen makkelijker gaat. En die verminderde weerstand is optimaal als jouw voorganger met hetzelfde staartritme zwemt als jij.
De Amerikaanse wetenschappers hopen dat dankzij hun onderzoek bijvoorbeeld in ’t wild levende, bedreigde scholen vissen naar veiligere oorden kunnen worden gelokt. Hier op de redactie kunnen we ons echter ook iets minder nobele toepassingen voor de robotlokvis voorstellen.
(wetenschap24.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...


Sebastian Thrun, de man die oa. heeft gewerkt aan Google's autonome (zelf-rijdende) auto en expert op AI gebied, heeft vorig jaar een gratis online versie van Stanford's Introduction to Artificial Intelligence course gegeven. Vanwege het enorme aantal aanmeldingen (150.000), heeft hij nu een 7-weken-durende online cursus opgezet genaamd Programming a Robotic Car. Wederom helemaal gratis. Je maakt natuurlijk geen volledige autonome auto, maar leert oa. probabilistic inference, computer vision, machine learning, en planning, allemaal toegespitst op robotische auto's. Er wordt verwacht dat je voldoende kennis hebt met programmeren (cursus is in Python, maar dit is niet moeilijk te leren als je al andere talen kent), en basiskennis van lineare algebra en kansberekening. De cursus bestaat uit hoorcollege's, huiswerk, kleine tussentijdse toetsen en een afsluitend tentamen.
Het is wat basic als je al een AI achtergrond hebt, maar heel leuk voor bv. informatici (of anderen met ervaring in programmeren) die hier geïnteresseerd in zijn. Hieronder een overzicht van de lessen:
Hoe je je aanmeldt, meer informatie, en een handige FAQ, kan je hier vinden:quote:WEEK 1:
Basics of probability
Car localization with particle filters
WEEK 2:
Gaussians and continuous probability
Tracking other cars with Kalman filters
WEEK 3:
Image Processing and Machine Learning
Finding objects in sensor data
WEEK 4:
Planning and search
Determining where to drive with A* search
Finding optimal routes with dynamic programming
WEEK 5:
Controls
Controlling steering and speeds with PID
WEEK 6:
Putting it all together
Programming a self-driving car
WEEK 7:
Final Exam
Exam testing your knowledge
http://www.udacity.com/overview/Course/cs373
Let wel op, als je je wilt inschrijven: De volgende huiswerkopdracht moet volgende week woensdag af zijn!
quote:
Vreemd dat deze hier nog niet langs gekomen is:
Petman, de 2-benige robot van Boston Dynamics (ook van BigDog)
tevens TVP
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Hier de kwalificatievideo van TU Eindhoven voor Adult-size Humanoid klasse voor Robocup 2012:
Het is het niet echt indrukwekkend, maar wel leuk dat ze ook voor deze klasse naar Mexico gaan.
Er start binnenkort ook een online course Machine Learning door prof. Andrew Ng. Ik had me al ingeschreven, maar denk niet dat ik er tijd voor heb:
http://www.ml-class.org/course/auth/welcome

Het is het niet echt indrukwekkend, maar wel leuk dat ze ook voor deze klasse naar Mexico gaan.
Er start binnenkort ook een online course Machine Learning door prof. Andrew Ng. Ik had me al ingeschreven, maar denk niet dat ik er tijd voor heb:
http://www.ml-class.org/course/auth/welcome
Als ik me registreer staat er anders 16 oct tot december.. Maar dan hebben ze weer lectures 1+2 online... confusingquote:
Hier de kwalificatievideo van TU Eindhoven voor Adult-size Humanoid klasse voor Robocup 2012:
Het is het niet echt indrukwekkend, maar wel leuk dat ze ook voor deze klasse naar Mexico gaan.
Er start binnenkort ook een online course Machine Learning door prof. Andrew Ng. Ik had me al ingeschreven, maar denk niet dat ik er tijd voor heb:
http://www.ml-class.org/course/auth/welcome
Wauw, indrukwekkendquote:
Vreemd dat deze hier nog niet langs gekomen is:
Petman, de 2-benige robot van Boston Dynamics (ook van BigDog)
tevens TVP
Perhaps you've seen it, maybe in a dream.
A murky, forgotten land.
A murky, forgotten land.
@StateOfMind
Het is inderdaad erg indrukwekkend. Vergeleken met bijvoorbeeld Asimo wordt er wel een beetje vals gespeeld. Petman wordt namelijk hydraulisch aangedreven met een extern agregaat waardoor hij niet autonoom is.
@koffiegast:
Sorry, verkeerde link: http://jan2012.ml-class.org/
Het zou eigenlijk in januari starten, maar er was wat vertraging ingeslopen.
Het is inderdaad erg indrukwekkend. Vergeleken met bijvoorbeeld Asimo wordt er wel een beetje vals gespeeld. Petman wordt namelijk hydraulisch aangedreven met een extern agregaat waardoor hij niet autonoom is.
@koffiegast:
Sorry, verkeerde link: http://jan2012.ml-class.org/
Het zou eigenlijk in januari starten, maar er was wat vertraging ingeslopen.
05-03-2012
Nieuwe robot is autonoom manusje van alles
Een nieuwe robot van DARPA is een handig manusje van alles dat ook nog eens autonoom opereert.
De robot kan echt van alles. Papiertjes aan elkaar nieten bijvoorbeeld. Een deur van slot doen. En zelfs voor een klusje in huis draait de robot zijn hand niet om: zo kan hij bijvoorbeeld prima boren.
Zo’n veelzijdige robot is op zichzelf natuurlijk al heel indrukwekkend. Maar het wordt nog indrukwekkender als u bedenkt dat deze robot autonoom functioneert. De robot krijgt opdracht om iets te doen, maar daarna wordt deze niet meer actief begeleid. Met behulp van sensoren moet de robot zelf uitzoeken hoe hij objecten het beste kan oppakken en gebruiken.
DARPA (Defense Advanced Research Projects Agency) – ontwikkelaar van militaire technologie – heeft er al heel wat experimenten met de robot op zitten. En deze zijn naar behoren verlopen. Tijd voor de volgende stap: de robot nog complexere taken zelfstandig laten uitvoeren.
(scientias)
Nieuwe robot is autonoom manusje van alles

Een nieuwe robot van DARPA is een handig manusje van alles dat ook nog eens autonoom opereert.
De robot kan echt van alles. Papiertjes aan elkaar nieten bijvoorbeeld. Een deur van slot doen. En zelfs voor een klusje in huis draait de robot zijn hand niet om: zo kan hij bijvoorbeeld prima boren.
Zo’n veelzijdige robot is op zichzelf natuurlijk al heel indrukwekkend. Maar het wordt nog indrukwekkender als u bedenkt dat deze robot autonoom functioneert. De robot krijgt opdracht om iets te doen, maar daarna wordt deze niet meer actief begeleid. Met behulp van sensoren moet de robot zelf uitzoeken hoe hij objecten het beste kan oppakken en gebruiken.

DARPA (Defense Advanced Research Projects Agency) – ontwikkelaar van militaire technologie – heeft er al heel wat experimenten met de robot op zitten. En deze zijn naar behoren verlopen. Tijd voor de volgende stap: de robot nog complexere taken zelfstandig laten uitvoeren.
(scientias)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Had wel verwacht dat deze hier ook wel zou staan al  Hoewel dat ding nog lang niet zo hard kan rennen als een echte cheetah kan hij wel harder dan een mens. Combineer hem met Big Dog en je krijgt toch wel angstaanjagende robots
Hoewel dat ding nog lang niet zo hard kan rennen als een echte cheetah kan hij wel harder dan een mens. Combineer hem met Big Dog en je krijgt toch wel angstaanjagende robots

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

QFT! Beide robots zijn trouwens wel gemaakt door hetzelfde bedrijf Boston Dynamics.quote:Op dinsdag 6 maart 2012 09:43 schreef Eyjafjallajoekull het volgende:
Had wel verwacht dat deze hier ook wel zou staan al
Ja die lui van Boston Dynamics zijn lekker bezig de laatste tijd. Ik kan niet wachten tot de volgende versie van PETMAN.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
quote:
Had wel verwacht dat deze hier ook wel zou staan al
06-03-2012
Robot zet snelheidsrecord neer

Een robot in de vorm van een jachtluipaard heeft een nieuw snelheidsrecord voor robots op pootjes neergezet.
Het jachtluipaard rende 18 mijl per uur, oftewel 28,97 kilometer per uur. Een aanzienlijke verbetering ten opzichte van het vorige record dat in 1989 werd neergezet: 21 kilometer per uur.
DARPA
De robot is het werk van Boston Dynamics in opdracht van DARPA (een organisatie die technologieën voor militaire doeleinden ontwikkelt). De robot heeft de vorm van een jachtluipaard en loopt ook ongeveer op dezelfde manier. En hoewel hij voor een robot heel hard loopt, kan hij een echt jachtluipaard nog lang niet bijhouden. Echte jachtluipaarden kunnen snelheden van meer dan 100 kilometer per uur halen.
In het midden
De robot van DARPA liep het snelheidsrecord op een loopband. Nu wordt het jachtluipaard nog door mensen op dezelfde plaats gehouden. Later dit jaar hopen de onderzoekers de recordpoging te herhalen en dan moet het jachtluipaard er zelf voor zorgen dat deze midden op de loopband blijft lopen.
Wetenschappers hebben op dit moment geen heel concrete plannen met de robot. Het zijn echt nog experimenten die in een veel later stadium moeten leiden tot een heel snelle en stabiele robot. Zo’n robot zou handig zijn voor op het slagveld. Al is het alleen maar om de tegenstander angst aan te jagen: want een beetje eng is het toch wel wanneer tientallen van deze robots met grote snelheid aan komen stampen.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
20-03-2012
Tweebenige TUlip leert lopen als een mens
Willen we in de toekomst levensechte robotbutlers, dan moeten robots eerst leren lopen als een mens. Ondanks een paar succesverhalen is de looptechniek nog niet perfect. Daarom keek TU Delft promovendus Tomas de Boer nog eens goed naar de looptechniek van de mens. Het resultaat is de looprobot TUlip, één van de meest veelzijdige en robuuste looprobots ooit gebouwd.
Looprobot TUlip. Afbeelding: © Delft Biorobotics Lab
De Technische Universiteit Delft heeft een goede reputatie als het gaat om het bouwen van looprobots. Van low-tech Denise tot de geavanceerde Flame, het ene model lijkt nog menselijker dan het andere. Hiermee concurreren ze met autogiganten zoals Honda, die hun robot ASIMO laat afreizen naar techniekbeurzen, scholen en Disneyland.
Toch schieten al deze robots nog te kort. De ideale looprobot is veelzijdig, robuust en energie-efficiënt (zie afbeelding). En hoewel Flame zeer energiezuinig is, kan de robot niet veel meer dan vooruit lopen. ASIMO kan daarentegen alle kanten op, maar zijn geavanceerde bouw vreet stroom, waardoor een belangrijk deel van de robot uit accu’s bestaat (zijn befaamde rugzakje).
Daarom is TU promovendus Tomas de Boer teruggegaan naar de mens om te ontdekken wat ons nou zo goed maakt in lopen op twee benen, en hoe hij dat aan een robot kan leren. De nieuwe Delftse looprobot TUlip is daarvan het resultaat.
Een vergelijking van verschillende looprobots ten opzichte van de ideale tweebener, de mens. Goede looprobots blijven in balans als ze een duw krijgen (robuust), kunnen gemakkelijk van snelheid, richting en looptechniek wisselen (veelzijdig) en zijn energiezuinig. Afbeelding: © Tomas de Boer, TU Delft
Lopen, draaien, voetballen
TUlip is ontworpen met het idee van het zwaartepunt (het middelpunt van de massa in het lichaam, bij een staand mens ongeveer bij de navel) centraal. Kan je de snelheid en positie van je zwaartepunt controleren, dan blijf je in balans. Het goed plaatsen van je voeten ten opzichte van je zwaartepunt is hierbij heel belangrijk. Daarom bedacht De Boer een algoritme dat berekent waar de voet terecht moet komen om controle te houden over het zwaartepunt. Hieronder een voorbeeld van het algoritme wanneer TUlip een duwtje krijgt.
Een overzicht van wat er gebeurt als TUlip een duwtje krijgt terwijl de robot op één been staat. Het algoritme gebruikt de positie van het zwaartepunt om uit te rekenen waar de voet moet terechtkomen zodat de robot blijft staan. Afbeelding: © Delft Biorobotics Lab
Met dit algoritme kan TUlip lopen, van richting veranderen en het evenwicht bewaren bij een duw of als één voet op een bewegend platform staat. De robot kan zelfs een goeie trap tegen een voetbal geven. Waarom dat? Om te kwalificeren voor het jaarlijkse Robocup toernooi natuurlijk!
Robocup
Jaarlijks strijden robotbouwers uit de hele wereld tegen elkaar om de beste voetbalrobot te bouwen. Het doel: om in 2050 een compleet robotelftal te hebben dat de vloer aanveegt met een team van mensen. TUlip deed in 2011 mee in de ‘humanoid’ (mensvormige) categorie, waar de robots doeltrappen nemen. Helaas sneuvelde de Delftse creatie in de kwartfinale.
Dit jaar doet de robot niet mee omdat de groep zich wil richten op het verder uitwerken van De Boer’s algoritme. Volgens Martijn Wisse, De Boer’s copromotor, is dat hard nodig om succes te boeken op het toernooi. “Als andere robots niet optimaal werken doen ze in elk geval nog iets. Als onze robot niet werkt, dan gebeurt er ook echt helemaal niks.” Maar als de mannen en vrouwen van het Delft Biorobotics Lab alle rimpels hebben gladgestreken, laten ze in een toekomstig toernooi iedereen ongetwijfeld versteld staan van TUlip’s traptechniek.
(Kennislink)
Tweebenige TUlip leert lopen als een mens
Willen we in de toekomst levensechte robotbutlers, dan moeten robots eerst leren lopen als een mens. Ondanks een paar succesverhalen is de looptechniek nog niet perfect. Daarom keek TU Delft promovendus Tomas de Boer nog eens goed naar de looptechniek van de mens. Het resultaat is de looprobot TUlip, één van de meest veelzijdige en robuuste looprobots ooit gebouwd.

Looprobot TUlip. Afbeelding: © Delft Biorobotics Lab
De Technische Universiteit Delft heeft een goede reputatie als het gaat om het bouwen van looprobots. Van low-tech Denise tot de geavanceerde Flame, het ene model lijkt nog menselijker dan het andere. Hiermee concurreren ze met autogiganten zoals Honda, die hun robot ASIMO laat afreizen naar techniekbeurzen, scholen en Disneyland.
Toch schieten al deze robots nog te kort. De ideale looprobot is veelzijdig, robuust en energie-efficiënt (zie afbeelding). En hoewel Flame zeer energiezuinig is, kan de robot niet veel meer dan vooruit lopen. ASIMO kan daarentegen alle kanten op, maar zijn geavanceerde bouw vreet stroom, waardoor een belangrijk deel van de robot uit accu’s bestaat (zijn befaamde rugzakje).
Daarom is TU promovendus Tomas de Boer teruggegaan naar de mens om te ontdekken wat ons nou zo goed maakt in lopen op twee benen, en hoe hij dat aan een robot kan leren. De nieuwe Delftse looprobot TUlip is daarvan het resultaat.

Een vergelijking van verschillende looprobots ten opzichte van de ideale tweebener, de mens. Goede looprobots blijven in balans als ze een duw krijgen (robuust), kunnen gemakkelijk van snelheid, richting en looptechniek wisselen (veelzijdig) en zijn energiezuinig. Afbeelding: © Tomas de Boer, TU Delft
Lopen, draaien, voetballen
TUlip is ontworpen met het idee van het zwaartepunt (het middelpunt van de massa in het lichaam, bij een staand mens ongeveer bij de navel) centraal. Kan je de snelheid en positie van je zwaartepunt controleren, dan blijf je in balans. Het goed plaatsen van je voeten ten opzichte van je zwaartepunt is hierbij heel belangrijk. Daarom bedacht De Boer een algoritme dat berekent waar de voet terecht moet komen om controle te houden over het zwaartepunt. Hieronder een voorbeeld van het algoritme wanneer TUlip een duwtje krijgt.

Een overzicht van wat er gebeurt als TUlip een duwtje krijgt terwijl de robot op één been staat. Het algoritme gebruikt de positie van het zwaartepunt om uit te rekenen waar de voet moet terechtkomen zodat de robot blijft staan. Afbeelding: © Delft Biorobotics Lab
Met dit algoritme kan TUlip lopen, van richting veranderen en het evenwicht bewaren bij een duw of als één voet op een bewegend platform staat. De robot kan zelfs een goeie trap tegen een voetbal geven. Waarom dat? Om te kwalificeren voor het jaarlijkse Robocup toernooi natuurlijk!
Robocup
Jaarlijks strijden robotbouwers uit de hele wereld tegen elkaar om de beste voetbalrobot te bouwen. Het doel: om in 2050 een compleet robotelftal te hebben dat de vloer aanveegt met een team van mensen. TUlip deed in 2011 mee in de ‘humanoid’ (mensvormige) categorie, waar de robots doeltrappen nemen. Helaas sneuvelde de Delftse creatie in de kwartfinale.
Dit jaar doet de robot niet mee omdat de groep zich wil richten op het verder uitwerken van De Boer’s algoritme. Volgens Martijn Wisse, De Boer’s copromotor, is dat hard nodig om succes te boeken op het toernooi. “Als andere robots niet optimaal werken doen ze in elk geval nog iets. Als onze robot niet werkt, dan gebeurt er ook echt helemaal niks.” Maar als de mannen en vrouwen van het Delft Biorobotics Lab alle rimpels hebben gladgestreken, laten ze in een toekomstig toernooi iedereen ongetwijfeld versteld staan van TUlip’s traptechniek.
(Kennislink)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
22-03-2012
Deze robot kan eeuwig zwemmen
Wetenschappers hebben een kwal-robot ontwikkeld die in theorie nooit zonder energie zal komen te zitten.
De robot – die vanzelfsprekend onder water leeft – haalt zijn energie namelijk uit water. En aangezien de robot daardoor omringd wordt, hoeft deze niet bang te zijn voor energietekorten.
Robojelly
De robot – die de naam Robojelly draagt – beweegt zich ongeveer net zo als een echte kwal voort. Net als een echte kwal kan de robot zijn vorm en grootte aanpassen om zich te verplaatsen. De robot beschikt daartoe over ‘spieren’ die zich samen kunenn trekken en kunnen ontspannen. Wanneer de spieren zich ontspannen dan neemt de kwal automatisch weer de vorm aan die deze voor de krachtinspanning had. Dat kan de robot doen dankzij geheugenmetalen: materialen die zich hun oorspronkelijke vorm kunnen ‘herinneren’.
Energie
Om de robot zo te laten bewegen, is natuurlijk energie nodig. Die haalt de robot uit chemische reacties die op zijn eigen oppervlak plaatsvinden. Bij die reacties zijn zuurstof en waterstof in het water en het platina op de robot betrokken. De reacties zorgen voor hitte die weer naar de kunstmatige spieren van de robot wordt gestuurd en ervoor zorgt dat deze verschillende vormen kunnen aannemen. Eigenlijk haalt de robot dus energie uit zijn omgeving. Er is geen externe energiebron nodig en dus kan de kwal eigenlijk zolang deze zich in het water bevindt energie opwekken.
De onderzoekers beschrijven Robojelly in het blad Smart Materials and Structures. Hoewel het ontwerp al best indrukwekkend is, is er nog wel wat ruimte voor verbetering. Zo beweegt de robot nu als geheel en de onderzoekers zouden graag willen dat de verschillende delen van de robot ook onafhankelijk van elkaar kunnen bewegen. In de toekomst kan de robot dan wellicht gebruikt worden om mensen of voorwerpen onder water op te sporen.
(scientias.nl)
Deze robot kan eeuwig zwemmen

Wetenschappers hebben een kwal-robot ontwikkeld die in theorie nooit zonder energie zal komen te zitten.
De robot – die vanzelfsprekend onder water leeft – haalt zijn energie namelijk uit water. En aangezien de robot daardoor omringd wordt, hoeft deze niet bang te zijn voor energietekorten.
Robojelly
De robot – die de naam Robojelly draagt – beweegt zich ongeveer net zo als een echte kwal voort. Net als een echte kwal kan de robot zijn vorm en grootte aanpassen om zich te verplaatsen. De robot beschikt daartoe over ‘spieren’ die zich samen kunenn trekken en kunnen ontspannen. Wanneer de spieren zich ontspannen dan neemt de kwal automatisch weer de vorm aan die deze voor de krachtinspanning had. Dat kan de robot doen dankzij geheugenmetalen: materialen die zich hun oorspronkelijke vorm kunnen ‘herinneren’.

Energie
Om de robot zo te laten bewegen, is natuurlijk energie nodig. Die haalt de robot uit chemische reacties die op zijn eigen oppervlak plaatsvinden. Bij die reacties zijn zuurstof en waterstof in het water en het platina op de robot betrokken. De reacties zorgen voor hitte die weer naar de kunstmatige spieren van de robot wordt gestuurd en ervoor zorgt dat deze verschillende vormen kunnen aannemen. Eigenlijk haalt de robot dus energie uit zijn omgeving. Er is geen externe energiebron nodig en dus kan de kwal eigenlijk zolang deze zich in het water bevindt energie opwekken.
De onderzoekers beschrijven Robojelly in het blad Smart Materials and Structures. Hoewel het ontwerp al best indrukwekkend is, is er nog wel wat ruimte voor verbetering. Zo beweegt de robot nu als geheel en de onderzoekers zouden graag willen dat de verschillende delen van de robot ook onafhankelijk van elkaar kunnen bewegen. In de toekomst kan de robot dan wellicht gebruikt worden om mensen of voorwerpen onder water op te sporen.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
30-03-2012
Nieuwe robot springt negen meter hoog
Van gebouw naar gebouw springen: deze robotisch zandvlo draait er zijn hand niet voor om. Indrukwekkend!
De robot is ontwikkeld door Boston Dynamics en kan gemakkelijk negen meter hoog springen. Dat betekent dat de robot eigenlijk elk obstakel wel kan trotseren. Een stoepje op? Geen probleem. Een gebouw in de weg? Voor u het weet zit de robot – die de naam SandFlea draagt – op het dak.
Vier wieltjes
De robot weegt amper vijf kilo en is uitgerust met vier wielen. Wanneer er gesprongen moet worden, richt de robot zich een beetje op. Eenmaal in de lucht zorgt een gyrostabilisator ervoor dat de robot zich horizontaal verplaatst en weer op zijn wieltjes terechtkomt.
Energie
Al die sprongen vergen natuurlijk wel wat van SandFlea. In totaal kan de robot er ongeveer 25 op één acculading uitvoeren. Niet slecht.
De ontwikkeling van SandFlea werd mede mogelijk gemaakt door het Amerikaanse leger. Zij zien wel wat in SandFlea. De robot kan bijvoorbeeld op daken springen om de boel te verkennen. Of door een raam op de tweede verdieping springen om te achterhalen of zich hier verdachten ophouden.
(scientias.nl)
Nieuwe robot springt negen meter hoog

Van gebouw naar gebouw springen: deze robotisch zandvlo draait er zijn hand niet voor om. Indrukwekkend!
De robot is ontwikkeld door Boston Dynamics en kan gemakkelijk negen meter hoog springen. Dat betekent dat de robot eigenlijk elk obstakel wel kan trotseren. Een stoepje op? Geen probleem. Een gebouw in de weg? Voor u het weet zit de robot – die de naam SandFlea draagt – op het dak.
Vier wieltjes
De robot weegt amper vijf kilo en is uitgerust met vier wielen. Wanneer er gesprongen moet worden, richt de robot zich een beetje op. Eenmaal in de lucht zorgt een gyrostabilisator ervoor dat de robot zich horizontaal verplaatst en weer op zijn wieltjes terechtkomt.

Energie
Al die sprongen vergen natuurlijk wel wat van SandFlea. In totaal kan de robot er ongeveer 25 op één acculading uitvoeren. Niet slecht.
De ontwikkeling van SandFlea werd mede mogelijk gemaakt door het Amerikaanse leger. Zij zien wel wat in SandFlea. De robot kan bijvoorbeeld op daken springen om de boel te verkennen. Of door een raam op de tweede verdieping springen om te achterhalen of zich hier verdachten ophouden.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
30-03-2012
Nieuw: een ‘levende’ robot voor in uw lijf
De robot gedraagt zich min of meer als een levend wezen en moet ooit het menselijk lichaam in om ziektes op te sporen.
Voor de ontwikkeling van de robot lieten de onderzoekers zich inspireren door het diertje dat u hierboven ziet. Een zeeprik. Deze wormachtige parasieten leven in de Atlantische Oceaan. Ze hebben een heel primitief zenuwstelsel dat een stuk gemakkelijker te imiteren is dan dat van andere organismen.
Zenuwstelsel
Het is de bedoeling dat de robot – die de naam Cyberplasm draagt – een elektronisch zenuwstelsel krijgt. Dat zou betekenen dat de robot in staat is om te ‘zien’ en te ‘ruiken’. De sensoren die de robot daarvoor nodig heeft, willen de wetenschappers uit cellen van zoogdieren halen. Ook moeten er kunstmatige spieren worden ontwikkeld die glucose als energiebron gebruiken.
Zien en ruiken
En dan komt Cyberplasm toch al aardig in de buurt van een levend wezen. En dat is precies de bedoeling. “Niets kan tippen aan de natuurlijke vaardigheid van een levend wezen om te zien en te ruiken en zo informatie te verzamelen over wat er gaande is,” stelt onderzoeker Daniel Frankel in een persbericht.
De wetenschappers werken nu aan een prototype Cyberplasm. De robot wordt in eerste instantie minder dan één centimeter lang. Toekomstige exemplaren kunnen nog veel kleiner worden: minder dan één millimeter lang. De robots kunnen in de toekomst in het menselijk lichaam worden gebracht om te kijken of er sprake is van ziektes of andere problemen. Naar verwachting kan de robot binnen vijf jaar gebruikt worden.
(scientias.nl)
Nieuw: een ‘levende’ robot voor in uw lijf

De robot gedraagt zich min of meer als een levend wezen en moet ooit het menselijk lichaam in om ziektes op te sporen.
Voor de ontwikkeling van de robot lieten de onderzoekers zich inspireren door het diertje dat u hierboven ziet. Een zeeprik. Deze wormachtige parasieten leven in de Atlantische Oceaan. Ze hebben een heel primitief zenuwstelsel dat een stuk gemakkelijker te imiteren is dan dat van andere organismen.
Zenuwstelsel
Het is de bedoeling dat de robot – die de naam Cyberplasm draagt – een elektronisch zenuwstelsel krijgt. Dat zou betekenen dat de robot in staat is om te ‘zien’ en te ‘ruiken’. De sensoren die de robot daarvoor nodig heeft, willen de wetenschappers uit cellen van zoogdieren halen. Ook moeten er kunstmatige spieren worden ontwikkeld die glucose als energiebron gebruiken.
Zien en ruiken
En dan komt Cyberplasm toch al aardig in de buurt van een levend wezen. En dat is precies de bedoeling. “Niets kan tippen aan de natuurlijke vaardigheid van een levend wezen om te zien en te ruiken en zo informatie te verzamelen over wat er gaande is,” stelt onderzoeker Daniel Frankel in een persbericht.
De wetenschappers werken nu aan een prototype Cyberplasm. De robot wordt in eerste instantie minder dan één centimeter lang. Toekomstige exemplaren kunnen nog veel kleiner worden: minder dan één millimeter lang. De robots kunnen in de toekomst in het menselijk lichaam worden gebracht om te kijken of er sprake is van ziektes of andere problemen. Naar verwachting kan de robot binnen vijf jaar gebruikt worden.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
13-04-2012
Levensechte robotvrouw zingt liedje in Chinees shoppingcenter
© epa.
Geminoid F, met deze naam stelde de Japanse ontwerper Hiroshi Ishiguro zijn levensechte robotvrouw voor in een shoppingcenter in Hong Kong. Haar naam mag misschien niet echt menselijk in de oren klinken, verder is de gelijkenis met ons ras treffend. Zo kan Geminoid F naast praten, zingen en lachen, ook 65 menselijke gelaatstrekken nabootsen, waardoor ze zich dus ook non-verbaal kan uitdrukken.
© epa.
Hoewel ze er soms een beetje verdoofd en verbaasd uitziet, kan Geminoid F, via een mechanisme dat onder haar rubberen 'huid' verstopt zit, toch op een redelijk menselijke manier lachen, praten en zingen. Dankzij haar mysterieuze gelaatsuitdrukkingen en gefronste wenkbrauwen komt ze zelfs aardig in de buurt van een geslaagde menselijke imitatie.
© epa.
De Japanse robotontwerper, Hiroshi Ishiguro, heeft in het verleden al verschillende menselijke robots ontworpen, waarvan eentje zelfs naar zijn eigen evenbeeld. Normaal kosten zijn exemplaren rond de 900.000 euro, maar Geminoid is een pak goedkoper ('slechts' 84.000 euro), omdat Ishiguro hoopt dat de technologie zo makkelijker geïntegreerd zal worden bij het grote publiek.
De professor hoopt bovendien dat robots op een dag zo sterk op mensen gelijken dat ze ons voor de gek kunnen houden. "Maar wat is menselijk?", lacht hij. "Geef me er een definitie van en wij zullen er wel een kopie van maken."
(HLN)
Levensechte robotvrouw zingt liedje in Chinees shoppingcenter

© epa.
Geminoid F, met deze naam stelde de Japanse ontwerper Hiroshi Ishiguro zijn levensechte robotvrouw voor in een shoppingcenter in Hong Kong. Haar naam mag misschien niet echt menselijk in de oren klinken, verder is de gelijkenis met ons ras treffend. Zo kan Geminoid F naast praten, zingen en lachen, ook 65 menselijke gelaatstrekken nabootsen, waardoor ze zich dus ook non-verbaal kan uitdrukken.

© epa.
Hoewel ze er soms een beetje verdoofd en verbaasd uitziet, kan Geminoid F, via een mechanisme dat onder haar rubberen 'huid' verstopt zit, toch op een redelijk menselijke manier lachen, praten en zingen. Dankzij haar mysterieuze gelaatsuitdrukkingen en gefronste wenkbrauwen komt ze zelfs aardig in de buurt van een geslaagde menselijke imitatie.

© epa.
De Japanse robotontwerper, Hiroshi Ishiguro, heeft in het verleden al verschillende menselijke robots ontworpen, waarvan eentje zelfs naar zijn eigen evenbeeld. Normaal kosten zijn exemplaren rond de 900.000 euro, maar Geminoid is een pak goedkoper ('slechts' 84.000 euro), omdat Ishiguro hoopt dat de technologie zo makkelijker geïntegreerd zal worden bij het grote publiek.
De professor hoopt bovendien dat robots op een dag zo sterk op mensen gelijken dat ze ons voor de gek kunnen houden. "Maar wat is menselijk?", lacht hij. "Geef me er een definitie van en wij zullen er wel een kopie van maken."

(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

Met name de armbewegingen zijn behoorlijk indrukwekkend! Lijkt erg vloeiend en snel te gaan.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Hij legt uit dat het bij een mens via motion capture is opgenomen, en vervolgens afgespeeld op de robot. Dat maakt het nogal wat makkelijker. Zijn onderzoek/thesis ging over push recovery, dus ik denk dat dit vooral voor de leuk is.
Als je verder luistert, zegt ie dat het afspelen op de robot niet 1 2 3 gaat, want de robot moet ook zichzelf stabiliseren tijdens het 'dansje'.quote:
Hij legt uit dat het bij een mens via motion capture is opgenomen, en vervolgens afgespeeld op de robot. Dat maakt het nogal wat makkelijker. Zijn onderzoek/thesis ging over push recovery, dus ik denk dat dit vooral voor de leuk is.
Stabiliseren moet sowieso gebeuren, ook als hij zijn armen stil houdt. Daarnaast vermoed ik dat het bewegen van de armen geen grote verstoring veroorzaken, in elk geval niets vergeleken met een harde duw.
24-04-2012
‘Robots domineren de Wallen in 2050′
In 2050 worden de Wallen gedomineerd door seksrobots en dat heeft alleen maar voordelen. Dat voorspellen wetenschappers.
Onderzoekers Ian Yeoman en Michelle Mars maken in hun paper ‘Robots, men and sex tourism‘ een kort uitstapje naar de toekomst. Ze beschrijven hoe de Wallen in Amsterdam er in 2050 uit kunnen gaan zien. En als ze het bij het rechte eind hebben, dan verandert er nogal wat.
Mensenhandel
“In 2050 zal de rosse buurt in Amsterdam draaien om robot-prostituees,” zo schrijven de twee. En die voorspelling is niet zomaar uit de lucht gegrepen. De onderzoekers leggen ook uit welke ontwikkelingen ervoor gezorgd hebben dat mensen vervangen zijn door robots. Zo is de mensenhandel enorm uit de hand gelopen en neemt het aantal onbehandelbare SOA’s toe. Het afschaffen van de Wallen is geen optie: het is onlosmakelijk met Amsterdam verbonden.
Voordelen
En dus is er maar één optie: robots als prostituees inzetten. “Zij hebben geen seksueel overdraagbare ziektes, hoeven niet uit Oost-Europa gesmokkeld en in de slavernij gedwongen te worden, de gemeenteraad heeft directe controle over de robots en bepaalt hun prijzen, werktijden en seksuele diensten,” zo schrijven Yeoman en Mars.
Concurrentie
En daarmee kunnen de robots heel wat problemen die de Wallen nu omringen, oplossen. Voorwaarde is wel dat de menselijke prostituees ruimte maken voor de robots. Dat zal zeker niet zonder slag of stoot gaan, maar uiteindelijk zullen de mensen niet kunnen concurreren met de robots die aan alle wensen kunnen voldoen en een stuk goedkoper zijn. De onderzoekers denken zelfs dat mensen een beter gevoel overhouden aan seks met een robot-prostituee. “Cliënten hebben geen schuldgevoel, omdat ze geen seks hebben met een echt persoon en daarom ook niet tegen hun partner hoeven te liegen.”
Maar zijn robots hier al wel klaar voor? Het kan niet lang meer duren, zo stellen de onderzoekers. “De grenzen tussen sciencefiction en feiten worden steeds waziger in de wereld waar technologie, consumptie en menselijkheid steeds belangrijker wordt.”
(scientias.nl)
‘Robots domineren de Wallen in 2050′

In 2050 worden de Wallen gedomineerd door seksrobots en dat heeft alleen maar voordelen. Dat voorspellen wetenschappers.
Onderzoekers Ian Yeoman en Michelle Mars maken in hun paper ‘Robots, men and sex tourism‘ een kort uitstapje naar de toekomst. Ze beschrijven hoe de Wallen in Amsterdam er in 2050 uit kunnen gaan zien. En als ze het bij het rechte eind hebben, dan verandert er nogal wat.
Mensenhandel
“In 2050 zal de rosse buurt in Amsterdam draaien om robot-prostituees,” zo schrijven de twee. En die voorspelling is niet zomaar uit de lucht gegrepen. De onderzoekers leggen ook uit welke ontwikkelingen ervoor gezorgd hebben dat mensen vervangen zijn door robots. Zo is de mensenhandel enorm uit de hand gelopen en neemt het aantal onbehandelbare SOA’s toe. Het afschaffen van de Wallen is geen optie: het is onlosmakelijk met Amsterdam verbonden.
Voordelen
En dus is er maar één optie: robots als prostituees inzetten. “Zij hebben geen seksueel overdraagbare ziektes, hoeven niet uit Oost-Europa gesmokkeld en in de slavernij gedwongen te worden, de gemeenteraad heeft directe controle over de robots en bepaalt hun prijzen, werktijden en seksuele diensten,” zo schrijven Yeoman en Mars.
Concurrentie
En daarmee kunnen de robots heel wat problemen die de Wallen nu omringen, oplossen. Voorwaarde is wel dat de menselijke prostituees ruimte maken voor de robots. Dat zal zeker niet zonder slag of stoot gaan, maar uiteindelijk zullen de mensen niet kunnen concurreren met de robots die aan alle wensen kunnen voldoen en een stuk goedkoper zijn. De onderzoekers denken zelfs dat mensen een beter gevoel overhouden aan seks met een robot-prostituee. “Cliënten hebben geen schuldgevoel, omdat ze geen seks hebben met een echt persoon en daarom ook niet tegen hun partner hoeven te liegen.”
Maar zijn robots hier al wel klaar voor? Het kan niet lang meer duren, zo stellen de onderzoekers. “De grenzen tussen sciencefiction en feiten worden steeds waziger in de wereld waar technologie, consumptie en menselijkheid steeds belangrijker wordt.”
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
24-04-2012
Zwitserse robot met hersens bestuurd
Zwitserse wetenschappers hebben een robot ontwikkeld die kan worden aangestuurd door middel van hersengolven.
Foto: Novum De wetenschappers gaven dinsdag een demonstratie.
Een deels verlamde patiënt in een ziekenhuis in het Zwitserse stadje Sion demonstreerde de techniek. Hij stelde zich voor dat hij zijn vingers bewoog om de robot, die zich op een andere locatie honderd kilometer van het ziekenhuis bevond, te besturen.
In onder meer de Verenigde Staten en Duitsland zijn vergelijkbare experimenten gedaan. Daarbij waren de testpersonen echter niet verlamd of moesten implantaten worden geplaatst in de hersenen. Bij het Zwitserse experiment was slechts een simpele muts nodig om de hersengolven van de testpersoon te meten.
© Novum
(nu.nl)
Zwitserse robot met hersens bestuurd
Zwitserse wetenschappers hebben een robot ontwikkeld die kan worden aangestuurd door middel van hersengolven.

Foto: Novum De wetenschappers gaven dinsdag een demonstratie.
Een deels verlamde patiënt in een ziekenhuis in het Zwitserse stadje Sion demonstreerde de techniek. Hij stelde zich voor dat hij zijn vingers bewoog om de robot, die zich op een andere locatie honderd kilometer van het ziekenhuis bevond, te besturen.
In onder meer de Verenigde Staten en Duitsland zijn vergelijkbare experimenten gedaan. Daarbij waren de testpersonen echter niet verlamd of moesten implantaten worden geplaatst in de hersenen. Bij het Zwitserse experiment was slechts een simpele muts nodig om de hersengolven van de testpersoon te meten.
© Novum
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
17-05-2012
Leiden robots tot desocialisering?
Beter samen met een robot, dan eenzaam en alleen op de bank? Robots zijn booming business, maar zijn ze ook goed voor onze samenleving?
De robotica is flink in opmars, maar leidt tot een aantal pittige vragen op politiek, juridisch en ethisch gebied. Nu al worden robots in gebruik genomen bij het leger en de politie. Maar er zijn ook robots in de maak voor de zorg en voor in huis. Tijdens de boekpresentatie van Overal robots. Automatisering van de liefde tot de dood vond afgelopen dinsdag een interessante discussie plaats. Want leiden robots niet tot desocialisering bij mensen?
Zorgrobot
Een robot die voor u een cola haalt en het vervolgens naar u toe brengt. Het kan! Studenten van de TU Delft ontwikkelden Eva, een robot die in de toekomst ingezet kan worden in de zorg. Ook wordt er in bepaalde revalidatiecentra al gebruik gemaakt van robots die patiënten helpen bij het leren lopen en het gebruiken van de armen. Een goede ontwikkeling zou u zeggen, ook vanwege de bezuinigingen en tekorten in de huidige zorg. Maar er is ook reden tot nadenken over het gebruik van robots. Voor nu kunnen zij alleen nog kleine taken verrichten, zoals Eva dat doet, maar ooit zal dit veranderen. De techniek zal zich zo ontwikkelen dat het ook mogelijk wordt om robots te bouwen die een mens kunnen vervangen. Maar willen we dat wel? Volgens Floortje Daemen, één van de hoofdauteurs van het boek, staat de zorg voor empathie en warmte. “Het dilemma speelt nog niet, maar in de toekomst moeten wij hier over gaan nadenken. Kunnen robots die belangrijke eigenschappen van de zorg ook aan mensen geven?” Hans Rietman, hoogleraar Revalidatiegeneeskunde en –technologie, vindt het ook belangrijk dat de patiënt vertrouwen heeft in de robot. “Als een robot hem of haar optilt, is het belangrijk dat de techniek goed werkt,” zegt hij tijdens de bijeenkomst. “Maar belangrijker, leidt een robot niet tot vervreemding tussen mensen? Een robot die bijna alle taken van een verzorger overneemt, wordt dan de sociale omgeving van de patiënt.”
Een Nao robot laat tijdens de presentatie zien hoe hij naar een blokje kan toelopen en het vervolgens kan optillen.
Aandacht
Meer zorgrobots betekent meer tijd voor verzorgers om aandacht aan de patiënt te besteden luidde de stelling. Rinie van Est, auteur van het boek, denkt dat het lastig wordt om dit waar te maken. “Ik denk niet dat verzorgers in staat zullen zijn om meer aandacht te geven aan de individuele patiënt. De robots zullen namelijk ook gemonitord moeten worden. Wel denk ik dat de kwaliteit van de zorg verbeterd kan worden door het gebruik van robots.” Professor Piet Jonker van de TU Delft hoopt dat robots het personeelsprobleem in de zorg kunnen oplossen, maar benadrukt dat patiënten toch aandacht willen van mensen. “Die persoonlijke aandacht moet niet verdwijnen. We moeten oppassen dat we geen hele kille samenleving creëren.” Waar robots patiënten wel bij kunnen helpen, is de zeggenschap over hun eigen leven. Jonker: “Neem als voorbeeld het aantrekken van de steunkousen: patiënten willen deze zelf aantrekken wanneer zij vinden dat dit nodig is. Zij willen niet wachten totdat een verzorger eindelijk tijd heeft om dit te doen. Als er een robot wordt ontwikkeld die dit soort klusjes kan doen, behouden patiënten hun vrijheid. Daarnaast krijgen patiënten bijna iedere week een andere verzorger, dit wordt ook niet altijd als positief ervaren. Zij kunnen dan zelf een overweging maken: Wil ik een machine die mij helpt of wil ik iedere week een andere verzorger?” Maar er moet ook gekeken naar wat verzorgers willen, beaamt Jonker. “Mensen die werkzaam zijn in de zorg halen voldoening uit hun werk door de dankbaarheid van een patiënt. Die dankbaarheid is hun motivatie om iedere dag naar het werk te gaan en anderen te helpen. Als je robots inzet, kan deze motivatie verdwijnen. Daar staat tegenover dat patiënten meer vrijheid krijgen.”
Sociale intelligentie
En dan zijn er ook sociale robots, voor in huis maar ook voor in de zorg. Deze robots moeten in de toekomst emoties herkennen en tonen en een dialoog kunnen voeren. Kortom: een robot die sociaal gedrag vertoont en die u gezelschap houdt. In de psychiatrische zorg wordt Pabo al ingezet. Dit is een robot in de vorm van een zeehond die demente bejaarden helpt. Het apparaat vraagt de aandacht van de patiënt en wordt vervolgens blij als hij deze ook werkelijk krijgt. De robot is een succes: zo blijkt dat de hersenen van de bejaarden weer worden geactiveerd. Ook leidt Pabo hen af bij angstige momenten. Een sociale robot zou niet alleen zieke mensen kunnen helpen, maar ook eenzame mensen. Een robot voor in huis, om samen mee op de bank te hangen. Sommigen vinden het geen goed idee. “Een robot heeft geen sociale intelligentie en ik denk niet dat hij dit ooit zal krijgen,” hoor ik iemand zeggen in het publiek. “Een robot stamt niet af van apen, mensen wel.” Anderen vinden een gezelschapsrobot niet anders dan een huisdier: “een kat of een hond stamt toch ook niet af van apen”. Toch gaat u met een hond wel naar buiten en met een robot niet, deze kan voor nog meer vervreemding van mensen zorgen.
Maar is de illusie van sociale intelligentie niet al genoeg? Mensen praten ook met hun kat of hond en hebben de illusie dat het dier hun begrijpt. Mensen accepteren dit, maar doen zij dat ook van robots? We moeten ons afvragen in wat voor samenleving we willen leven, één met menselijk contact of één met robots? Of een gulden middenweg? Zullen we menselijke vaardigheden verliezen door teveel met robots op te trekken? Een eenzaam persoon die zijn toevlucht zoekt bij een robot kan mogelijk de motivatie verliezen om echte vrienden te zoeken. Zo moeten we niet alles willen kopen in de wereld, zo ook geen sociaal contact. Robots kunnen wel degelijk een handje helpen, bijvoorbeeld in de zorg. Maar mensen helemaal vervangen, dat gaat wel heel erg ver. Er moeten dan ook goede afspraken worden gemaakt als het zover is. Wat denkt u? In welke mate mogen robots ingezet worden in de samenleving?
Aanstaande zondag 20 mei 2012 verschijnt op Scientias.nl om 08.00 uur de recensie van het boek Overal robots. Automatisering van de liefde tot de dood.
(scientias.nl)
Leiden robots tot desocialisering?

Beter samen met een robot, dan eenzaam en alleen op de bank? Robots zijn booming business, maar zijn ze ook goed voor onze samenleving?
De robotica is flink in opmars, maar leidt tot een aantal pittige vragen op politiek, juridisch en ethisch gebied. Nu al worden robots in gebruik genomen bij het leger en de politie. Maar er zijn ook robots in de maak voor de zorg en voor in huis. Tijdens de boekpresentatie van Overal robots. Automatisering van de liefde tot de dood vond afgelopen dinsdag een interessante discussie plaats. Want leiden robots niet tot desocialisering bij mensen?
Zorgrobot
Een robot die voor u een cola haalt en het vervolgens naar u toe brengt. Het kan! Studenten van de TU Delft ontwikkelden Eva, een robot die in de toekomst ingezet kan worden in de zorg. Ook wordt er in bepaalde revalidatiecentra al gebruik gemaakt van robots die patiënten helpen bij het leren lopen en het gebruiken van de armen. Een goede ontwikkeling zou u zeggen, ook vanwege de bezuinigingen en tekorten in de huidige zorg. Maar er is ook reden tot nadenken over het gebruik van robots. Voor nu kunnen zij alleen nog kleine taken verrichten, zoals Eva dat doet, maar ooit zal dit veranderen. De techniek zal zich zo ontwikkelen dat het ook mogelijk wordt om robots te bouwen die een mens kunnen vervangen. Maar willen we dat wel? Volgens Floortje Daemen, één van de hoofdauteurs van het boek, staat de zorg voor empathie en warmte. “Het dilemma speelt nog niet, maar in de toekomst moeten wij hier over gaan nadenken. Kunnen robots die belangrijke eigenschappen van de zorg ook aan mensen geven?” Hans Rietman, hoogleraar Revalidatiegeneeskunde en –technologie, vindt het ook belangrijk dat de patiënt vertrouwen heeft in de robot. “Als een robot hem of haar optilt, is het belangrijk dat de techniek goed werkt,” zegt hij tijdens de bijeenkomst. “Maar belangrijker, leidt een robot niet tot vervreemding tussen mensen? Een robot die bijna alle taken van een verzorger overneemt, wordt dan de sociale omgeving van de patiënt.”

Een Nao robot laat tijdens de presentatie zien hoe hij naar een blokje kan toelopen en het vervolgens kan optillen.
Aandacht
Meer zorgrobots betekent meer tijd voor verzorgers om aandacht aan de patiënt te besteden luidde de stelling. Rinie van Est, auteur van het boek, denkt dat het lastig wordt om dit waar te maken. “Ik denk niet dat verzorgers in staat zullen zijn om meer aandacht te geven aan de individuele patiënt. De robots zullen namelijk ook gemonitord moeten worden. Wel denk ik dat de kwaliteit van de zorg verbeterd kan worden door het gebruik van robots.” Professor Piet Jonker van de TU Delft hoopt dat robots het personeelsprobleem in de zorg kunnen oplossen, maar benadrukt dat patiënten toch aandacht willen van mensen. “Die persoonlijke aandacht moet niet verdwijnen. We moeten oppassen dat we geen hele kille samenleving creëren.” Waar robots patiënten wel bij kunnen helpen, is de zeggenschap over hun eigen leven. Jonker: “Neem als voorbeeld het aantrekken van de steunkousen: patiënten willen deze zelf aantrekken wanneer zij vinden dat dit nodig is. Zij willen niet wachten totdat een verzorger eindelijk tijd heeft om dit te doen. Als er een robot wordt ontwikkeld die dit soort klusjes kan doen, behouden patiënten hun vrijheid. Daarnaast krijgen patiënten bijna iedere week een andere verzorger, dit wordt ook niet altijd als positief ervaren. Zij kunnen dan zelf een overweging maken: Wil ik een machine die mij helpt of wil ik iedere week een andere verzorger?” Maar er moet ook gekeken naar wat verzorgers willen, beaamt Jonker. “Mensen die werkzaam zijn in de zorg halen voldoening uit hun werk door de dankbaarheid van een patiënt. Die dankbaarheid is hun motivatie om iedere dag naar het werk te gaan en anderen te helpen. Als je robots inzet, kan deze motivatie verdwijnen. Daar staat tegenover dat patiënten meer vrijheid krijgen.”
Sociale intelligentie
En dan zijn er ook sociale robots, voor in huis maar ook voor in de zorg. Deze robots moeten in de toekomst emoties herkennen en tonen en een dialoog kunnen voeren. Kortom: een robot die sociaal gedrag vertoont en die u gezelschap houdt. In de psychiatrische zorg wordt Pabo al ingezet. Dit is een robot in de vorm van een zeehond die demente bejaarden helpt. Het apparaat vraagt de aandacht van de patiënt en wordt vervolgens blij als hij deze ook werkelijk krijgt. De robot is een succes: zo blijkt dat de hersenen van de bejaarden weer worden geactiveerd. Ook leidt Pabo hen af bij angstige momenten. Een sociale robot zou niet alleen zieke mensen kunnen helpen, maar ook eenzame mensen. Een robot voor in huis, om samen mee op de bank te hangen. Sommigen vinden het geen goed idee. “Een robot heeft geen sociale intelligentie en ik denk niet dat hij dit ooit zal krijgen,” hoor ik iemand zeggen in het publiek. “Een robot stamt niet af van apen, mensen wel.” Anderen vinden een gezelschapsrobot niet anders dan een huisdier: “een kat of een hond stamt toch ook niet af van apen”. Toch gaat u met een hond wel naar buiten en met een robot niet, deze kan voor nog meer vervreemding van mensen zorgen.

Maar is de illusie van sociale intelligentie niet al genoeg? Mensen praten ook met hun kat of hond en hebben de illusie dat het dier hun begrijpt. Mensen accepteren dit, maar doen zij dat ook van robots? We moeten ons afvragen in wat voor samenleving we willen leven, één met menselijk contact of één met robots? Of een gulden middenweg? Zullen we menselijke vaardigheden verliezen door teveel met robots op te trekken? Een eenzaam persoon die zijn toevlucht zoekt bij een robot kan mogelijk de motivatie verliezen om echte vrienden te zoeken. Zo moeten we niet alles willen kopen in de wereld, zo ook geen sociaal contact. Robots kunnen wel degelijk een handje helpen, bijvoorbeeld in de zorg. Maar mensen helemaal vervangen, dat gaat wel heel erg ver. Er moeten dan ook goede afspraken worden gemaakt als het zover is. Wat denkt u? In welke mate mogen robots ingezet worden in de samenleving?
Aanstaande zondag 20 mei 2012 verschijnt op Scientias.nl om 08.00 uur de recensie van het boek Overal robots. Automatisering van de liefde tot de dood.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Leuk artikel. Eenvandaag heeft er ook een reportage over gemaakt:
http://www.eenvandaag.nl/binnenland/40370/de_robotrevolutie
http://www.eenvandaag.nl/binnenland/40370/de_robotrevolutie
20-05-2012
Overal robots: automatisering van de liefde tot de dood
Robots beginnen hun plekje in onze maatschappij op te eisen. Het boek ‘Overal robots’ laat zien wat de consequenties daarvan zijn.
Op dit moment worden robots al volop ingezet, maar hun inzet blijft beperkt. Zo vinden we ze alleen maar binnen de muren van fabrieken. Velen beginnen er nu van overtuigd te raken dat het tijd wordt dat de robot ook buiten die muren een rol gaat vervullen en bijvoorbeeld klusjes in het huishouden gaat doen, een deel van de (ouderen)zorg op zich neemt en ons bijstaat aan het oorlogsfront. Grote vraag is natuurlijk of de robots daar klaar voor zijn. En misschien nog wel belangrijker: zijn wij daar klaar voor?
Automatiseren
Met de inzet van robots in bijvoorbeeld de zorg of het huishouden worden taken die altijd met liefde door mensen zijn uitgevoerd, geautomatiseerd. Willen we dat wel? En kunnen robots dat werk net zo goed doen als wij mensen? Dat zijn vragen waar het boek ‘Overal robots‘ antwoord op probeert te geven. Om dat antwoord te vinden, wordt er gekeken naar ethische overwegingen, de mogelijkheden en onmogelijkheden van de robot en opkomende technologieën. De auteurs beperken zich daarbij tot een aantal domeinen waarbinnen de robot kan worden ingezet: in huis, in de zorg, in de fabriek, bij de politie en in het leger.
Alle kanten
Wanneer wij denken aan een robot die ons wat klussen uit handen neemt, dan zien we dat vaak wel zitten. Het boek ‘Overal robots‘ bekijkt die kwestie echter een stuk nuchterder en laat ons alle kanten van het verhaal zien. Een robot die kookt, is misschien wel handig, maar hoe veilig voelt u zich als u weet dat deze een keukenmes kan hanteren? En een seksrobot lijkt misschien de ideale oplossing om prostitutie tegen te gaan, maar is het wel echt een alternatief? Blijven mensen naast de robots ook niet echte prostituees bezoeken? En hoe zit het met seksrobots die het uiterlijk van kinderen hebben. Moeten die verboden worden? Het zijn stuk voor stuk goede vragen die misschien niet direct bij u waren opgekomen, maar die wel van doorslaggevend belang zijn wanneer de robot de samenleving binnendringt.
Eén van de plaatsen waar de robot reeds in opkomst is, is in huis. Sommige mensen hebben bijvoorbeeld al een robotgrasmaaier of een robotstofzuiger. Maar de echte ingewikkelde huishoudelijke klusjes lijken nog niet aan robots besteed. De robots doen er te langzaam over of hebben onze hulp nodig, waardoor het nog altijd efficiënter is om het gewoon zelf te doen. Bovendien is het huishouden eigenlijk nog veel te complex voor de robot. Denk bijvoorbeeld aan het opruimen van de kamer. Een robot moet dan wel weten dat een legosteentje in de legodoos hoort en dat de krant van vandaag nog op tafel moet blijven liggen, terwijl de krant van gisteren bij het oud papier kan. Daar komt nog eens bij dat leven tussen mensen best ongestructureerd is. Een robot moet dan ook kunnen anticiperen op een kind dat opeens door de huiskamer rent of een blouse die van de strijkplank glijdt. En is het eigenlijk wel veilig om een robot in huis te hebben lopen die een keukenmes of stofzuigerstang kan hanteren? Wat als deze even doordraait en zich tegen zijn huisgenoten gaat verzetten? De schrijvers van het boek geloven niet dat de huishoudrobot er op korte termijn komt. Het huishouden is simpelweg te ingewikkeld.
Foto: Honda News (cc via Flickr.com).
In de zorg
Met de toenemende vergrijzing lijken robothanden aan het bed de ideale oplossing. Maar ook daar kunnen we ons wel eens in vergissen, zo schrijven Lambèr Royakkers, Floortje Daemen en Rinie van Est in hun boek. Want kunnen robots patiënten met name op sociaal en emotioneel gebied wel bieden wat zij nodig hebben? En is de zorg wel ondernemend en innovatief genoeg om met de robots aan de slag te gaan? Wie wil daar in investeren? Tegelijkertijd kunnen robots wel een aanvulling op de menselijke zorg vormen. Bijvoorbeeld door te helpen met het tillen van patiënten of door ouderen eraan te herinneren dat zij hun pillen moeten nemen.
Foto: Davide Faconti / Pal Technology (via Wikimedia Commons).
Voorbereiding
Zo gaat het boek verschillende domeinen waarin de robot een rol kan spelen, langs. De robotauto en politierobot komen bijvoorbeeld aan bod. Maar ook de militaire robot wordt besproken. En misschien lijkt het boek soms wat pessimistisch, maar dat is het zeker niet. Het is een realistisch boek dat laat zien welke drempels er nog zijn alvorens robots echt tussen de mensen aan de slag kunnen. Ook wordt er alvast nagedacht over de ethische vraagstukken die we daarbij tegen het lijf kunnen lopen. Het is goed om daar nu al mee bezig te zijn, zo stellen de schrijvers zelf. Ze ontkennen geen moment dat robots soms handig kunnen zijn. Ze belichten alleen ook de keerzijde van de medaille. En dat doen ze op het perfecte moment: nu de robot langzaam maar zeker zijn plekje in de maatschappij zoekt en vindt. Nog voordat de robot echt tussen ons gaat ‘leven’, moeten we weten wat we nodig hebben (bijvoorbeeld aan juridische regels of ethische richtlijnen) en vooral wat we willen. De onderzoekers geven daarbij alvast één gulden handvat mee: de robotica is er voor ons en dient de samenleving te dienen. “Robotica dient de mens niet te overvleugelen, maar bij te staan,” zo schrijven de auteurs. En er zijn nu eenmaal klusjes die we gewoon altijd zelf moeten blijven doen, hoe goed de robot er ook in wordt. Als voorbeeld noemen de onderzoekers het spelen van de ‘Last Post‘: een dagelijks terugkerende traditie in Ieper. Een robot kan dat nu ook al doen, maar verliest zo’n symbool zijn waarde niet als wij er geen tijd meer voor vrijmaken en het door een robot laten doen? “Al kan ene robot iets beter dan een mens, dan nog kan het beter zijn dat de mens het slechter blijft doen.”
‘Overal robots‘ is een wijs boek dat misschien niet alle antwoorden op al uw vragen heeft, maar u wel aan het denken zet en helpt om die antwoorden te vinden. Het is een must read voor iedereen die zich met robotica bezighoudt of bezig gaat houden. Heel concreet betekent dat dat eigenlijk iedereen het gelezen moet hebben. Want de robot komt eraan en dan kunt u maar beter weten wat u allemaal te wachten staat!
(Scientias.nl)
Overal robots: automatisering van de liefde tot de dood

Robots beginnen hun plekje in onze maatschappij op te eisen. Het boek ‘Overal robots’ laat zien wat de consequenties daarvan zijn.
Op dit moment worden robots al volop ingezet, maar hun inzet blijft beperkt. Zo vinden we ze alleen maar binnen de muren van fabrieken. Velen beginnen er nu van overtuigd te raken dat het tijd wordt dat de robot ook buiten die muren een rol gaat vervullen en bijvoorbeeld klusjes in het huishouden gaat doen, een deel van de (ouderen)zorg op zich neemt en ons bijstaat aan het oorlogsfront. Grote vraag is natuurlijk of de robots daar klaar voor zijn. En misschien nog wel belangrijker: zijn wij daar klaar voor?
Automatiseren
Met de inzet van robots in bijvoorbeeld de zorg of het huishouden worden taken die altijd met liefde door mensen zijn uitgevoerd, geautomatiseerd. Willen we dat wel? En kunnen robots dat werk net zo goed doen als wij mensen? Dat zijn vragen waar het boek ‘Overal robots‘ antwoord op probeert te geven. Om dat antwoord te vinden, wordt er gekeken naar ethische overwegingen, de mogelijkheden en onmogelijkheden van de robot en opkomende technologieën. De auteurs beperken zich daarbij tot een aantal domeinen waarbinnen de robot kan worden ingezet: in huis, in de zorg, in de fabriek, bij de politie en in het leger.

Alle kanten
Wanneer wij denken aan een robot die ons wat klussen uit handen neemt, dan zien we dat vaak wel zitten. Het boek ‘Overal robots‘ bekijkt die kwestie echter een stuk nuchterder en laat ons alle kanten van het verhaal zien. Een robot die kookt, is misschien wel handig, maar hoe veilig voelt u zich als u weet dat deze een keukenmes kan hanteren? En een seksrobot lijkt misschien de ideale oplossing om prostitutie tegen te gaan, maar is het wel echt een alternatief? Blijven mensen naast de robots ook niet echte prostituees bezoeken? En hoe zit het met seksrobots die het uiterlijk van kinderen hebben. Moeten die verboden worden? Het zijn stuk voor stuk goede vragen die misschien niet direct bij u waren opgekomen, maar die wel van doorslaggevend belang zijn wanneer de robot de samenleving binnendringt.
Eén van de plaatsen waar de robot reeds in opkomst is, is in huis. Sommige mensen hebben bijvoorbeeld al een robotgrasmaaier of een robotstofzuiger. Maar de echte ingewikkelde huishoudelijke klusjes lijken nog niet aan robots besteed. De robots doen er te langzaam over of hebben onze hulp nodig, waardoor het nog altijd efficiënter is om het gewoon zelf te doen. Bovendien is het huishouden eigenlijk nog veel te complex voor de robot. Denk bijvoorbeeld aan het opruimen van de kamer. Een robot moet dan wel weten dat een legosteentje in de legodoos hoort en dat de krant van vandaag nog op tafel moet blijven liggen, terwijl de krant van gisteren bij het oud papier kan. Daar komt nog eens bij dat leven tussen mensen best ongestructureerd is. Een robot moet dan ook kunnen anticiperen op een kind dat opeens door de huiskamer rent of een blouse die van de strijkplank glijdt. En is het eigenlijk wel veilig om een robot in huis te hebben lopen die een keukenmes of stofzuigerstang kan hanteren? Wat als deze even doordraait en zich tegen zijn huisgenoten gaat verzetten? De schrijvers van het boek geloven niet dat de huishoudrobot er op korte termijn komt. Het huishouden is simpelweg te ingewikkeld.

Foto: Honda News (cc via Flickr.com).
In de zorg
Met de toenemende vergrijzing lijken robothanden aan het bed de ideale oplossing. Maar ook daar kunnen we ons wel eens in vergissen, zo schrijven Lambèr Royakkers, Floortje Daemen en Rinie van Est in hun boek. Want kunnen robots patiënten met name op sociaal en emotioneel gebied wel bieden wat zij nodig hebben? En is de zorg wel ondernemend en innovatief genoeg om met de robots aan de slag te gaan? Wie wil daar in investeren? Tegelijkertijd kunnen robots wel een aanvulling op de menselijke zorg vormen. Bijvoorbeeld door te helpen met het tillen van patiënten of door ouderen eraan te herinneren dat zij hun pillen moeten nemen.

Foto: Davide Faconti / Pal Technology (via Wikimedia Commons).
Voorbereiding
Zo gaat het boek verschillende domeinen waarin de robot een rol kan spelen, langs. De robotauto en politierobot komen bijvoorbeeld aan bod. Maar ook de militaire robot wordt besproken. En misschien lijkt het boek soms wat pessimistisch, maar dat is het zeker niet. Het is een realistisch boek dat laat zien welke drempels er nog zijn alvorens robots echt tussen de mensen aan de slag kunnen. Ook wordt er alvast nagedacht over de ethische vraagstukken die we daarbij tegen het lijf kunnen lopen. Het is goed om daar nu al mee bezig te zijn, zo stellen de schrijvers zelf. Ze ontkennen geen moment dat robots soms handig kunnen zijn. Ze belichten alleen ook de keerzijde van de medaille. En dat doen ze op het perfecte moment: nu de robot langzaam maar zeker zijn plekje in de maatschappij zoekt en vindt. Nog voordat de robot echt tussen ons gaat ‘leven’, moeten we weten wat we nodig hebben (bijvoorbeeld aan juridische regels of ethische richtlijnen) en vooral wat we willen. De onderzoekers geven daarbij alvast één gulden handvat mee: de robotica is er voor ons en dient de samenleving te dienen. “Robotica dient de mens niet te overvleugelen, maar bij te staan,” zo schrijven de auteurs. En er zijn nu eenmaal klusjes die we gewoon altijd zelf moeten blijven doen, hoe goed de robot er ook in wordt. Als voorbeeld noemen de onderzoekers het spelen van de ‘Last Post‘: een dagelijks terugkerende traditie in Ieper. Een robot kan dat nu ook al doen, maar verliest zo’n symbool zijn waarde niet als wij er geen tijd meer voor vrijmaken en het door een robot laten doen? “Al kan ene robot iets beter dan een mens, dan nog kan het beter zijn dat de mens het slechter blijft doen.”
‘Overal robots‘ is een wijs boek dat misschien niet alle antwoorden op al uw vragen heeft, maar u wel aan het denken zet en helpt om die antwoorden te vinden. Het is een must read voor iedereen die zich met robotica bezighoudt of bezig gaat houden. Heel concreet betekent dat dat eigenlijk iedereen het gelezen moet hebben. Want de robot komt eraan en dan kunt u maar beter weten wat u allemaal te wachten staat!
(Scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
22-05-2012
Deze robot ruimt met alle liefde uw huis op
Het huis opruimen: dat huishoudelijke karweitje kunnen we binnenkort wellicht overdragen aan een robot. Dankzij een nieuw algoritme is deze namelijk prima in staat om op te ruimen.
Dat tonen wetenschappers van de Cornell University aan. Ze beschrijven hun studie in het blad International Journal of Robotics.
Moeilijk
Het huis opruimen: het klinkt als een makkelijk klusje. Maar schijn bedriegt. Eerst moet de robot een object identificeren: wat is het en waar hoort het thuis? Vervolgens moet deze het object oppakken en de route naar de eindbestemming uitstippelen. Om dat allemaal mogelijk te maken, ontwikkelden de onderzoekers een nieuw algoritme waarmee de robot kan bepalen met wat voor object deze te maken heeft en waar het object thuishoort. “De robot leert dat een schoen niet in de koelkast thuishoort,” vertelt onderzoeker Yun Jiang in een persbericht.
Camera
De robot is uitgerust met een Microsoft Kinect 3D-camera. Met deze camera kijkt de robot rond. De onderzoekers confronteerden de robot met verschillende varianten van één soort object. Bijvoorbeeld: verschillende kledingstukken of verschillende borden. De robot zoekt naar overeenkomsten tussen die objecten en leert zo welke eigenschappen deze gemeen hebben. Zo kan de robot steeds meer objecten herkennen.
Opbergen
Vervolgens moet de robot een geschikte opbergplaats vinden. Wederom kijkt deze met de camera rond en verzamelt de eigenschappen van verschillende mogelijke opbergplaatsen. De robot beoordeelt deze door te kijken of ze – ook met het oog op de vorm van het op te bergen object – geschikt zijn als opbergplaats voor dit object. Hierbij krijgt de robot wel wat hulp van de onderzoekers. Zij bieden de robot grafische simulaties waarin te zien is hoe het wel en hoe het niet moet. Zo kan de robot leren welke opbergplaatsen geschikt en welke ongeschikt zijn. De opbergplaats die als meest geschikt uit de bus komt, wordt uiteindelijk door de robot gekozen. Vervolgens maakt de robot een grafische simulatie van hoe hij het object uiteindelijk op die eindbestemming gaat krijgen. Daarna voert hij de nodige bewegingen uit.
Experiment
Tijdens de eerste experimenten deed de robot het prima. Objecten die de robot al kende, kon hij in 98 procent van de gevallen identificeren en opbergen. Objecten die de robot nog nooit gezien had, wist deze in 80 procent van de gevallen met succes op te ruimen.
Er is zeker nog ruimte voor verbetering, zo erkennen de onderzoekers. Zo willen ze de robot een nog betere camera geven en zou het ideaal zijn als deze met zijn hand dingen echt kon ‘voelen’. Daarmee wordt het namelijk gemakkelijker om objecten op stabiele wijze neer te zetten en op het juiste moment los te laten. Ook is het nodig dat de robot nog meer over zijn omgeving leert. Een mooi voorbeeld is het opbergen van de computermuis. Deze kan natuurlijk overal op uw bureau worden neergelegd, maar moet idealiter naast de pc worden gelegd. Een robot weet dat nu niet, maar door meer te leren over zijn omgeving kan hij objecten mogelijk ook met elkaar gaan associëren.
(scientias.nl)
Deze robot ruimt met alle liefde uw huis op

Het huis opruimen: dat huishoudelijke karweitje kunnen we binnenkort wellicht overdragen aan een robot. Dankzij een nieuw algoritme is deze namelijk prima in staat om op te ruimen.
Dat tonen wetenschappers van de Cornell University aan. Ze beschrijven hun studie in het blad International Journal of Robotics.
Moeilijk
Het huis opruimen: het klinkt als een makkelijk klusje. Maar schijn bedriegt. Eerst moet de robot een object identificeren: wat is het en waar hoort het thuis? Vervolgens moet deze het object oppakken en de route naar de eindbestemming uitstippelen. Om dat allemaal mogelijk te maken, ontwikkelden de onderzoekers een nieuw algoritme waarmee de robot kan bepalen met wat voor object deze te maken heeft en waar het object thuishoort. “De robot leert dat een schoen niet in de koelkast thuishoort,” vertelt onderzoeker Yun Jiang in een persbericht.
Camera
De robot is uitgerust met een Microsoft Kinect 3D-camera. Met deze camera kijkt de robot rond. De onderzoekers confronteerden de robot met verschillende varianten van één soort object. Bijvoorbeeld: verschillende kledingstukken of verschillende borden. De robot zoekt naar overeenkomsten tussen die objecten en leert zo welke eigenschappen deze gemeen hebben. Zo kan de robot steeds meer objecten herkennen.
Opbergen
Vervolgens moet de robot een geschikte opbergplaats vinden. Wederom kijkt deze met de camera rond en verzamelt de eigenschappen van verschillende mogelijke opbergplaatsen. De robot beoordeelt deze door te kijken of ze – ook met het oog op de vorm van het op te bergen object – geschikt zijn als opbergplaats voor dit object. Hierbij krijgt de robot wel wat hulp van de onderzoekers. Zij bieden de robot grafische simulaties waarin te zien is hoe het wel en hoe het niet moet. Zo kan de robot leren welke opbergplaatsen geschikt en welke ongeschikt zijn. De opbergplaats die als meest geschikt uit de bus komt, wordt uiteindelijk door de robot gekozen. Vervolgens maakt de robot een grafische simulatie van hoe hij het object uiteindelijk op die eindbestemming gaat krijgen. Daarna voert hij de nodige bewegingen uit.

Experiment
Tijdens de eerste experimenten deed de robot het prima. Objecten die de robot al kende, kon hij in 98 procent van de gevallen identificeren en opbergen. Objecten die de robot nog nooit gezien had, wist deze in 80 procent van de gevallen met succes op te ruimen.
Er is zeker nog ruimte voor verbetering, zo erkennen de onderzoekers. Zo willen ze de robot een nog betere camera geven en zou het ideaal zijn als deze met zijn hand dingen echt kon ‘voelen’. Daarmee wordt het namelijk gemakkelijker om objecten op stabiele wijze neer te zetten en op het juiste moment los te laten. Ook is het nodig dat de robot nog meer over zijn omgeving leert. Een mooi voorbeeld is het opbergen van de computermuis. Deze kan natuurlijk overal op uw bureau worden neergelegd, maar moet idealiter naast de pc worden gelegd. Een robot weet dat nu niet, maar door meer te leren over zijn omgeving kan hij objecten mogelijk ook met elkaar gaan associëren.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
08-06-2012
Robotvis kan vriendjes worden met echte vis
Voor het eerst tonen wetenschappers middels experimenten aan dat een robotvis echte zebravissen aan kan trekken en het gedrag van deze vissen kan beïnvloeden. En dat biedt mogelijkheden.
Amerikaanse en Italiaanse onderzoekers ontwikkelden een vijftien centimeter lange robotvis. Ze gaven de robot dezelfde kleuren als de zebravis. De staart van de robot kon op ongeveer dezelfde manier als de staart van de zebravis bewegen. De buik van de robot was extra rond gemaakt: daarmee leek de robot op een vruchtbare, vrouwelijke zebravis. Dat maakte de robot in theorie aantrekkelijker voor zowel mannelijke als vrouwelijke zebravissen.
Drie vakken
Grote vraag was natuurlijk of deze robot vrienden zou kunnen worden met echte zebravissen. De onderzoekers namen de proef op de som. Ze lieten de robot in een bak met water zakken. Die bak was opgedeeld in drie vakken. Vervolgens werden er verschillende experimenten uitgevoerd. De robot werd bijvoorbeeld in het linkse vak geplaatst. Het rechtse vak bleef leeg of er werd één vis in geplaatst. En in het midden werd een school zebravissen of één zebravis losgelaten. De vissen in het midden konden door een gaatje naar het rechtse of linkse vak zwemmen.
Goede vraag
Worden we asociaal van robots? Lees er hier alles over!Resultaten
Wanneer de vissen in het middelste vak moesten kiezen tussen de robot of een echte vis, dan zwommen ze toch naar het vak met daarin de echte zebravis. Maar wanneer ze moesten kiezen tussen een leeg vak en de robot, won de robot. En wanneer er in het midden één vis werd losgelaten, zocht deze ook liever de robot dan het lege vak op, zo meldt het blad Bioinspiration & Biomimetics.
Beweging van de staart
De onderzoekers denken wel te kunnen verklaren waarom de robotvis zo aantrekkelijk is voor de zebravissen. Het slaan van de staart, de ronde vorm en de kleuren leken van doorslaggevend belang. Het geluid van de motor die zich in de robot bevond, maakte deze wel iets minder onaantrekkelijk voor echte vissen.
Het onderzoek is heel belangrijk. Want wanneer een robotvis het gedrag van echte vissen kan beïnvloeden, dan biedt dat mogelijkheden. Zo kunnen robotvissen bijvoorbeeld ingezet worden om bedreigde vissoorten – door hun gedrag te beïnvloeden – te beschermen.
.
(scientias.nl)
Robotvis kan vriendjes worden met echte vis

Voor het eerst tonen wetenschappers middels experimenten aan dat een robotvis echte zebravissen aan kan trekken en het gedrag van deze vissen kan beïnvloeden. En dat biedt mogelijkheden.
Amerikaanse en Italiaanse onderzoekers ontwikkelden een vijftien centimeter lange robotvis. Ze gaven de robot dezelfde kleuren als de zebravis. De staart van de robot kon op ongeveer dezelfde manier als de staart van de zebravis bewegen. De buik van de robot was extra rond gemaakt: daarmee leek de robot op een vruchtbare, vrouwelijke zebravis. Dat maakte de robot in theorie aantrekkelijker voor zowel mannelijke als vrouwelijke zebravissen.
Drie vakken
Grote vraag was natuurlijk of deze robot vrienden zou kunnen worden met echte zebravissen. De onderzoekers namen de proef op de som. Ze lieten de robot in een bak met water zakken. Die bak was opgedeeld in drie vakken. Vervolgens werden er verschillende experimenten uitgevoerd. De robot werd bijvoorbeeld in het linkse vak geplaatst. Het rechtse vak bleef leeg of er werd één vis in geplaatst. En in het midden werd een school zebravissen of één zebravis losgelaten. De vissen in het midden konden door een gaatje naar het rechtse of linkse vak zwemmen.
Goede vraag
Worden we asociaal van robots? Lees er hier alles over!Resultaten
Wanneer de vissen in het middelste vak moesten kiezen tussen de robot of een echte vis, dan zwommen ze toch naar het vak met daarin de echte zebravis. Maar wanneer ze moesten kiezen tussen een leeg vak en de robot, won de robot. En wanneer er in het midden één vis werd losgelaten, zocht deze ook liever de robot dan het lege vak op, zo meldt het blad Bioinspiration & Biomimetics.
Beweging van de staart
De onderzoekers denken wel te kunnen verklaren waarom de robotvis zo aantrekkelijk is voor de zebravissen. Het slaan van de staart, de ronde vorm en de kleuren leken van doorslaggevend belang. Het geluid van de motor die zich in de robot bevond, maakte deze wel iets minder onaantrekkelijk voor echte vissen.
Het onderzoek is heel belangrijk. Want wanneer een robotvis het gedrag van echte vissen kan beïnvloeden, dan biedt dat mogelijkheden. Zo kunnen robotvissen bijvoorbeeld ingezet worden om bedreigde vissoorten – door hun gedrag te beïnvloeden – te beschermen.
.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
09-06-2012
Gaan voetbalrobots de WK-kampioen in 2050 verslaan?
Vergeet het reguliere voetbal! Voetbalrobots zijn wereldwijd in opkomst en zullen volgens de makers in 2050 het winnende team van het FIFA Wereld Kampioenschap voetbal (WK) gaan verslaan.
Op de Technische Universiteit (TU) Eindhoven werken studenten mee aan het project RoboCup. Dit internationale project stimuleert deelnemers om ieder jaar de robotica techniek te verbeteren en wel door de robots te laten voetballen. Jaarlijks wordt het WK robotvoetbal georganiseerd, waar tientallen landen aan meedoen. Ieder jaar worden de regels steeds moeilijker gemaakt zodat ieder land wordt gestimuleerd om de robots steeds ‘menselijker’ te laten voetballen. Uiteindelijk is het doel om in 2050 het winnende (menselijke) team van het WK met robots te verslaan.
De TURTLE voetbalrobot met daarachter de keeper, die de bal tegenhoudt met een beweegbaar rek. Foto gemaakt door Tech United.
Wereldkampioen
Nederland wordt vertegenwoordigd door Tech United, de makers van de TURTLEs (Tech United RoboCup Team Limited Edition). “Zes jaar geleden zijn we begonnen” vertelt Wouter Houtman, één van de teamleden aan Scientias.nl. “Sindsdien spelen we mee met het WK robotvoetbal”. Houtman en zijn team reizen de hele wereld over met hun voetbalrobots. “We hebben onder andere in Istanbul gespeeld en dit jaar gaan we naar Mexico. Op 18 juni vertrekken we, en hopelijk worden we dit jaar wel wereldkampioen!” Tech United is volgens Houtman een voorloper op het gebied van robottechniek maar de wereldtitel hebben ze nog niet te pakken gekregen. Ze zijn al vier jaar op rij tweede geworden. “We moeten oppassen voor Iran, China en Portugal, zij zijn heel erg goed.”
Autonoom
De robots spelen in teams van vijf op een tapijten voetbalveld van 18 bij 12 meter. Ze zijn geheel autonoom en er komt dus geen besturing aan te pas. De voetbalrobot weet precies waar de bal is, hoe hij die te pakken kan krijgen en vervolgens weg kan schieten naar een ander teamlid of in het doel om te scoren. Hij doet dit aan de hand van zijn geprogrammeerde rol: aanvaller, verdediger en keeper. De robots weten ook waar de tegenstander is en kunnen deze omzeilen om de bal niet te verliezen. “Onze robot, de TURTLE, heeft een ingebouwde camera die 360 graden kan zien, dus hij ziet alle hoeken van het veld. Hij rijdt op speciale wieltjes, waarmee hij om zijn eigen as kan draaien. De balbehandeling wordt gevormd door kleine wieltjes voorop de robot, hiermee dribbelt hij met de bal. En schieten doet hij met de schietlepel, deze schiet tegen de bal aan waarmee een lobje of vlak schot gemaakt kan worden.” vertelt Robin Soetens, de teamleider van het Middle Size team, de league waar de voetbalrobots in spelen. De ‘voetballers’ herkennen de bal, hun medespelers en tegenspelers door middel van kleur. Maar in de toekomst moet de robot vormen en objecten gaan herkennen en op gras kunnen spelen. “We zijn er al in geslaagd om de robots de doelen te laten herkennen. Eerst was het ene doel blauw en het ander geel, nu zijn beide wit. We hebben dit voor elkaar gekregen door middel van een kompas. Door het magnetisch veld onder de aarde weet de robot in welk doel hij moet schieten. Dit veld moet dan ook niet verstoord raken, want dan ontstaan er meteen problemen.” De robots kunnen zelfs de bal van elkaar afpakken. “Als de ene voetbalrobot met de bal voor zich uit rijdt kan een tegenstander de bal onderscheppen door deze vast te pakken met de balbehandeling. Maar zo makkelijk gaat dat niet: want de balbezitter zal de bal proberen terug te trekken. Het is dan een kwestie van wie de meeste kracht geeft.”
Tech United is alvast bezig met een nieuw prototype van de TURTLE, zodat deze in de toekomst ook op echt gras kan spelen. Een robot op zes poten zou een oplossing kunnen zijn.
Regels
De ieder jaar veranderende regels zorgen er voor dat teams hun robots steeds ‘menselijker’ laten voetballen. Uiteindelijk moeten de robots er in 2050 uitzien als een mens en met de beperkingen van een mens kunnen voetballen. “Zo moeten ze dan twee ogen hebben in plaats van de huidige camera. Het spel wordt realistischer: de robots kunnen dan alleen nog maar zien wat menselijke ogen ook zien,” zegt Sietens. Dit jaar is de belangrijkste nieuwe regel dat de robots de bal moeten pasen. Houtman: “Ze mogen niet meer van de ene kant naar de andere kant van het veld met de bal rijden. De robots doen dat nu terwijl ze bijna helemaal stil staan. In de toekomst willen we dat ze al rijdend de bal kunnen pasen.” Tech United heeft ook één van zijn winnende trucjes moeten opgeven. “We lieten de robot door de actieve balbehandeling achteruit rijden naar het doel en pas op het laatste moment omdraaien om vervolgens te scoren. De keeper kon de bal niet zien en hiermee hebben we een hoop wedstrijden gewonnen. Omdat wel meerdere teams dit door hadden is de regel dat er nog maximaal één meter naar achteren gereden mag worden.” Tijdens een potje robotvoetbal worden ook gele en rode kaarten uitgedeeld, net zoals bij echt voetbal. Gele kaarten worden meestal gegeven als de robots te agressief zijn geprogrammeerd of expres tegen elkaar opbotsen.
Zorgrobot Amigo, die veel technieken van de TURTLE heeft overgenomen. Foto gemaakt door Tech United.
Open source
Gezamenlijk hebben alle robotmakers ter wereld afgesproken informatie te delen in een soort van online robotdatabase. Daar worden dan hardware en software op gepubliceerd. De techniek die voortkomt uit het voetbalproject kan ook worden gebruikt voor bijvoorbeeld de bouw van zorg- en huishoudelijke robots. Zo heeft de zorgrobot Amigo van TU Eindhoven veel technieken van de TURTLE overgenomen.
Naast het WK robotvoetbal doet Tech United ook mee aan Europese toernooien. Afgelopen maand april hebben ze zelfs een eigen toernooi georganiseerd in Eindhoven: de Dutch Open. Het meest belangrijke dit aankomende WK is volgens Houtman dat de TURTLE goed gaat pasen. “Ze moeten echt gaan samenspelen: de bal naar elkaar overspelen en vrije ruimten opzoeken. Het pasen lukt al wel maar er gaat toch nog wel eens het een en ander mis. Het spel moet vlotter en dynamischer worden.” Bent u benieuwd hoe Nederland het gaat doen op het WK robotvoetbal? Op de website van Tech United kunt u de wedstrijden livestream volgen! Volgend jaar heeft u zelfs de kans om de voetbalrobots live in actie te zien want dan wordt het WK waarschijnlijk in Nederland gehouden.
(scientias.nl)
Gaan voetbalrobots de WK-kampioen in 2050 verslaan?

Vergeet het reguliere voetbal! Voetbalrobots zijn wereldwijd in opkomst en zullen volgens de makers in 2050 het winnende team van het FIFA Wereld Kampioenschap voetbal (WK) gaan verslaan.
Op de Technische Universiteit (TU) Eindhoven werken studenten mee aan het project RoboCup. Dit internationale project stimuleert deelnemers om ieder jaar de robotica techniek te verbeteren en wel door de robots te laten voetballen. Jaarlijks wordt het WK robotvoetbal georganiseerd, waar tientallen landen aan meedoen. Ieder jaar worden de regels steeds moeilijker gemaakt zodat ieder land wordt gestimuleerd om de robots steeds ‘menselijker’ te laten voetballen. Uiteindelijk is het doel om in 2050 het winnende (menselijke) team van het WK met robots te verslaan.

De TURTLE voetbalrobot met daarachter de keeper, die de bal tegenhoudt met een beweegbaar rek. Foto gemaakt door Tech United.
Wereldkampioen
Nederland wordt vertegenwoordigd door Tech United, de makers van de TURTLEs (Tech United RoboCup Team Limited Edition). “Zes jaar geleden zijn we begonnen” vertelt Wouter Houtman, één van de teamleden aan Scientias.nl. “Sindsdien spelen we mee met het WK robotvoetbal”. Houtman en zijn team reizen de hele wereld over met hun voetbalrobots. “We hebben onder andere in Istanbul gespeeld en dit jaar gaan we naar Mexico. Op 18 juni vertrekken we, en hopelijk worden we dit jaar wel wereldkampioen!” Tech United is volgens Houtman een voorloper op het gebied van robottechniek maar de wereldtitel hebben ze nog niet te pakken gekregen. Ze zijn al vier jaar op rij tweede geworden. “We moeten oppassen voor Iran, China en Portugal, zij zijn heel erg goed.”
Autonoom
De robots spelen in teams van vijf op een tapijten voetbalveld van 18 bij 12 meter. Ze zijn geheel autonoom en er komt dus geen besturing aan te pas. De voetbalrobot weet precies waar de bal is, hoe hij die te pakken kan krijgen en vervolgens weg kan schieten naar een ander teamlid of in het doel om te scoren. Hij doet dit aan de hand van zijn geprogrammeerde rol: aanvaller, verdediger en keeper. De robots weten ook waar de tegenstander is en kunnen deze omzeilen om de bal niet te verliezen. “Onze robot, de TURTLE, heeft een ingebouwde camera die 360 graden kan zien, dus hij ziet alle hoeken van het veld. Hij rijdt op speciale wieltjes, waarmee hij om zijn eigen as kan draaien. De balbehandeling wordt gevormd door kleine wieltjes voorop de robot, hiermee dribbelt hij met de bal. En schieten doet hij met de schietlepel, deze schiet tegen de bal aan waarmee een lobje of vlak schot gemaakt kan worden.” vertelt Robin Soetens, de teamleider van het Middle Size team, de league waar de voetbalrobots in spelen. De ‘voetballers’ herkennen de bal, hun medespelers en tegenspelers door middel van kleur. Maar in de toekomst moet de robot vormen en objecten gaan herkennen en op gras kunnen spelen. “We zijn er al in geslaagd om de robots de doelen te laten herkennen. Eerst was het ene doel blauw en het ander geel, nu zijn beide wit. We hebben dit voor elkaar gekregen door middel van een kompas. Door het magnetisch veld onder de aarde weet de robot in welk doel hij moet schieten. Dit veld moet dan ook niet verstoord raken, want dan ontstaan er meteen problemen.” De robots kunnen zelfs de bal van elkaar afpakken. “Als de ene voetbalrobot met de bal voor zich uit rijdt kan een tegenstander de bal onderscheppen door deze vast te pakken met de balbehandeling. Maar zo makkelijk gaat dat niet: want de balbezitter zal de bal proberen terug te trekken. Het is dan een kwestie van wie de meeste kracht geeft.”
Tech United is alvast bezig met een nieuw prototype van de TURTLE, zodat deze in de toekomst ook op echt gras kan spelen. Een robot op zes poten zou een oplossing kunnen zijn.

Regels
De ieder jaar veranderende regels zorgen er voor dat teams hun robots steeds ‘menselijker’ laten voetballen. Uiteindelijk moeten de robots er in 2050 uitzien als een mens en met de beperkingen van een mens kunnen voetballen. “Zo moeten ze dan twee ogen hebben in plaats van de huidige camera. Het spel wordt realistischer: de robots kunnen dan alleen nog maar zien wat menselijke ogen ook zien,” zegt Sietens. Dit jaar is de belangrijkste nieuwe regel dat de robots de bal moeten pasen. Houtman: “Ze mogen niet meer van de ene kant naar de andere kant van het veld met de bal rijden. De robots doen dat nu terwijl ze bijna helemaal stil staan. In de toekomst willen we dat ze al rijdend de bal kunnen pasen.” Tech United heeft ook één van zijn winnende trucjes moeten opgeven. “We lieten de robot door de actieve balbehandeling achteruit rijden naar het doel en pas op het laatste moment omdraaien om vervolgens te scoren. De keeper kon de bal niet zien en hiermee hebben we een hoop wedstrijden gewonnen. Omdat wel meerdere teams dit door hadden is de regel dat er nog maximaal één meter naar achteren gereden mag worden.” Tijdens een potje robotvoetbal worden ook gele en rode kaarten uitgedeeld, net zoals bij echt voetbal. Gele kaarten worden meestal gegeven als de robots te agressief zijn geprogrammeerd of expres tegen elkaar opbotsen.

Zorgrobot Amigo, die veel technieken van de TURTLE heeft overgenomen. Foto gemaakt door Tech United.
Open source
Gezamenlijk hebben alle robotmakers ter wereld afgesproken informatie te delen in een soort van online robotdatabase. Daar worden dan hardware en software op gepubliceerd. De techniek die voortkomt uit het voetbalproject kan ook worden gebruikt voor bijvoorbeeld de bouw van zorg- en huishoudelijke robots. Zo heeft de zorgrobot Amigo van TU Eindhoven veel technieken van de TURTLE overgenomen.
Naast het WK robotvoetbal doet Tech United ook mee aan Europese toernooien. Afgelopen maand april hebben ze zelfs een eigen toernooi georganiseerd in Eindhoven: de Dutch Open. Het meest belangrijke dit aankomende WK is volgens Houtman dat de TURTLE goed gaat pasen. “Ze moeten echt gaan samenspelen: de bal naar elkaar overspelen en vrije ruimten opzoeken. Het pasen lukt al wel maar er gaat toch nog wel eens het een en ander mis. Het spel moet vlotter en dynamischer worden.” Bent u benieuwd hoe Nederland het gaat doen op het WK robotvoetbal? Op de website van Tech United kunt u de wedstrijden livestream volgen! Volgend jaar heeft u zelfs de kans om de voetbalrobots live in actie te zien want dan wordt het WK waarschijnlijk in Nederland gehouden.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
14-06-2012
Menselijke machines
Wat de computerwetenschap en robotici kunnen leren van de mens
In de serie ‘wetenschap van de 21e eeuw’ worden vakgebieden uitgelicht die laatste jaren bol staan van de nieuwe ontwikkelingen. Dit keer legt Frank van der Velde uit hoe computers en robots nog “slimmer” kunnen worden gemaakt door goed te kijken naar de psychologie en fysiologie van de mens.
© Facontidavide / Wikimedia
In de jaren '50 droomde men van superslimme, mensachtige computers en robots. Inmiddels zijn computers beter dan wij in spelletjes als schaken en jeopardy. Maar waar blijven de robots die echt alles kunnen wat een mens kan? (Op de foto: de robot REEM-A.)
Zullen computers of robots ooit écht op mensen gaan lijken? En dan niet per se qua uiterlijk, maar wat betreft hun vermogens? Dit was de ultieme droom ten tijde van de opkomst van computers en kunstmatige intelligentie, in de jaren ’50 van de vorige eeuw. Maar ruim een halve eeuw later is de ontwikkeling van dergelijke mensachtige machines ogenschijnlijk nog weinig opgeschoten.
Professor Frank van der Velde is niet eens met de stelling dat kunstmatige intelligentie (AI) nog weinig voorstelt. Of, zoals een kritische bezoeker onlangs op deze website opmerkte, dat het nog altijd een kwestie is van relatief simpele databases en programmeerregels. Van der Velde: ‘Als je het heel cru wilt stellen is dit inderdaad het enige wat een “intelligente” computer als Watson, die niet zo lang geleden in staat bleek om het spel Jeopardy te winnen, doet. Maar ook dit is niet zo triviaal als het lijkt. Je hebt hiervoor bijvoorbeeld wel geavanceerde zoekstrategieën nodig. Er begint bovendien wel degelijk inzicht te ontstaan in hoe neurale systemen werken, hoe waarneming werkt, hoe aandachtsprocessen werken. Het is wel nog heel moeilijk om dit in te bouwen in een computer, onder andere door beperkingen van de hardware.’
Van der Velde is zowel psycholoog als natuurkundige. Op het eerste gezicht heeft psychologie misschien weinig met robotica te maken. Maar Van der Velde houdt zich aan de Technische Universiteit Twente bezig met een vakgebied genaamd technische cognitie. Kort gezegd komt het erop neer dat hij kijkt hoe je de manier waarop intelligentie en hersenprocessen bij mensen werken, inclusief hun fysiologie (dus hoe onze hersenen biologisch in elkaar zitten), kunt toepassen in technische systemen. Waaronder robots.
Alan Turing, grondlegger van de computerwetenschap en kunstmatige intelligentie. Dit jaar (2012) is het Turingjaar, om de honderdste geboortedag van de in 1954 overleden wiskundige te herdenken.
Turing Machine
Ontwikkelingen in de psychologie en de computerwetenschap gaan eigenlijk al decennia lang min of meer hand in hand, zo legt Van der Velde uit. Rond de tijd dat computers opkwamen, maakte binnen de psychologie het zogenoemde behaviorisme plaats voor de cognitieve psychologie. Waarbij niet alleen van buitenaf werd gekeken naar menselijk gedrag, maar juist ook werd geprobeerd te kijken hoe menselijk gedrag van binnen, in de hersenen, tot stand komt. Het idee dat toen ontstond was dat menselijke hersenen eigenlijk net zo werken als een computer.
Van der Velde: ‘Bij computers geldt het idee dat een programma, waarmee je iets doet, en de data eigenlijk hetzelfde zijn. Het zijn allebei data. Alleen interpreteert de computer het ene stukje data als het programma, en het andere stukje als data die door het programma wordt verwerkt. Turing heeft dit destijds ook laten zien met zijn Universal Turing Machine. Dus toen was het idee: misschien werkt menselijke cognitie ook zo. Cognitie is het verwerken van data, en wij hebben programma’s in ons hoofd die dit doen. Dus eigenlijk hoef ik alleen de regels van het programma te kennen, om te weten hoe cognitie werkt.’
En als je die regels van de menselijke cognitie eenmaal kent, kun je die ook in een computer stoppen, zo was het idee. Maar gaandeweg kwam men erachter dat het toch niet helemaal zo werkte. Van der Velde: ‘Het bleek ontzettend moeilijk om op deze manier computerprogramma’s te maken, en dan vooral programma’s die zich flexibel kunnen aanpassen aan hun omgeving. Het blijft toch de programmeur die de regels moet inprogrammeren; maar je kunt gewoon niet alle mogelijkheden voor zijn.’ Met andere woorden: als je bijvoorbeeld een robot wilt programmeren, kun je nooit regeltjes inprogrammeren voor alle mogelijke situaties waar die robot tegenaan kan lopen als je hem loslaat in de wereld.
In de tussentijd groeide ook het inzicht in de menselijke psychologie en in hoe onze hersenen werken. Rond het begin van de jaren ‘90 kwam er daarom een nieuwe stroming op in de computerwetenschap, die meende dat je nog meer letterlijk naar de structuur van het brein moet kijken om menselijke intelligentie te kunnen benaderen. Van der Velde: ‘Het idee dat je met het schrijven van een computerprogramma menselijke intelligentie benadert, heeft in zoverre ingeboet, dat men inmiddels wel door heeft dat zulke computerprogramma’s ook lerende capaciteiten moeten hebben. En dat ze bijvoorbeeld om moeten kunnen gaan met kansberekening, en waarschijnlijkheidsregels.’
© Karl Palutke / Wikimedia
'Drop it! Dead or alive, you are coming with me.' Robocop was in de gelijknamige film half mens, half robot. Daarom kon hij ontsnappen van een echte robot door een trappenhuis in te vluchten. Voor klassieke robots was traplopen een onmogelijke opgave.
Robocop
Ook in andere opzichten groeide het idee dat je, om bijvoorbeeld echt mensachtige robots te kunnen bouwen, nog meer letterlijk moet kijken naar hoe dingen bij de mens werken. Zoals in het geval van robots die kunnen lopen. Van der Velde: ‘In het begin van de robotica lieten ze robots van tevoren uitrekenen hoe ze moesten stappen. Letterlijk. Dan moet die hoek zo, en dan zit de geometrie zo, en dan... Dat was een drama! Paul Verhoeven, die zelf wiskunde heeft gestudeerd, drijft in zijn films vaak de spot met zulke klassieke AI, is me opgevallen. Een mooi voorbeeld vind je in zijn film Robocop [uit 1987, red]. In die film speelt, naast die agent die een mengeling is van robotica en een mens, ook een echte robot. Op het eind van de film is er een gevecht tussen robocop en die joekel van een robot. Robocop ziet alle hoeken van de kamer, tot hij op een gegeven moment een trappenhuis in vlucht. Dat moment, dat is een heel typische scène, daarbij moet ik altijd denken aan die klassieke AI robots. Je ziet dan die grote robot staan, bovenaan die trap. En je ziet hem bijna denken: “O jee, wat moet ik? Help!” Je ziet hem rekenen. Nu moet ik mijn been een stap lager zetten. Hoe doe ik dat? Hij vertraagt ook helemaal, want hij rekent zich suf. En dan zet hij één stap, en dat lukt nog. En dan wil hij zijn andere been erbij zetten. Maar binnen de kortste keren lukt het niet meer. En dan dondert hij naar beneden.’
Bij mensen werkt lopen heel anders. Wij denken er sowieso niet bewust bij na hoe we onze benen moeten verplaatsen. En we krijgen tijdens het lopen continu feedback van onder meer onze tastzenuwen. Van der Velde: ‘De Australische computerwetenschapper Rodney Brooks is een van de eersten geweest die heeft laten zien dat er heel veel dynamica zit in spiercellen en in de mechanica van je been. Waardoor je been als het ware passief reageert op wat je voelt. En je op die manier stabiel houdt. Hij heeft ook laten zien dat je bij robots via vrij eenvoudige, mechanische aanpassingen loopgedrag kunt krijgen dat al veel beter werkt.’ De laatste jaren is dit inzicht steeds verder uitgewerkt. Waardoor er inmiddels robots kunnen worden gebouwd die wel kunnen traplopen. En zelfs robots die over moeilijk terrein, zoals rotsen of het puin van ingestorte gebouwen, kunnen lopen (filmpje).
© Ylem / Wikimedia
Het lijkt zo simpel: je kijkt ergens naar, en je hersenen zeggen je: 'hé, dat is een stoel' of 'dat is het gezicht van je geliefde'. Maar eigenlijk is iets 'zien' een enorm ingewikkeld proces, waarbij de informatie uit je oog stapje voor stapje wordt verwerkt.
Zien
Iets soortgelijks speelt bij de manier waarop wij mensen voorwerpen en omgeving kunnen zien, en technieken voor de verwerking van visuele informatie door computers en robots. Van der Velde: ‘Wat de laatste jaren duidelijk is geworden, is dat het herkennen van een voorwerp heel geleidelijk gaat. Vroeger ging dat fout. Toen dacht men: dat gaat in één keer. Dus je krijgt een beeld binnen, en zet daar een systeem op dat die beelden kan classificeren. Maar dat is ondoenlijk. Gewoon ondoenlijk. En dat is, zoals breinonderzoek laat zien, ook niet wat er bij mensen gebeurt. Wat je in het brein ziet is dat het beeld geleidelijk aan wordt opgebouwd, stapje voor stapje.’ Als er een beeld op het netvlies van je oog valt, zo is inmiddels dus duidelijk, “zien” de hersencellen die als eerste deze informatie binnenkrijgen alleen een soort contraststipjes. De hersencellen die een niveau hoger werken weten de stipjes om te zetten in lijnen, en zo steeds verder, tot na een stap of tien er misschien hersencellen zijn die merken: ‘hé, al die informatie bij elkaar, dat is een gezicht’.
En dan is er nog het gegeven van aandacht. Wij mensen zien nooit letterlijk onze hele omgeving; eigenlijk zien we alleen datgene waar we onze aandacht op richten echt goed. De rest wordt door onze hersenen op een vrij grove manier ingevuld. Daarom is het ook zo makkelijk om mensen voor te gek te houden met bijvoorbeeld filmpjes waarin plotseling een gorilla door het beeld loopt, of de presentator opeens hele andere kleren aan heeft, zonder dat degene die naar zo’n filmpje kijkt dit merkt. Bovendien wordt onze aandacht – en daarmee wat we zien – vaak aangetrokken door bijvoorbeeld beweging. Dit soort inzichten in de menselijke manier van zien worden de laatste jaren bijvoorbeeld toegepast in slimme systemen voor beveiligingscamera's.
© Lorenzo Natale / Wikimedia
De iCub is mensachtige robot ter grootte van een kleuter. Frank van de Velde hoopt er met zijn vakgroep een aan te kunnen schaffen, om hun ideeën in praktijk te kunnen testen.
iCub
Het onderzoek van Van der Velde zelf richt zich ook voornamelijk op waarneming en op aandachtsprocessen. Zijn vakgroep heeft op het moment een subsidieaanvraag lopen om een mensachtige robot genaamd een iCub te kunnen aanschaffen. Zodat zij en andere vakgroepen binnen de TU Twente allerlei ideeën in praktijk kunnen testen. Het belangrijkste doel van Van der Velde is om deze robot concepten aan te leren, zoals begrip van werkwoorden als ‘pak’, of van wat boven of onder is. En hoe zulke concepten zich tot elkaar verhouden. Maar dit alles dan wel zonder letterlijke regels in te programmeren voor die concepten. Het is dus eigenlijk de bedoeling dat de robot dit soort dingen gaat leren op dezelfde manier als menselijke baby’s of kinderen leren hoe de wereld werkt.
Voor de komende tien jaar verwacht Van der Velde ook veel van ontwikkelingen aan de hardwarekant in plaats van in de software. Bijvoorbeeld op het vlak van parallelle informatieverwerking. Onze menselijke hersenen zijn zo snel, omdat allerlei onderdelen van onze hersenen tegelijkertijd informatie kunnen verwerken, parallel dus. Maar bij een computer moet alle informatie verwerkt worden door de processor, die in feite maar één berekening tegelijk kan doen. Dus ongeacht hoe de informatie binnenkomt, uiteindelijk moet het allemaal netjes op een rij door de processor verwerkt worden. Dit kan dan wel relatief snel – om precies te zijn, met de kloksnelheid van de processor. Als je een processor hebt met een kloksnelheid van pakweg 2 GHz, kan deze 2 miljard berekeningen per seconde uitvoeren. Maar door dit één voor één verwerken van piepkleine stukjes informatie zijn computers in bepaalde opzichten toch langzamer dan menselijke hersenen. Computers met een dual core of quad core processor werken met twee of vier processoren, en kunnen twee tot vier van die informatiestromen tegelijk aan. Maar dit is nog steeds relatief weinig.
© PD-USGOV / Wikimedia
Menselijke neuronen (hersencellen) communiceren met elkaar via zogenoemde synapsen. De ene cel laat een chemische stof los in een kleine ruimte tussen de cellen, waarna de andere cel dit waarneemt. Door meer of minder van zo'n signaalstof af te geven, kunnen hersencellen een sterker of zwakker signaal doorgeven. Biologische hardware
Tijdens het interview haalt Van der Velde ook regelmatig een recent gepubliceerd onderzoek aan waarin de schakeling tussen menselijke neuronen is nagebouwd met behulp van nano-materialen. Menselijke neuronen, oftewel hersencellen, staan met elkaar in verbinding via zogenoemde synapsen. Die synapsen kunnen er via een chemisch proces voor zorgen dat een signaal dat van de ene op de andere hersenencel wordt doorgegeven sterker of zwakker is. Synapsen spelen ook een rol bij de aanleg van netwerkstructuren in je hersenen, waardoor je verbinding kunt leggen tussen allerlei verschillende concepten. Bijvoorbeeld wat een kat is, welke eigenschappen dit dier zoal heeft. En wat een hond is. En dat honden en katten vaak niet zo goed samengaan.
Het staat nog in de kinderschoenen, maar in theorie is iets dergelijks ook mogelijk met de door Van der Velde aangehaalde nano-materialen. Van der Velde: ‘Het gaat hier het om materialen die, als je er stroom dooreen laat lopen, als het ware onthouden dat die stroom er doorheen is gelopen. Waarna ze de volgende keer minder weerstand hebben. Je zou dit biologische hardware kunnen noemen. Zo noemen degenen die dit onderzoek hebben uitgevoerd het ook: “brain-like”. “Brain-inspired computing is an emerging field”, schrijven ze hier. Je kunt hiermee hardware maken die zich configureert als er activiteit plaatsvindt. Die kan leren. En die dat ook vasthoudt. Net als je geheugen, zegmaar.’
Als het op een gegeven moment mogelijk wordt om computers te maken met zulk soort hardeware, hoeven die dus ook niet meer zoals klassieke computers te werken met enen en nullen. De schakelingen kunnen ook met andere waardes werken, ergens tussen de nul (wat in de klassieke computertechnologie staat voor geen stroompje) en de één (volledige stroomsterkte) in. Wat ook min of meer het doel is van quantumcomputers. Al werken de ‘biologische’ schakelingen wel op een heel ander soort manier. Menselijker.
(wetenschap24.nl)
Menselijke machines
Wat de computerwetenschap en robotici kunnen leren van de mens
In de serie ‘wetenschap van de 21e eeuw’ worden vakgebieden uitgelicht die laatste jaren bol staan van de nieuwe ontwikkelingen. Dit keer legt Frank van der Velde uit hoe computers en robots nog “slimmer” kunnen worden gemaakt door goed te kijken naar de psychologie en fysiologie van de mens.

© Facontidavide / Wikimedia
In de jaren '50 droomde men van superslimme, mensachtige computers en robots. Inmiddels zijn computers beter dan wij in spelletjes als schaken en jeopardy. Maar waar blijven de robots die echt alles kunnen wat een mens kan? (Op de foto: de robot REEM-A.)
Zullen computers of robots ooit écht op mensen gaan lijken? En dan niet per se qua uiterlijk, maar wat betreft hun vermogens? Dit was de ultieme droom ten tijde van de opkomst van computers en kunstmatige intelligentie, in de jaren ’50 van de vorige eeuw. Maar ruim een halve eeuw later is de ontwikkeling van dergelijke mensachtige machines ogenschijnlijk nog weinig opgeschoten.
Professor Frank van der Velde is niet eens met de stelling dat kunstmatige intelligentie (AI) nog weinig voorstelt. Of, zoals een kritische bezoeker onlangs op deze website opmerkte, dat het nog altijd een kwestie is van relatief simpele databases en programmeerregels. Van der Velde: ‘Als je het heel cru wilt stellen is dit inderdaad het enige wat een “intelligente” computer als Watson, die niet zo lang geleden in staat bleek om het spel Jeopardy te winnen, doet. Maar ook dit is niet zo triviaal als het lijkt. Je hebt hiervoor bijvoorbeeld wel geavanceerde zoekstrategieën nodig. Er begint bovendien wel degelijk inzicht te ontstaan in hoe neurale systemen werken, hoe waarneming werkt, hoe aandachtsprocessen werken. Het is wel nog heel moeilijk om dit in te bouwen in een computer, onder andere door beperkingen van de hardware.’
Van der Velde is zowel psycholoog als natuurkundige. Op het eerste gezicht heeft psychologie misschien weinig met robotica te maken. Maar Van der Velde houdt zich aan de Technische Universiteit Twente bezig met een vakgebied genaamd technische cognitie. Kort gezegd komt het erop neer dat hij kijkt hoe je de manier waarop intelligentie en hersenprocessen bij mensen werken, inclusief hun fysiologie (dus hoe onze hersenen biologisch in elkaar zitten), kunt toepassen in technische systemen. Waaronder robots.

Alan Turing, grondlegger van de computerwetenschap en kunstmatige intelligentie. Dit jaar (2012) is het Turingjaar, om de honderdste geboortedag van de in 1954 overleden wiskundige te herdenken.
Turing Machine
Ontwikkelingen in de psychologie en de computerwetenschap gaan eigenlijk al decennia lang min of meer hand in hand, zo legt Van der Velde uit. Rond de tijd dat computers opkwamen, maakte binnen de psychologie het zogenoemde behaviorisme plaats voor de cognitieve psychologie. Waarbij niet alleen van buitenaf werd gekeken naar menselijk gedrag, maar juist ook werd geprobeerd te kijken hoe menselijk gedrag van binnen, in de hersenen, tot stand komt. Het idee dat toen ontstond was dat menselijke hersenen eigenlijk net zo werken als een computer.
Van der Velde: ‘Bij computers geldt het idee dat een programma, waarmee je iets doet, en de data eigenlijk hetzelfde zijn. Het zijn allebei data. Alleen interpreteert de computer het ene stukje data als het programma, en het andere stukje als data die door het programma wordt verwerkt. Turing heeft dit destijds ook laten zien met zijn Universal Turing Machine. Dus toen was het idee: misschien werkt menselijke cognitie ook zo. Cognitie is het verwerken van data, en wij hebben programma’s in ons hoofd die dit doen. Dus eigenlijk hoef ik alleen de regels van het programma te kennen, om te weten hoe cognitie werkt.’
En als je die regels van de menselijke cognitie eenmaal kent, kun je die ook in een computer stoppen, zo was het idee. Maar gaandeweg kwam men erachter dat het toch niet helemaal zo werkte. Van der Velde: ‘Het bleek ontzettend moeilijk om op deze manier computerprogramma’s te maken, en dan vooral programma’s die zich flexibel kunnen aanpassen aan hun omgeving. Het blijft toch de programmeur die de regels moet inprogrammeren; maar je kunt gewoon niet alle mogelijkheden voor zijn.’ Met andere woorden: als je bijvoorbeeld een robot wilt programmeren, kun je nooit regeltjes inprogrammeren voor alle mogelijke situaties waar die robot tegenaan kan lopen als je hem loslaat in de wereld.
In de tussentijd groeide ook het inzicht in de menselijke psychologie en in hoe onze hersenen werken. Rond het begin van de jaren ‘90 kwam er daarom een nieuwe stroming op in de computerwetenschap, die meende dat je nog meer letterlijk naar de structuur van het brein moet kijken om menselijke intelligentie te kunnen benaderen. Van der Velde: ‘Het idee dat je met het schrijven van een computerprogramma menselijke intelligentie benadert, heeft in zoverre ingeboet, dat men inmiddels wel door heeft dat zulke computerprogramma’s ook lerende capaciteiten moeten hebben. En dat ze bijvoorbeeld om moeten kunnen gaan met kansberekening, en waarschijnlijkheidsregels.’

© Karl Palutke / Wikimedia
'Drop it! Dead or alive, you are coming with me.' Robocop was in de gelijknamige film half mens, half robot. Daarom kon hij ontsnappen van een echte robot door een trappenhuis in te vluchten. Voor klassieke robots was traplopen een onmogelijke opgave.
Robocop
Ook in andere opzichten groeide het idee dat je, om bijvoorbeeld echt mensachtige robots te kunnen bouwen, nog meer letterlijk moet kijken naar hoe dingen bij de mens werken. Zoals in het geval van robots die kunnen lopen. Van der Velde: ‘In het begin van de robotica lieten ze robots van tevoren uitrekenen hoe ze moesten stappen. Letterlijk. Dan moet die hoek zo, en dan zit de geometrie zo, en dan... Dat was een drama! Paul Verhoeven, die zelf wiskunde heeft gestudeerd, drijft in zijn films vaak de spot met zulke klassieke AI, is me opgevallen. Een mooi voorbeeld vind je in zijn film Robocop [uit 1987, red]. In die film speelt, naast die agent die een mengeling is van robotica en een mens, ook een echte robot. Op het eind van de film is er een gevecht tussen robocop en die joekel van een robot. Robocop ziet alle hoeken van de kamer, tot hij op een gegeven moment een trappenhuis in vlucht. Dat moment, dat is een heel typische scène, daarbij moet ik altijd denken aan die klassieke AI robots. Je ziet dan die grote robot staan, bovenaan die trap. En je ziet hem bijna denken: “O jee, wat moet ik? Help!” Je ziet hem rekenen. Nu moet ik mijn been een stap lager zetten. Hoe doe ik dat? Hij vertraagt ook helemaal, want hij rekent zich suf. En dan zet hij één stap, en dat lukt nog. En dan wil hij zijn andere been erbij zetten. Maar binnen de kortste keren lukt het niet meer. En dan dondert hij naar beneden.’
Bij mensen werkt lopen heel anders. Wij denken er sowieso niet bewust bij na hoe we onze benen moeten verplaatsen. En we krijgen tijdens het lopen continu feedback van onder meer onze tastzenuwen. Van der Velde: ‘De Australische computerwetenschapper Rodney Brooks is een van de eersten geweest die heeft laten zien dat er heel veel dynamica zit in spiercellen en in de mechanica van je been. Waardoor je been als het ware passief reageert op wat je voelt. En je op die manier stabiel houdt. Hij heeft ook laten zien dat je bij robots via vrij eenvoudige, mechanische aanpassingen loopgedrag kunt krijgen dat al veel beter werkt.’ De laatste jaren is dit inzicht steeds verder uitgewerkt. Waardoor er inmiddels robots kunnen worden gebouwd die wel kunnen traplopen. En zelfs robots die over moeilijk terrein, zoals rotsen of het puin van ingestorte gebouwen, kunnen lopen (filmpje).

© Ylem / Wikimedia
Het lijkt zo simpel: je kijkt ergens naar, en je hersenen zeggen je: 'hé, dat is een stoel' of 'dat is het gezicht van je geliefde'. Maar eigenlijk is iets 'zien' een enorm ingewikkeld proces, waarbij de informatie uit je oog stapje voor stapje wordt verwerkt.
Zien
Iets soortgelijks speelt bij de manier waarop wij mensen voorwerpen en omgeving kunnen zien, en technieken voor de verwerking van visuele informatie door computers en robots. Van der Velde: ‘Wat de laatste jaren duidelijk is geworden, is dat het herkennen van een voorwerp heel geleidelijk gaat. Vroeger ging dat fout. Toen dacht men: dat gaat in één keer. Dus je krijgt een beeld binnen, en zet daar een systeem op dat die beelden kan classificeren. Maar dat is ondoenlijk. Gewoon ondoenlijk. En dat is, zoals breinonderzoek laat zien, ook niet wat er bij mensen gebeurt. Wat je in het brein ziet is dat het beeld geleidelijk aan wordt opgebouwd, stapje voor stapje.’ Als er een beeld op het netvlies van je oog valt, zo is inmiddels dus duidelijk, “zien” de hersencellen die als eerste deze informatie binnenkrijgen alleen een soort contraststipjes. De hersencellen die een niveau hoger werken weten de stipjes om te zetten in lijnen, en zo steeds verder, tot na een stap of tien er misschien hersencellen zijn die merken: ‘hé, al die informatie bij elkaar, dat is een gezicht’.
En dan is er nog het gegeven van aandacht. Wij mensen zien nooit letterlijk onze hele omgeving; eigenlijk zien we alleen datgene waar we onze aandacht op richten echt goed. De rest wordt door onze hersenen op een vrij grove manier ingevuld. Daarom is het ook zo makkelijk om mensen voor te gek te houden met bijvoorbeeld filmpjes waarin plotseling een gorilla door het beeld loopt, of de presentator opeens hele andere kleren aan heeft, zonder dat degene die naar zo’n filmpje kijkt dit merkt. Bovendien wordt onze aandacht – en daarmee wat we zien – vaak aangetrokken door bijvoorbeeld beweging. Dit soort inzichten in de menselijke manier van zien worden de laatste jaren bijvoorbeeld toegepast in slimme systemen voor beveiligingscamera's.

© Lorenzo Natale / Wikimedia
De iCub is mensachtige robot ter grootte van een kleuter. Frank van de Velde hoopt er met zijn vakgroep een aan te kunnen schaffen, om hun ideeën in praktijk te kunnen testen.
iCub
Het onderzoek van Van der Velde zelf richt zich ook voornamelijk op waarneming en op aandachtsprocessen. Zijn vakgroep heeft op het moment een subsidieaanvraag lopen om een mensachtige robot genaamd een iCub te kunnen aanschaffen. Zodat zij en andere vakgroepen binnen de TU Twente allerlei ideeën in praktijk kunnen testen. Het belangrijkste doel van Van der Velde is om deze robot concepten aan te leren, zoals begrip van werkwoorden als ‘pak’, of van wat boven of onder is. En hoe zulke concepten zich tot elkaar verhouden. Maar dit alles dan wel zonder letterlijke regels in te programmeren voor die concepten. Het is dus eigenlijk de bedoeling dat de robot dit soort dingen gaat leren op dezelfde manier als menselijke baby’s of kinderen leren hoe de wereld werkt.
Voor de komende tien jaar verwacht Van der Velde ook veel van ontwikkelingen aan de hardwarekant in plaats van in de software. Bijvoorbeeld op het vlak van parallelle informatieverwerking. Onze menselijke hersenen zijn zo snel, omdat allerlei onderdelen van onze hersenen tegelijkertijd informatie kunnen verwerken, parallel dus. Maar bij een computer moet alle informatie verwerkt worden door de processor, die in feite maar één berekening tegelijk kan doen. Dus ongeacht hoe de informatie binnenkomt, uiteindelijk moet het allemaal netjes op een rij door de processor verwerkt worden. Dit kan dan wel relatief snel – om precies te zijn, met de kloksnelheid van de processor. Als je een processor hebt met een kloksnelheid van pakweg 2 GHz, kan deze 2 miljard berekeningen per seconde uitvoeren. Maar door dit één voor één verwerken van piepkleine stukjes informatie zijn computers in bepaalde opzichten toch langzamer dan menselijke hersenen. Computers met een dual core of quad core processor werken met twee of vier processoren, en kunnen twee tot vier van die informatiestromen tegelijk aan. Maar dit is nog steeds relatief weinig.

© PD-USGOV / Wikimedia
Menselijke neuronen (hersencellen) communiceren met elkaar via zogenoemde synapsen. De ene cel laat een chemische stof los in een kleine ruimte tussen de cellen, waarna de andere cel dit waarneemt. Door meer of minder van zo'n signaalstof af te geven, kunnen hersencellen een sterker of zwakker signaal doorgeven. Biologische hardware
Tijdens het interview haalt Van der Velde ook regelmatig een recent gepubliceerd onderzoek aan waarin de schakeling tussen menselijke neuronen is nagebouwd met behulp van nano-materialen. Menselijke neuronen, oftewel hersencellen, staan met elkaar in verbinding via zogenoemde synapsen. Die synapsen kunnen er via een chemisch proces voor zorgen dat een signaal dat van de ene op de andere hersenencel wordt doorgegeven sterker of zwakker is. Synapsen spelen ook een rol bij de aanleg van netwerkstructuren in je hersenen, waardoor je verbinding kunt leggen tussen allerlei verschillende concepten. Bijvoorbeeld wat een kat is, welke eigenschappen dit dier zoal heeft. En wat een hond is. En dat honden en katten vaak niet zo goed samengaan.
Het staat nog in de kinderschoenen, maar in theorie is iets dergelijks ook mogelijk met de door Van der Velde aangehaalde nano-materialen. Van der Velde: ‘Het gaat hier het om materialen die, als je er stroom dooreen laat lopen, als het ware onthouden dat die stroom er doorheen is gelopen. Waarna ze de volgende keer minder weerstand hebben. Je zou dit biologische hardware kunnen noemen. Zo noemen degenen die dit onderzoek hebben uitgevoerd het ook: “brain-like”. “Brain-inspired computing is an emerging field”, schrijven ze hier. Je kunt hiermee hardware maken die zich configureert als er activiteit plaatsvindt. Die kan leren. En die dat ook vasthoudt. Net als je geheugen, zegmaar.’
Als het op een gegeven moment mogelijk wordt om computers te maken met zulk soort hardeware, hoeven die dus ook niet meer zoals klassieke computers te werken met enen en nullen. De schakelingen kunnen ook met andere waardes werken, ergens tussen de nul (wat in de klassieke computertechnologie staat voor geen stroompje) en de één (volledige stroomsterkte) in. Wat ook min of meer het doel is van quantumcomputers. Al werken de ‘biologische’ schakelingen wel op een heel ander soort manier. Menselijker.
(wetenschap24.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
14-06-2012
Robot leert op dezelfde wijze als kinderen praten
Ouders leren hun kinderen praten door met ze in gesprek te gaan. Wetenschappers hebben nu geprobeerd om een robot op dezelfde manier te leren spreken. En met succes.
De onderzoekers van de Universiteit van Hertfordshire gebruikten tijdens hun experiment robot DeeChee. De robot lijkt qua bouw redelijk op een mens en heeft bijvoorbeeld ook armen, benen en een min of meer menselijk hoofd.
Experiment
Mensen kregen de opdracht om met DeeChee in gesprek te gaan en de robot zo dingen te leren. Tussen de robot en de mensen bevond zich een tafel met daarop kubussen. Op de kubussen stonden objecten in verschillende kleuren afgebeeld. Door de kubussen aan DeeChee te laten zien en te benoemen wat er op stond, probeerden de proefpersonen DeeChee woorden en objecten te leren. Onderstaand filmpje is daar een voorbeeld van.
Babbelen
In eerste instantie babbelde DeeChee terug. Alsof de robot een baby was. Wanneer de proefpersonen iets in het gebabbel herkenden, herhaalden ze dat nog eens, net zoals mensen dat bij kinderen doen. Als een baby naar een bal wijst en zegt ‘al‘, zal moeder zeggen ‘Goed zo, dat is de bal’. Zo pakten de proefpersonen dat ook aan, ze praatten zelfs tegen DeeChee alsof het een klein kind was. En die methode werkte, zo concluderen de onderzoekers in het blad PLoS ONE.
Hoe ‘leert’ de robot woorden?
Wanneer DeeChee de proefpersoon wat hoorde zeggen, dan hoorde deze dat als een verzameling klanken. Aan de robot de opdracht om al die klanken tot mogelijke woorden samen te voegen. Een voorbeeld: de gesprekspartner van de robot zei bijvoorbeeld ‘a red box‘. De robot hoorde de klanken en kon die op deze manieren samenvoegen: a, ar, re, red, e, ed, bo, box, o, ox. Die klanken gooide de robot er weer uit, de proefpersoon bevestigde wat klopte (in dit geval: red en box. DeeChee analyseerde de feedback, legde deze naast het eigen gebabbel en selecteerde uit het gebabbel het juiste woord.
En DeeChee deed dat heel aardig. Al na enkele minuten ging deze van gebabbel naar perfecte uitspraak van woorden. Het onderzoek is daarmee niet alleen interessant voor onderzoekers in de robotica, maar ook voor wetenschappers die bestuderen hoe jonge kinderen zich een taal eigen maken.
(scientias.nl)
Robot leert op dezelfde wijze als kinderen praten

Ouders leren hun kinderen praten door met ze in gesprek te gaan. Wetenschappers hebben nu geprobeerd om een robot op dezelfde manier te leren spreken. En met succes.
De onderzoekers van de Universiteit van Hertfordshire gebruikten tijdens hun experiment robot DeeChee. De robot lijkt qua bouw redelijk op een mens en heeft bijvoorbeeld ook armen, benen en een min of meer menselijk hoofd.
Experiment
Mensen kregen de opdracht om met DeeChee in gesprek te gaan en de robot zo dingen te leren. Tussen de robot en de mensen bevond zich een tafel met daarop kubussen. Op de kubussen stonden objecten in verschillende kleuren afgebeeld. Door de kubussen aan DeeChee te laten zien en te benoemen wat er op stond, probeerden de proefpersonen DeeChee woorden en objecten te leren. Onderstaand filmpje is daar een voorbeeld van.

Babbelen
In eerste instantie babbelde DeeChee terug. Alsof de robot een baby was. Wanneer de proefpersonen iets in het gebabbel herkenden, herhaalden ze dat nog eens, net zoals mensen dat bij kinderen doen. Als een baby naar een bal wijst en zegt ‘al‘, zal moeder zeggen ‘Goed zo, dat is de bal’. Zo pakten de proefpersonen dat ook aan, ze praatten zelfs tegen DeeChee alsof het een klein kind was. En die methode werkte, zo concluderen de onderzoekers in het blad PLoS ONE.
Hoe ‘leert’ de robot woorden?
Wanneer DeeChee de proefpersoon wat hoorde zeggen, dan hoorde deze dat als een verzameling klanken. Aan de robot de opdracht om al die klanken tot mogelijke woorden samen te voegen. Een voorbeeld: de gesprekspartner van de robot zei bijvoorbeeld ‘a red box‘. De robot hoorde de klanken en kon die op deze manieren samenvoegen: a, ar, re, red, e, ed, bo, box, o, ox. Die klanken gooide de robot er weer uit, de proefpersoon bevestigde wat klopte (in dit geval: red en box. DeeChee analyseerde de feedback, legde deze naast het eigen gebabbel en selecteerde uit het gebabbel het juiste woord.
En DeeChee deed dat heel aardig. Al na enkele minuten ging deze van gebabbel naar perfecte uitspraak van woorden. Het onderzoek is daarmee niet alleen interessant voor onderzoekers in de robotica, maar ook voor wetenschappers die bestuderen hoe jonge kinderen zich een taal eigen maken.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Erg leuk voor geintresseerden: http://www.kickstarter.co(...)ix-legged-open-robot
The Story
I love robots, but they can be a really expensive hobby, especially legged robots. When I tried to build a hexapod in college, everything I found was typically $1,000-$2,000. Current kits are expensive and tough to use, and meant for people that are already into robotics. The designs for them are closed, and rarely if ever updated. When I started development of Hexy roughly a year ago, I was using 10 year-old software and electronics, because that's what was available, and it showed. Why not make a hexapod kit that makes complex robotics cheaper, easier to learn, radically more fun (and cute!) and based on completely open hardware and software?
The Dream
Cheap robots for everyone! The idea behind ArcBotics is to become the Ikea of robotics. Provide functional, minimalistic robots with step-by-step instruction that anyone can make, lowering cost as much as possible in the process. Hexy is the first robot a line of many that aims to enable low-cost, easy access to easily modifiable and expandable robots, for everyone from the learning student to the high-end researcher.
The Robot
Hexy the Hexapod is a cute-as-buttons fun little six-legged robot buddy, and is the first ArcBotics Open Robotics kit. Hexy is:
Low cost, 1/10th the price of current hexapod kits
If we hit $200k, we'll add a drag-and-drop programming GUI based on miniBloq
Program moves as a text file. Easy commands like "rotate right 40 deg"
Easy to program more functionality. Arduino micro controller, Python move generator/controller
Easy to assemble - Full step-by-step video tutorials and picture/text tutorials, geared towards the high school level and above
Completely Arduino-compatible, the Servotor32 controller uses the same chip as the Arduino Leonardo
Comes with demo moves pre-available. Have it dance immediately once built!
Completely Open-Source. Code, Laser cutter DXF/STL/SLDWRKS files, electronics board files, everything. Go nuts.
It Comes With:
Literally Everything needed to build the kit, I even give the screwdriver.
Ultrasonic distance sensor eyes
Acrylic laser-cut pieces in your choice of six colors, with extra pieces
20 Servos (18 for legs, 1 for eyes, 1 extra)
Full arduino-based Servotor32 robot controller capable of controlling up to 32 Servos
All the screws and nuts you need to assemble the kit, with extras
Bluetooth kits come with a serial-bluetooth adapter that plugs straight into the Servotor32 robot controller
All the assembly instructions, source material, etc on a thumb drive
Use it to learn advanced robotics concepts like inverse kinematics, or use pre-built code to have it march to your bidding. Build it using the high-quality video and picture filled tutorials, and its ready to walk, play and dance with pre-built demos.
The Servitor32 robot controller is fully Arduino-based open hardware, capable of controlling up to 32 servos and/or any sensor you can plug into an Arduino, programmable using Arduino code. Hook it to your PC or Mac via USB or have it run autonomously. . Use the controller and servos in other robot projects. Do what you want, all the code, and plans and cut files are yours.
The Story
I love robots, but they can be a really expensive hobby, especially legged robots. When I tried to build a hexapod in college, everything I found was typically $1,000-$2,000. Current kits are expensive and tough to use, and meant for people that are already into robotics. The designs for them are closed, and rarely if ever updated. When I started development of Hexy roughly a year ago, I was using 10 year-old software and electronics, because that's what was available, and it showed. Why not make a hexapod kit that makes complex robotics cheaper, easier to learn, radically more fun (and cute!) and based on completely open hardware and software?
The Dream
Cheap robots for everyone! The idea behind ArcBotics is to become the Ikea of robotics. Provide functional, minimalistic robots with step-by-step instruction that anyone can make, lowering cost as much as possible in the process. Hexy is the first robot a line of many that aims to enable low-cost, easy access to easily modifiable and expandable robots, for everyone from the learning student to the high-end researcher.
The Robot
Hexy the Hexapod is a cute-as-buttons fun little six-legged robot buddy, and is the first ArcBotics Open Robotics kit. Hexy is:
Low cost, 1/10th the price of current hexapod kits
If we hit $200k, we'll add a drag-and-drop programming GUI based on miniBloq
Program moves as a text file. Easy commands like "rotate right 40 deg"
Easy to program more functionality. Arduino micro controller, Python move generator/controller
Easy to assemble - Full step-by-step video tutorials and picture/text tutorials, geared towards the high school level and above
Completely Arduino-compatible, the Servotor32 controller uses the same chip as the Arduino Leonardo
Comes with demo moves pre-available. Have it dance immediately once built!
Completely Open-Source. Code, Laser cutter DXF/STL/SLDWRKS files, electronics board files, everything. Go nuts.
It Comes With:
Literally Everything needed to build the kit, I even give the screwdriver.
Ultrasonic distance sensor eyes
Acrylic laser-cut pieces in your choice of six colors, with extra pieces
20 Servos (18 for legs, 1 for eyes, 1 extra)
Full arduino-based Servotor32 robot controller capable of controlling up to 32 Servos
All the screws and nuts you need to assemble the kit, with extras
Bluetooth kits come with a serial-bluetooth adapter that plugs straight into the Servotor32 robot controller
All the assembly instructions, source material, etc on a thumb drive
Use it to learn advanced robotics concepts like inverse kinematics, or use pre-built code to have it march to your bidding. Build it using the high-quality video and picture filled tutorials, and its ready to walk, play and dance with pre-built demos.
The Servitor32 robot controller is fully Arduino-based open hardware, capable of controlling up to 32 servos and/or any sensor you can plug into an Arduino, programmable using Arduino code. Hook it to your PC or Mac via USB or have it run autonomously. . Use the controller and servos in other robot projects. Do what you want, all the code, and plans and cut files are yours.



En mochten we vallen dan is het omhoog. - Krang (uit: Pantani)
My favourite music is the music I haven't yet heard - John Cage
Water: ijskoud de hardste - Gehenna
My favourite music is the music I haven't yet heard - John Cage
Water: ijskoud de hardste - Gehenna
18-06-2012
Nederlandse voetbalrobots gaan voor de wereldtitel
Met Oranje is het helaas niets geworden, maar er is nog een kans om onze eer hoog te houden. En wel op het WK voor voetbalrobots waar Nederland in het verleden al prima scoorde.
Woensdag begint het WK voor voetbalrobots. En ook Nederland is erbij en wel in de vorm van het robotvoetbalteam van de TU Eindhoven.
Wereldtitel
De robots en hun bouwers hebben een duidelijk doel voor ogen: de wereldtitel veroveren. Een fantastische ambitie. Maar is het ook haalbaar? Eerder behaalde resultaten bieden natuurlijk geen garantie voor de toekomst, maar de Nederlandse robots deden het de afgelopen jaren echt niet slecht. In 2008, 2009, 2010 en 2011 haalden de robots de finale. Helaas verloren ze die ook in allevier de gevallen. Maar…laten we hopen dat in dit geval vijf keer scheepsrecht is!
De robots tijdens het WK in 2008. Foto: Tech United.
Betere balcontrole
Het afgelopen jaar is er weer flink aan de robots gesleuteld. Zo spelen ze nog beter samen en hebben ze bij tackles ook een betere balcontrole. “De samenwerking tussen de robots hebben we stukken verbeterd. In plaats van lange dribbelacties zoeken we nu de vrije ruimte, door de bal over te spelen. Verder zijn we sterker in één tegen één situaties. We kunnen nu schokken detecteren, met een extra sensor, waardoor we voorkomen dat we de bal verliezen door harde tackles,” vertelt teamcaptain Robin Soetens.
Winnen!
Of het genoeg is om de wereldtitel mee naar huis te nemen? “Het is een sterk deelnemersveld, dus het wordt zeker niet gemakkelijk. Vooral Water uit China en MRL uit Iran zijn teams waar we voor moeten oppassen. En Portugal is een belangrijke outsider. We moeten dus iedere wedstrijd scherp zijn.”
Het robotvoetbalteam van de TU Delft draagt de naam Tech United en telt vijf spelers. De robots spelen naar eigen inzicht: ze worden dus niet door mensen bestuurd. De regels voor de robotvoetballers worden elk jaar aangescherpt en daardoor worden de studenten die de robots bouwen, gedwongen om te innoveren. Daarbij worden nieuwe technieken en technologieën bedacht die ook weer kunnen worden toegepast in andere robots. Bijvoorbeeld robots die mensen verzorgen. Uiteindelijk moeten voor de robotvoetballers dezelfde regels gaan gelden als voor ‘echte’ voetballers. Sterker nog: men hoopt dat de robotvoetballers in 2050 de menselijke WK-finalist van het veld vegen.
(scientias.nl)
Nederlandse voetbalrobots gaan voor de wereldtitel

Met Oranje is het helaas niets geworden, maar er is nog een kans om onze eer hoog te houden. En wel op het WK voor voetbalrobots waar Nederland in het verleden al prima scoorde.
Woensdag begint het WK voor voetbalrobots. En ook Nederland is erbij en wel in de vorm van het robotvoetbalteam van de TU Eindhoven.
Wereldtitel
De robots en hun bouwers hebben een duidelijk doel voor ogen: de wereldtitel veroveren. Een fantastische ambitie. Maar is het ook haalbaar? Eerder behaalde resultaten bieden natuurlijk geen garantie voor de toekomst, maar de Nederlandse robots deden het de afgelopen jaren echt niet slecht. In 2008, 2009, 2010 en 2011 haalden de robots de finale. Helaas verloren ze die ook in allevier de gevallen. Maar…laten we hopen dat in dit geval vijf keer scheepsrecht is!

De robots tijdens het WK in 2008. Foto: Tech United.
Betere balcontrole
Het afgelopen jaar is er weer flink aan de robots gesleuteld. Zo spelen ze nog beter samen en hebben ze bij tackles ook een betere balcontrole. “De samenwerking tussen de robots hebben we stukken verbeterd. In plaats van lange dribbelacties zoeken we nu de vrije ruimte, door de bal over te spelen. Verder zijn we sterker in één tegen één situaties. We kunnen nu schokken detecteren, met een extra sensor, waardoor we voorkomen dat we de bal verliezen door harde tackles,” vertelt teamcaptain Robin Soetens.
Winnen!
Of het genoeg is om de wereldtitel mee naar huis te nemen? “Het is een sterk deelnemersveld, dus het wordt zeker niet gemakkelijk. Vooral Water uit China en MRL uit Iran zijn teams waar we voor moeten oppassen. En Portugal is een belangrijke outsider. We moeten dus iedere wedstrijd scherp zijn.”
Het robotvoetbalteam van de TU Delft draagt de naam Tech United en telt vijf spelers. De robots spelen naar eigen inzicht: ze worden dus niet door mensen bestuurd. De regels voor de robotvoetballers worden elk jaar aangescherpt en daardoor worden de studenten die de robots bouwen, gedwongen om te innoveren. Daarbij worden nieuwe technieken en technologieën bedacht die ook weer kunnen worden toegepast in andere robots. Bijvoorbeeld robots die mensen verzorgen. Uiteindelijk moeten voor de robotvoetballers dezelfde regels gaan gelden als voor ‘echte’ voetballers. Sterker nog: men hoopt dat de robotvoetballers in 2050 de menselijke WK-finalist van het veld vegen.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
In de laatste alinea:
Dat moet TU Eindhoven zijn. TU Delft is er overigens wel bij, zij doen mee in de @home league.quote:Het robotvoetbalteam van de TU Delft draagt de naam Tech United en telt vijf spelers.
26-06-2012
Puberende robot weet Turingtest bijna te doorstaan
Mensen die met de puberende chatbot in gesprek gingen, dachten in 29 procent van de gevallen dat ze met een echt mens in gesprek waren. En daarmee is de bot bijna in staat om de Turingtest te verslaan.
De Turingtest – vernoemd naar de wereldberoemde Alan Turing – werkt heel eenvoudig. Mensen gaan chatten met anderen. Wat ze echter niet weten, is of die anderen echte mensen of robots zijn. Na het gesprek moeten ze daar een oordeel over vellen. Wanneer een robot dertig procent van de mensen weet te beduvelen en dus laat denken dat hij een mens is, heeft hij de Turingtest doorstaan.
Eugene
Tot op heden is dat nog geen enkele robot gelukt. Maar de robot Eugene Goostman kwam vorige week tijdens een Turingtest aan de universiteit van Reading wel heel dicht bij dat percentage in de buurt. 29 procent van de mensen die met Eugene spraken, dacht dat hij een echt mens was, zo meldt New Scientist.
Persoonlijkheid
Eugene Goostman heeft in het verleden ook al heel wat prijzen in de wacht gesleept. En dat is niet zo heel gek: Eugene is namelijk heel anders dan andere chatbots. Neem bijvoorbeeld zijn concurrent: Cleverbot. Deze geeft ook antwoorden op uw vragen, maar wie Cleverbot nu precies is? De bot kan iedereen zijn. Goostman is duidelijk een puber: een dertienjarige jongen uit Oekraïne. En dat is merkbaar in de antwoorden die hij geeft. Hij heeft een persoonlijkheid en zelfs een heus levensverhaal. Of dat de reden is dat hij zo menselijk overkomt? Het zal er zeker aan bijdragen.
Relevant
Het belangrijkste is echter dat Eugene in staat is om uw vragen goed te beantwoorden: hij begrijpt (in veel gevallen) wat u zegt en komt met een relevante reactie. En blijkbaar is hij op sommige momenten zo gevat dat sommige mensen echt dachten dat ze met een mens in gesprek waren. Nieuwsgierig of Eugene echt zo menselijk is? Ga hier zelf met de chatbot in gesprek!
Chatten met robots: het is niet zo’n ver-van-mijn-bedshow als het misschien lijkt: diverse grote bedrijven gebruiken op hun sites nu al robots om vragen van klanten te beantwoorden. Vaak gaat dat nu nog wat houterig, maar in de toekomst moeten robots mensen steeds beter van dienst kunnen zijn. Wellicht kunnen secretaresses straks wel door deze chattende robots vervangen worden. Maar ook in andere takken van sport, kunnen robots met een beetje feeling voor mensen aan de slag. Denk bijvoorbeeld aan de zorg of het onderwijs.
(scientias.nl)
Puberende robot weet Turingtest bijna te doorstaan

Mensen die met de puberende chatbot in gesprek gingen, dachten in 29 procent van de gevallen dat ze met een echt mens in gesprek waren. En daarmee is de bot bijna in staat om de Turingtest te verslaan.
De Turingtest – vernoemd naar de wereldberoemde Alan Turing – werkt heel eenvoudig. Mensen gaan chatten met anderen. Wat ze echter niet weten, is of die anderen echte mensen of robots zijn. Na het gesprek moeten ze daar een oordeel over vellen. Wanneer een robot dertig procent van de mensen weet te beduvelen en dus laat denken dat hij een mens is, heeft hij de Turingtest doorstaan.
Eugene
Tot op heden is dat nog geen enkele robot gelukt. Maar de robot Eugene Goostman kwam vorige week tijdens een Turingtest aan de universiteit van Reading wel heel dicht bij dat percentage in de buurt. 29 procent van de mensen die met Eugene spraken, dacht dat hij een echt mens was, zo meldt New Scientist.
Persoonlijkheid
Eugene Goostman heeft in het verleden ook al heel wat prijzen in de wacht gesleept. En dat is niet zo heel gek: Eugene is namelijk heel anders dan andere chatbots. Neem bijvoorbeeld zijn concurrent: Cleverbot. Deze geeft ook antwoorden op uw vragen, maar wie Cleverbot nu precies is? De bot kan iedereen zijn. Goostman is duidelijk een puber: een dertienjarige jongen uit Oekraïne. En dat is merkbaar in de antwoorden die hij geeft. Hij heeft een persoonlijkheid en zelfs een heus levensverhaal. Of dat de reden is dat hij zo menselijk overkomt? Het zal er zeker aan bijdragen.
Relevant
Het belangrijkste is echter dat Eugene in staat is om uw vragen goed te beantwoorden: hij begrijpt (in veel gevallen) wat u zegt en komt met een relevante reactie. En blijkbaar is hij op sommige momenten zo gevat dat sommige mensen echt dachten dat ze met een mens in gesprek waren. Nieuwsgierig of Eugene echt zo menselijk is? Ga hier zelf met de chatbot in gesprek!
Chatten met robots: het is niet zo’n ver-van-mijn-bedshow als het misschien lijkt: diverse grote bedrijven gebruiken op hun sites nu al robots om vragen van klanten te beantwoorden. Vaak gaat dat nu nog wat houterig, maar in de toekomst moeten robots mensen steeds beter van dienst kunnen zijn. Wellicht kunnen secretaresses straks wel door deze chattende robots vervangen worden. Maar ook in andere takken van sport, kunnen robots met een beetje feeling voor mensen aan de slag. Denk bijvoorbeeld aan de zorg of het onderwijs.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

28-06-2012
Deze robot wint áltijd bij 'Schaar, steen, papier'
© YouTube.
Onderzoekers aan de Universiteit van Tokio hebben een robot ontworpen die het spelletje 'Schaar, steen, papier' nooit verliest. De robot kan in een milliseconde zien welke vorm een hand gaat aannemen, en vormt vervolgens binnen een fractie van een seconde zelf het winnende gebaar. Dat staat vandaag in de Britse krant The Telegraph.
De robot maakt geen gebruik van ingewikkelde algoritmes, maar speelt in feite vals door zijn vermogen te gebruiken om bewegingen supersnel te kunnen analyseren. De analyse wordt zo snel verwerkt en vertaald naar het tegenovergestelde gebaar, dat de beweging niet met het blote oog waarneembaar is. Het gevolg: de robot wint honderd procent van alle potjes
(HLN)
Deze robot wint áltijd bij 'Schaar, steen, papier'

© YouTube.
Onderzoekers aan de Universiteit van Tokio hebben een robot ontworpen die het spelletje 'Schaar, steen, papier' nooit verliest. De robot kan in een milliseconde zien welke vorm een hand gaat aannemen, en vormt vervolgens binnen een fractie van een seconde zelf het winnende gebaar. Dat staat vandaag in de Britse krant The Telegraph.
De robot maakt geen gebruik van ingewikkelde algoritmes, maar speelt in feite vals door zijn vermogen te gebruiken om bewegingen supersnel te kunnen analyseren. De analyse wordt zo snel verwerkt en vertaald naar het tegenovergestelde gebaar, dat de beweging niet met het blote oog waarneembaar is. Het gevolg: de robot wint honderd procent van alle potjes

(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
27-06-2012
Nieuwe dansende robot is de perfecte DJ
Concurrentie voor Tiësto en Armin van Buuren. Een nieuwe robot kan muziek herkennen en op basis van de feedback van luisteraars bepalen wat er daarna gespeeld moet worden. En de robot kan nog dansen ook.
“We proberen een robotisch muzikaal gezelschap te ontwikkelen,” vertelt onderzoeker Gil Weinberg. “De robot danst niet alleen op de muziek die jij leuk vindt, maar weet ook iets van de muziek die je luistert, analyseert liedjes en weet hoe hij op verschillende liedjes moet dansen.” De robot geeft zelfs zijn mening over liedjes die u luistert. “Eigenlijk zorgt deze ervoor dat je nog meer kunt genieten van het luisteren naar muziek.”
Shimi
De robot heeft de naam Shimi gekregen en is eigenlijk gewoon een docking-station met hersenen. U legt uw telefoon in de handen van Shimi en de robot regelt de rest. Hij gebruikt de camera van de telefoon om een luisteraar door de kamer heen te volgen en stelt de speakers (zijn ‘oren) zo af dat de luisteraar de liedjes overal optimaal kan horen. En de robot kan liedjes ook herkennen. Wanneer een luisteraar het tempo van een liedje naklapt of tikt dan zoekt Shimi in de telefoon naar het liedje dat bij dat tempo hoort en speelt het direct af. Natuurlijk danst Shimi daarna ook op het ritme mee.
Creatief
In de nabije toekomst moet Shimi ook direct gaan reageren op de feedback van luisteraars. Wanneer zij hun hoofd schudden, kan hij het liedje overslaan en als ze zwaaien, kan hij het geluid harder of zachter zetten. En het is de bedoeling dat Shimi op basis van de muzieksmaak van zijn menselijk vrienden met suggesties komt voor andere liedjes. “Veel mensen denken dat robots beperkt zijn tot de instructies die ze ingeprogrammeerd hebben gekregen,” vertelt onderzoeker Mason Bretan. “Shimi laat ons zien dat robots ook creatief en interactief kunnen zijn.”
Naar verwachting is Shimi tegen 2013 klaar om de markt te gaan veroveren. De onderzoekers hopen dat er in de toekomst meer apps ontwikkeld kunnen worden die Shimi nog creatiever maken. “Als robots straks in huizen komen te staan, dan denken wij dat het zulke machines zullen zijn: klein, vermakelijk en plezierig.”
(scientias.nl)
Nieuwe dansende robot is de perfecte DJ

Concurrentie voor Tiësto en Armin van Buuren. Een nieuwe robot kan muziek herkennen en op basis van de feedback van luisteraars bepalen wat er daarna gespeeld moet worden. En de robot kan nog dansen ook.
“We proberen een robotisch muzikaal gezelschap te ontwikkelen,” vertelt onderzoeker Gil Weinberg. “De robot danst niet alleen op de muziek die jij leuk vindt, maar weet ook iets van de muziek die je luistert, analyseert liedjes en weet hoe hij op verschillende liedjes moet dansen.” De robot geeft zelfs zijn mening over liedjes die u luistert. “Eigenlijk zorgt deze ervoor dat je nog meer kunt genieten van het luisteren naar muziek.”
Shimi
De robot heeft de naam Shimi gekregen en is eigenlijk gewoon een docking-station met hersenen. U legt uw telefoon in de handen van Shimi en de robot regelt de rest. Hij gebruikt de camera van de telefoon om een luisteraar door de kamer heen te volgen en stelt de speakers (zijn ‘oren) zo af dat de luisteraar de liedjes overal optimaal kan horen. En de robot kan liedjes ook herkennen. Wanneer een luisteraar het tempo van een liedje naklapt of tikt dan zoekt Shimi in de telefoon naar het liedje dat bij dat tempo hoort en speelt het direct af. Natuurlijk danst Shimi daarna ook op het ritme mee.

Creatief
In de nabije toekomst moet Shimi ook direct gaan reageren op de feedback van luisteraars. Wanneer zij hun hoofd schudden, kan hij het liedje overslaan en als ze zwaaien, kan hij het geluid harder of zachter zetten. En het is de bedoeling dat Shimi op basis van de muzieksmaak van zijn menselijk vrienden met suggesties komt voor andere liedjes. “Veel mensen denken dat robots beperkt zijn tot de instructies die ze ingeprogrammeerd hebben gekregen,” vertelt onderzoeker Mason Bretan. “Shimi laat ons zien dat robots ook creatief en interactief kunnen zijn.”
Naar verwachting is Shimi tegen 2013 klaar om de markt te gaan veroveren. De onderzoekers hopen dat er in de toekomst meer apps ontwikkeld kunnen worden die Shimi nog creatiever maken. “Als robots straks in huizen komen te staan, dan denken wij dat het zulke machines zullen zijn: klein, vermakelijk en plezierig.”

(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
01-07-2012
Sociaal intelligente robots: droom of werkelijkheid?
Er is geen twijfel over mogelijk: robots worden steeds slimmer en gaan in de toekomst steeds meer taken van de mens overnemen. Dat er al robots bestaan die u een glaasje water kunnen brengen is niets nieuws maar een robot waar u een gesprek mee kunt voeren wel.
Tijdens de boekpresentatie van Overal robots. Automatisering van de liefde tot de dood waren sommigen toch nog sceptisch. Zo dacht iemand dat robots nooit sociaal intelligent konden worden. “Een robot stamt niet af van apen, mensen wel”. Ook waren mensen bang dat robots in onze samenleving zouden leiden tot desocialisering. Dr. Matthijs Pontier, werkzaam aan de Vrije Universiteit Amsterdam denkt dat dit wel mee zal vallen. “Ik denk niet dat robots leiden tot desocialisering. Als robots zich sociaal-emotioneel menselijk gedragen, waarom zouden we dan onze menselijke vaardigheden verliezen? Sterker nog, robots worden succesvol toegepast om mensen met autisme meer sociaal vaardig te maken,” vertelt hij in een interview aan Scientias.nl. Pontier ontwikkelde een model dat robots sociale intelligentie geeft en is nu bezig met een model dat hen moreel kan laten redeneren. “Een sociaal intelligente robot kan wel degelijk werkelijkheid worden”.
Wat dacht u toen u deze robot voor het eerst zag? Dacht u niet eerst aan een mens? Dat is helemaal niet zo vreemd; er zijn meerdere mensen die dit dachten. Philip lijkt zeer echt, maar schijn bedriegt: zodra hij begint te praten valt u op dat er iets niet klopt en dat kan u letterlijk rillingen bezorgen. “De zogeheten Uncanney Valley theorie” vertelt Pontier. “Als mensen iets zien dat op een mens lijkt maar toch ook weer niet, dan vinden zij dit beangstigend. Iets wat duidelijk niet tot onze soort behoort, vinden zij niet eng. Er is nog sprake van een duidelijke ‘mismatch’ tussen mensen en humanoïde robots. Deze laatste hebben al een menselijk uiterlijk, maar gedragen zich er niet naar en dat bezorgt velen de koude rillingen.” Pontier werkt sinds kort samen met Hanson Robotics. Samen willen zij binnen een paar jaar de modellen van Pontier op Philip K. Dick aansluiten.
Sociale intelligentie
Het ene model, dat Pontier schreef tijdens het behalen van zijn doctoraat, herkent gezichtsuitdrukkingen en emoties. Om dit te testen liet hij een aantal proefpersonen een speeddate uitvoeren met het model, dat was ingebouwd in een poppetje op de computer. Zowel de persoon als het poppetje kon kiezen tussen een aantal antwoorden bij het beantwoorden van een vraag die de ander stelde. Het poppetje leek de persoon die voor hem zat aardig te begrijpen. “Hij herkent een bepaalde emotionele lading. Wanneer de persoon onaardig deed, koos hij voor een ander antwoord dan wanneer hij of zij wel aardig deed.” Proefpersonen konden in het experiment niet onderscheiden of het poppetje bestuurd werd door het model of een echt persoon. Het model slaagde dus voor de Turing Test.
Het gezicht van robot Philip K. Dick. Foto gemaakt door Philip K. Dick Android Project.
Morele redenatie
Een ander model waar Pontier op dit moment nog mee bezig is, moet robots in de toekomst de mogelijkheid geven om moreel te redeneren. Dit is belangrijk voor bijvoorbeeld robots in de zorg of in het leger. “Om robots de levenskwaliteit van mensen te laten verbeteren, is het belangrijk dat zij moreel besef krijgen en afwegingen kunnen maken,” vertelt hij. Het is Pontier al gelukt om bepaalde vormen in het model te krijgen. “Een voorbeeld is wanneer een patiënt zijn medicijnen niet wil innemen. De robot moet dan vervolgens beslissen of hij de arts erbij haalt of niet.” Het model kan ook nuttig zijn voor robots in het leger. “Ik ben van mening dat robots pas op mensen mogen schieten wanneer zij moreel besef hebben en niet eerder.”
Menselijke eigenschappen
In het eerdere artikel vroeg Scientias.nl zich af of de illusie van sociale intelligentie niet al genoeg is. Huisdieren geven ons die illusie al, waarom zouden we dan een robot in huis willen? Zullen wij hetzelfde van een robot accepteren als van een huisdier? Pontier denkt van wel. “Uit wetenschappelijk onderzoek blijkt dat mensen al snel menselijke eigenschappen projecteren in dode voorwerpen, zoals een computer, een auto of een tamagotchi, net zoals ze dat inderdaad in (levende) dieren doen. Hierdoor zal een illusie van sociale intelligentie al snel door mensen ervaren worden als dat de robot hen ‘echt’ begrijpt.”
Vertrouwen
Toch kan een samenleving met robots mogelijk best beangstigend zijn. U zal dan vertrouwen moeten hebben in een machine en niet in een mens, die weet wat hij doet. Pontier denkt dat mensen snel over dit probleem heen kunnen stappen. “Denk maar aan een wasmachine. In het begin controleert u of hij wel echt schoonmaakt. Maar op een gegeven moment stopt dat en heeft u er vertrouwen in.” Een ander recent voorbeeld is de Google auto. Deze volledig autonome auto gaat binnenkort de weg op in de Verenigde Staten. “Mensen kunnen bang zijn voor een wereld die gedomineerd wordt door machines. Ik denk niet dat dit gaat gebeuren, maar we moeten er wel goed over nadenken.”
Voor nu zijn er al wel robots op de markt die uw huis stofzuigen of het gras maaien. Volgens Pontier worden ze steeds populairder. “Er is al veel enthousiasme, ondanks dat de techniek nog veel verbeteringen nodig heeft. Binnen een paar jaar komen er ook robotkatjes op de markt voor kinderen en zullen de schoonmaakrobots flink zijn verbeterd. Ook wordt er gewerkt aan softwarerobots, die uw financiële administratie doen en een koelkast die zelf de voorraad bij houdt en boodschappenlijstjes maakt. Het is maar net waar je aan denkt bij een robot.” Toch zullen we nog even moeten wachten op volledig menselijke robots mét niet te onderscheiden sociale intelligentie. “Dat duurt nog wel een paar decennia, maar ik ben ervan overtuigd dat het kan en dat ga ik bewijzen!”
(scientias.nl)
Sociaal intelligente robots: droom of werkelijkheid?

Er is geen twijfel over mogelijk: robots worden steeds slimmer en gaan in de toekomst steeds meer taken van de mens overnemen. Dat er al robots bestaan die u een glaasje water kunnen brengen is niets nieuws maar een robot waar u een gesprek mee kunt voeren wel.
Tijdens de boekpresentatie van Overal robots. Automatisering van de liefde tot de dood waren sommigen toch nog sceptisch. Zo dacht iemand dat robots nooit sociaal intelligent konden worden. “Een robot stamt niet af van apen, mensen wel”. Ook waren mensen bang dat robots in onze samenleving zouden leiden tot desocialisering. Dr. Matthijs Pontier, werkzaam aan de Vrije Universiteit Amsterdam denkt dat dit wel mee zal vallen. “Ik denk niet dat robots leiden tot desocialisering. Als robots zich sociaal-emotioneel menselijk gedragen, waarom zouden we dan onze menselijke vaardigheden verliezen? Sterker nog, robots worden succesvol toegepast om mensen met autisme meer sociaal vaardig te maken,” vertelt hij in een interview aan Scientias.nl. Pontier ontwikkelde een model dat robots sociale intelligentie geeft en is nu bezig met een model dat hen moreel kan laten redeneren. “Een sociaal intelligente robot kan wel degelijk werkelijkheid worden”.

Wat dacht u toen u deze robot voor het eerst zag? Dacht u niet eerst aan een mens? Dat is helemaal niet zo vreemd; er zijn meerdere mensen die dit dachten. Philip lijkt zeer echt, maar schijn bedriegt: zodra hij begint te praten valt u op dat er iets niet klopt en dat kan u letterlijk rillingen bezorgen. “De zogeheten Uncanney Valley theorie” vertelt Pontier. “Als mensen iets zien dat op een mens lijkt maar toch ook weer niet, dan vinden zij dit beangstigend. Iets wat duidelijk niet tot onze soort behoort, vinden zij niet eng. Er is nog sprake van een duidelijke ‘mismatch’ tussen mensen en humanoïde robots. Deze laatste hebben al een menselijk uiterlijk, maar gedragen zich er niet naar en dat bezorgt velen de koude rillingen.” Pontier werkt sinds kort samen met Hanson Robotics. Samen willen zij binnen een paar jaar de modellen van Pontier op Philip K. Dick aansluiten.
Sociale intelligentie
Het ene model, dat Pontier schreef tijdens het behalen van zijn doctoraat, herkent gezichtsuitdrukkingen en emoties. Om dit te testen liet hij een aantal proefpersonen een speeddate uitvoeren met het model, dat was ingebouwd in een poppetje op de computer. Zowel de persoon als het poppetje kon kiezen tussen een aantal antwoorden bij het beantwoorden van een vraag die de ander stelde. Het poppetje leek de persoon die voor hem zat aardig te begrijpen. “Hij herkent een bepaalde emotionele lading. Wanneer de persoon onaardig deed, koos hij voor een ander antwoord dan wanneer hij of zij wel aardig deed.” Proefpersonen konden in het experiment niet onderscheiden of het poppetje bestuurd werd door het model of een echt persoon. Het model slaagde dus voor de Turing Test.

Het gezicht van robot Philip K. Dick. Foto gemaakt door Philip K. Dick Android Project.
Morele redenatie
Een ander model waar Pontier op dit moment nog mee bezig is, moet robots in de toekomst de mogelijkheid geven om moreel te redeneren. Dit is belangrijk voor bijvoorbeeld robots in de zorg of in het leger. “Om robots de levenskwaliteit van mensen te laten verbeteren, is het belangrijk dat zij moreel besef krijgen en afwegingen kunnen maken,” vertelt hij. Het is Pontier al gelukt om bepaalde vormen in het model te krijgen. “Een voorbeeld is wanneer een patiënt zijn medicijnen niet wil innemen. De robot moet dan vervolgens beslissen of hij de arts erbij haalt of niet.” Het model kan ook nuttig zijn voor robots in het leger. “Ik ben van mening dat robots pas op mensen mogen schieten wanneer zij moreel besef hebben en niet eerder.”
Menselijke eigenschappen
In het eerdere artikel vroeg Scientias.nl zich af of de illusie van sociale intelligentie niet al genoeg is. Huisdieren geven ons die illusie al, waarom zouden we dan een robot in huis willen? Zullen wij hetzelfde van een robot accepteren als van een huisdier? Pontier denkt van wel. “Uit wetenschappelijk onderzoek blijkt dat mensen al snel menselijke eigenschappen projecteren in dode voorwerpen, zoals een computer, een auto of een tamagotchi, net zoals ze dat inderdaad in (levende) dieren doen. Hierdoor zal een illusie van sociale intelligentie al snel door mensen ervaren worden als dat de robot hen ‘echt’ begrijpt.”
Vertrouwen
Toch kan een samenleving met robots mogelijk best beangstigend zijn. U zal dan vertrouwen moeten hebben in een machine en niet in een mens, die weet wat hij doet. Pontier denkt dat mensen snel over dit probleem heen kunnen stappen. “Denk maar aan een wasmachine. In het begin controleert u of hij wel echt schoonmaakt. Maar op een gegeven moment stopt dat en heeft u er vertrouwen in.” Een ander recent voorbeeld is de Google auto. Deze volledig autonome auto gaat binnenkort de weg op in de Verenigde Staten. “Mensen kunnen bang zijn voor een wereld die gedomineerd wordt door machines. Ik denk niet dat dit gaat gebeuren, maar we moeten er wel goed over nadenken.”
Voor nu zijn er al wel robots op de markt die uw huis stofzuigen of het gras maaien. Volgens Pontier worden ze steeds populairder. “Er is al veel enthousiasme, ondanks dat de techniek nog veel verbeteringen nodig heeft. Binnen een paar jaar komen er ook robotkatjes op de markt voor kinderen en zullen de schoonmaakrobots flink zijn verbeterd. Ook wordt er gewerkt aan softwarerobots, die uw financiële administratie doen en een koelkast die zelf de voorraad bij houdt en boodschappenlijstjes maakt. Het is maar net waar je aan denkt bij een robot.” Toch zullen we nog even moeten wachten op volledig menselijke robots mét niet te onderscheiden sociale intelligentie. “Dat duurt nog wel een paar decennia, maar ik ben ervan overtuigd dat het kan en dat ga ik bewijzen!”
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Ik ben van mening dat robots nooit dergelijke beslissingen mogen maken.quote:“Ik ben van mening dat robots pas op mensen mogen schieten wanneer zij moreel besef hebben en niet eerder.”
07-07-2012
Robotbenen imiteren menselijke pas accuraat
Amerikaanse onderzoekers hebben een set robotbenen gebouwd dat op een biologisch kloppende manier bewegen door de neurale architectuur van de mens in de robot te bouwen.
Foto: NU.nl
Niet alleen bouwden de onderzoekers de neurale architectuur versimpeld na, ook het sensorische systeem voor terugkoppeling en de spier-architectuur stopten ze in de robot.
Het onderzoeksteam van de University of Arizona publiceerde de bevindingen in het Journal of Neural Engineering.
.De biologische precisie waarmee de robot loopt, geeft onderzoekers de mogelijkheid onderliggende processen van lopen beter te leren kennen en daarmee theorieën over hoe baby’s leren lopen te versterken of hoe patiënten met rugletsel weer kunnen leren lopen.
Petroongenerator
Het belangrijkste onderdeel bij het menselijk loopsysteem is de centrale patroongenerator (CPG). De CPG is een neuraal netwerk in de lendenstreek (lumbale regio) van het ruggenmerg dat ritmische spiersignalen genereert.
De CPG maakt en controleert deze signalen door informatie van verschillende delen van het lichaam te verzamelen en zo op de omgeving te reageren. Dit zorgt ervoor dat mensen kunnen lopen zonder te hoeven denken.
De simpelste vorm van een CPG is een half-centrum, dat bestaat uit twee neuronen die om en om signalen afgeven en zo een ritme maken. De robot heeft een kunstmatig half-centrum en sensoren die informatie teruggeven aan het half-centrum, waaronder belastingssensoren die de kracht voelen waarmee een been op de vloer duwt.
Looprekje
Theresa Klein, een van de auteurs, legt uit dat het interessant is dat ze een stel wandelende benen hebben gebouwd met alleen maar een simpel half-centrum voor controle van de heupen en het onderste deel van de benen.
De robot loopt wel in een soort van looprekje, dat komt omdat hij zelf nog geen balans kan aansturen.
Complexer
De onderzoekers vermoeden dat baby’s beginnen met een simpel half-centrum, waarna ze langzaamaan een complexere manier van lopen ontwikkelen. Dat zou kunnen verklaren waarom baby’s wel een simpel looppatroon laten zien als ze rechtop gehouden worden door een rekje of door iemand die ze vasthoudt.
Het willen laten lopen van robots is al heel lang een uitdaging waar veel onderzoeksinstituten mee bezig zijn, in Nederland bijvoorbeeld aan de Universiteit Delft waar lopen vanuit gecontroleerd vallen wordt bezien.
De looprobot Flame was enkele jaren geleden een grote stap vooruit op het vlak van de looprobots.
Door: NU.nl/Krijn Soeteman .
Bekijk video
(nu.nl)
Robotbenen imiteren menselijke pas accuraat
Amerikaanse onderzoekers hebben een set robotbenen gebouwd dat op een biologisch kloppende manier bewegen door de neurale architectuur van de mens in de robot te bouwen.

Foto: NU.nl
Niet alleen bouwden de onderzoekers de neurale architectuur versimpeld na, ook het sensorische systeem voor terugkoppeling en de spier-architectuur stopten ze in de robot.
Het onderzoeksteam van de University of Arizona publiceerde de bevindingen in het Journal of Neural Engineering.
.De biologische precisie waarmee de robot loopt, geeft onderzoekers de mogelijkheid onderliggende processen van lopen beter te leren kennen en daarmee theorieën over hoe baby’s leren lopen te versterken of hoe patiënten met rugletsel weer kunnen leren lopen.
Petroongenerator
Het belangrijkste onderdeel bij het menselijk loopsysteem is de centrale patroongenerator (CPG). De CPG is een neuraal netwerk in de lendenstreek (lumbale regio) van het ruggenmerg dat ritmische spiersignalen genereert.
De CPG maakt en controleert deze signalen door informatie van verschillende delen van het lichaam te verzamelen en zo op de omgeving te reageren. Dit zorgt ervoor dat mensen kunnen lopen zonder te hoeven denken.
De simpelste vorm van een CPG is een half-centrum, dat bestaat uit twee neuronen die om en om signalen afgeven en zo een ritme maken. De robot heeft een kunstmatig half-centrum en sensoren die informatie teruggeven aan het half-centrum, waaronder belastingssensoren die de kracht voelen waarmee een been op de vloer duwt.
Looprekje
Theresa Klein, een van de auteurs, legt uit dat het interessant is dat ze een stel wandelende benen hebben gebouwd met alleen maar een simpel half-centrum voor controle van de heupen en het onderste deel van de benen.
De robot loopt wel in een soort van looprekje, dat komt omdat hij zelf nog geen balans kan aansturen.
Complexer
De onderzoekers vermoeden dat baby’s beginnen met een simpel half-centrum, waarna ze langzaamaan een complexere manier van lopen ontwikkelen. Dat zou kunnen verklaren waarom baby’s wel een simpel looppatroon laten zien als ze rechtop gehouden worden door een rekje of door iemand die ze vasthoudt.
Het willen laten lopen van robots is al heel lang een uitdaging waar veel onderzoeksinstituten mee bezig zijn, in Nederland bijvoorbeeld aan de Universiteit Delft waar lopen vanuit gecontroleerd vallen wordt bezien.
De looprobot Flame was enkele jaren geleden een grote stap vooruit op het vlak van de looprobots.
Door: NU.nl/Krijn Soeteman .
Bekijk video
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Lijkt me ook raar, want je wil robots juist laten schieten omdat ze GEEN moreel besef hebben. Straks krijg je opeens bange robots. Dan ben je weer terug bij af...quote:
[..]
Ik ben van mening dat robots nooit dergelijke beslissingen mogen maken.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Roboticstrendsquote:Artificial Cerebellum Enables Human-like Object Handling for Robots
University of Granada researchers have developed an artificial cerebellum that has restored lost brain function in rats.
An artificial cerebellum has restored lost brain function in rats, bringing the prospect of cyborg-style brain implants a step closer to reality
University of Granada researchers have developed an artificial cerebellum (a biologically-inspired adaptive microcircuit) that controls a robotic arm with human-like precision. The cerebellum is the part of the human brain that controls the locomotor system and coordinates body movements.
To date, although robot designers have achieved very precise movements, such movements are performed at very high speed, require strong forces and are power consuming. This approach cannot be applied to robots that interact with humans, as a malfunction might be potentially dangerous.
To solve this challenge, University of Granada researchers have implemented a new cerebellar spiking model that adapts to corrections and stores their sensorial effects; in addition, it records motor commands to predict the action or movement to be performed by the robotic arm. This cerebellar model allows the user to articulate a state-of-the-art robotic arm with extraordinary mobility.
Automatic Learning
The developers of the new cerebellar model have obtained a robot that performs automatic learning by extracting the input layer functionalities of the brain cortex. Furthermore, they have developed two control systems that enable accurate and robust control of the robotic arm during object handling.
The synergy between the cerebellum and the automatic control system enables robot's adaptability to changing conditions i.e. the robot can interact with humans. The biologically-inspired architectures used in this model combine the error training approach with predictive adaptive control.
The designers of this model are Silvia Tolu, Jesús Garrido and Eduardo Ros Vidal, at the University of Granada Department of Computer Architecture and Technology, and the University of Almería researcher Richard Carrillo.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
17-07-2012
Robot met gezichtsuitdrukkingen wil mensen gaan helpen
Is het een mens of is het een robot? Italiaanse wetenschappers willen beantwoording van die vraag zo moeilijk mogelijk maken en dus ontwikkelden ze FACE: een robot die er zeer menselijk uitziet en dankzij 100 ‘spieren’ in het gezicht verschillende gezichtsuitdrukkingen heeft.
FACE staat voor Facial Action Coding System. De onderzoekers hebben haar met een duidelijk doel voor ogen ontwikkeld. “Wij geloven op basis van verschillende psychologische studies dat zeer overtuigende mensachtige robots gebruikt kunnen worden om mensen met sociale problemen te trainen,” zo schrijven de onderzoekers in een recent paper. Ze denken dan bijvoorbeeld aan mensen met autisme of een persoonlijkheidsstoornis.
De robot. Foto: Faceteam.it
Menselijker
Maar voor het zover is, moeten de robots menselijker worden. En dat is niet alleen een kwestie van uiterlijk. “Het is ook nodig om hun sociale en emotionele responsen te verbeteren.” De onderzoekers wijzen erop dat gezichtsuitdrukkingen daarbij belangrijk zijn. Misschien bent u zich er niet van bewust, maar wanneer u met anderen communiceert, vertellen gezichtsuitdrukkingen de ander heel veel over uw emoties, waardoor de ander u beter begrijpt. “Om mensen met persoonlijkheidsstoornissen te helpen hun sociale beperkingen te overwinnen, is het nodig dat sociale robots kunnen analyseren hoe de mensen zich voelen.” Daarom is FACE ook in staat om gezichtsuitdrukkingen te vormen en begrijpen.
Spieren
Onder de ‘huid’ van de robot bevinden zich 100 ‘spieren’ die de kleinste bewegingen kunnen maken en dus best nauwkeurig gezichtsuitdrukkingen kunnen creëren. Experimenten met kinderen (sommigen hadden autisme) wijzen uit dat de gezichtsuitdrukkingen van FACE best goed herkenbaar zijn. Kinderen kregen de robot te zien en kregen de opdracht om de gezichtsuitdrukkingen te benoemen en na te doen. Zowel kinderen met autisme als gezonde kinderen konden ‘geluk’, ‘woede’ en ‘verdriet’ van het gezicht van FACE aflezen. ‘Angst’, ‘walging’ en ‘verbazing’ waren iets lastiger, zeker voor kinderen met autisme.
Kunstmatige partner
Er wordt op het moment nog volop aan FACE gesleuteld in een poging deze nog ‘menselijker’ te maken. Uiteindelijk is het de bedoeling dat mensen dat ongemakkelijke gevoel dat ze nu vaak bij communicatie met mensachtige robots hebben, kwijtraken. FACE heeft het wel in zich om dat punt te bereiken. Zo blijkt uit de onderzoeken ook dat mensen met autisme de robot niet zien als een machine, maar als een kunstmatige partner.
Niet alleen in het buitenland wordt gewerkt aan een sociaal-intelligente robot. Ook in Nederland houden wetenschappers zich ermee bezig. Bijvoorbeeld onderzoeker Matthijs Pontier. Hij vertelt hier over zijn werk
(scientias.nl)
Robot met gezichtsuitdrukkingen wil mensen gaan helpen

Is het een mens of is het een robot? Italiaanse wetenschappers willen beantwoording van die vraag zo moeilijk mogelijk maken en dus ontwikkelden ze FACE: een robot die er zeer menselijk uitziet en dankzij 100 ‘spieren’ in het gezicht verschillende gezichtsuitdrukkingen heeft.
FACE staat voor Facial Action Coding System. De onderzoekers hebben haar met een duidelijk doel voor ogen ontwikkeld. “Wij geloven op basis van verschillende psychologische studies dat zeer overtuigende mensachtige robots gebruikt kunnen worden om mensen met sociale problemen te trainen,” zo schrijven de onderzoekers in een recent paper. Ze denken dan bijvoorbeeld aan mensen met autisme of een persoonlijkheidsstoornis.

De robot. Foto: Faceteam.it
Menselijker
Maar voor het zover is, moeten de robots menselijker worden. En dat is niet alleen een kwestie van uiterlijk. “Het is ook nodig om hun sociale en emotionele responsen te verbeteren.” De onderzoekers wijzen erop dat gezichtsuitdrukkingen daarbij belangrijk zijn. Misschien bent u zich er niet van bewust, maar wanneer u met anderen communiceert, vertellen gezichtsuitdrukkingen de ander heel veel over uw emoties, waardoor de ander u beter begrijpt. “Om mensen met persoonlijkheidsstoornissen te helpen hun sociale beperkingen te overwinnen, is het nodig dat sociale robots kunnen analyseren hoe de mensen zich voelen.” Daarom is FACE ook in staat om gezichtsuitdrukkingen te vormen en begrijpen.
Spieren
Onder de ‘huid’ van de robot bevinden zich 100 ‘spieren’ die de kleinste bewegingen kunnen maken en dus best nauwkeurig gezichtsuitdrukkingen kunnen creëren. Experimenten met kinderen (sommigen hadden autisme) wijzen uit dat de gezichtsuitdrukkingen van FACE best goed herkenbaar zijn. Kinderen kregen de robot te zien en kregen de opdracht om de gezichtsuitdrukkingen te benoemen en na te doen. Zowel kinderen met autisme als gezonde kinderen konden ‘geluk’, ‘woede’ en ‘verdriet’ van het gezicht van FACE aflezen. ‘Angst’, ‘walging’ en ‘verbazing’ waren iets lastiger, zeker voor kinderen met autisme.

Kunstmatige partner
Er wordt op het moment nog volop aan FACE gesleuteld in een poging deze nog ‘menselijker’ te maken. Uiteindelijk is het de bedoeling dat mensen dat ongemakkelijke gevoel dat ze nu vaak bij communicatie met mensachtige robots hebben, kwijtraken. FACE heeft het wel in zich om dat punt te bereiken. Zo blijkt uit de onderzoeken ook dat mensen met autisme de robot niet zien als een machine, maar als een kunstmatige partner.
Niet alleen in het buitenland wordt gewerkt aan een sociaal-intelligente robot. Ook in Nederland houden wetenschappers zich ermee bezig. Bijvoorbeeld onderzoeker Matthijs Pontier. Hij vertelt hier over zijn werk
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Door het Uncanny Valley effect worden robots alleen maar meer creepy door ze menselijker te laten lijken....
Ik wordt veel liever geholpen door een robot met een metaal blok als hoofd dan door dat 'mens' hierboven...
Ik wordt veel liever geholpen door een robot met een metaal blok als hoofd dan door dat 'mens' hierboven...
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Waarschijnlijk komt er veel onderzoek vanuit de porno-industriequote:
Ik vind het ook maar eng, maar blijkbaar is er veel interesse naar humanoid robots.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

27-07-2012
Eerste robot die op water kan lopen en springen, is een feit
Wetenschappers hebben een robot ontwikkeld die niet alleen over water kan lopen, maar er ook op kan op en neer springen. De onderzoekers lieten zich inspireren door de schaatsenrijder.
Het is niet voor het eerst dat een robot is ontwikkeld die over water kan lopen. Wel nieuw is dat de robot zowel over water kan lopen als op water kan springen. En dat was nog een stuk ingewikkelder dan het misschien lijkt.
Schaatsenrijder
Zoals gezegd is de robot geïnspireerd op de schaatsenrijder. Deze insecten springen op het wateroppervlak. Om een robot ook zo ver te krijgen, moest deze zich op het wateroppervlak afzetten. Meestal zakken zijn pootjes daarbij door het wateroppervlak heen. De onderzoekers bedachten een andere techniek. Ze maakten de pootjes van de robot van poreus, waterafstotend foam.
Ver springen
Het resultaat mag er zijn. De robot weegt 1100 keer meer dan een schaatsenrijder. En toch kan deze meer dan 14 centimeter ver springen. Er zijn zelfs experimenten geweest waarbij de robot 35,5 centimeter ver sprong. Die afstand is meer dan twee keer zo groot als de afstand tussen de ‘kop’ en ‘staart’ van de robot.
Uiteindelijk hopen de onderzoekers dat hun studie leidt tot een robot die over water kan wandelen, maar ook obstakels op het water uit de weg kan gaan door erover heen te springen. Het volledige onderzoek is terug te vinden in het blad Applied Materials & Interfaces.
(scientias.nl)
Eerste robot die op water kan lopen en springen, is een feit

Wetenschappers hebben een robot ontwikkeld die niet alleen over water kan lopen, maar er ook op kan op en neer springen. De onderzoekers lieten zich inspireren door de schaatsenrijder.
Het is niet voor het eerst dat een robot is ontwikkeld die over water kan lopen. Wel nieuw is dat de robot zowel over water kan lopen als op water kan springen. En dat was nog een stuk ingewikkelder dan het misschien lijkt.
Schaatsenrijder
Zoals gezegd is de robot geïnspireerd op de schaatsenrijder. Deze insecten springen op het wateroppervlak. Om een robot ook zo ver te krijgen, moest deze zich op het wateroppervlak afzetten. Meestal zakken zijn pootjes daarbij door het wateroppervlak heen. De onderzoekers bedachten een andere techniek. Ze maakten de pootjes van de robot van poreus, waterafstotend foam.
Ver springen
Het resultaat mag er zijn. De robot weegt 1100 keer meer dan een schaatsenrijder. En toch kan deze meer dan 14 centimeter ver springen. Er zijn zelfs experimenten geweest waarbij de robot 35,5 centimeter ver sprong. Die afstand is meer dan twee keer zo groot als de afstand tussen de ‘kop’ en ‘staart’ van de robot.
Uiteindelijk hopen de onderzoekers dat hun studie leidt tot een robot die over water kan wandelen, maar ook obstakels op het water uit de weg kan gaan door erover heen te springen. Het volledige onderzoek is terug te vinden in het blad Applied Materials & Interfaces.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...


Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Leuk dat ik dit topic zie. Ik las dit laatst in de Quest van augustus 2012, heb er even wat foto's van gemaakt.






If not now, then when.
Leuk artikel!. Ik zag op wikipedia dat de 'uncanny valley' een hypothese is, dus niet gestaafd met experimenten. Tevens stamt het uit 1970, nog voor de tijd van computers. Tegenwoordig heeft iedere een 'robot' in zijn broekzak. Bij onze en de komende generaties vermoed ik dus dat de acceptatie van mensachtige robots stukke beter is.
quote:Lifelike, cost-effective robotic Sandia Hand can disable IEDs
ALBUQUERQUE, N.M. – Sandia National Laboratories has developed a cost-effective robotic hand that can be used in disarming improvised explosive devices, or IEDs.
Principal investigator Curt Salisbury developed an affordable robotic hand that is dexterous enough to mimic the capabilities of the human hand. (Photo by Randy Montoya) Click on the thumbnail for a high-resolution image.
The Sandia Hand addresses challenges that have prevented widespread adoption of other robotic hands, such as cost, durability, dexterity and modularity.
.......

Sandia
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Was ook al een post van op tweakers
http://tweakers.net/nieuw(...)lende-robothand.html
en daarna vlak nog 1 over een flexibele robots met camouflagetechnieken
http://tweakers.net/nieuw(...)flagetechnieken.html
http://tweakers.net/nieuw(...)lende-robothand.html
en daarna vlak nog 1 over een flexibele robots met camouflagetechnieken
http://tweakers.net/nieuw(...)flagetechnieken.html
Ik denk eerder dat men gewoon robots accepteert, zonder dat ze er mensachtig uit hoeven te zien. De uncanny valley gaat namelijk ook nog steeds prima op voor bijvoorbeeld computer geanimeerde gezichten. Wall-e heeft geloofwaardigere emoties dan bijvoorbeeld de mensen uit een final fantasy animatie film. Je kan robots prima menselijk maken zonder dat ze er menselijk uit hoeven te zien...quote:
Leuk artikel!. Ik zag op wikipedia dat de 'uncanny valley' een hypothese is, dus niet gestaafd met experimenten. Tevens stamt het uit 1970, nog voor de tijd van computers. Tegenwoordig heeft iedere een 'robot' in zijn broekzak. Bij onze en de komende generaties vermoed ik dus dat de acceptatie van mensachtige robots stukke beter is.
Ze proberen robots mensachtiger te maken zodat ze sneller geaccepteerd worden, terwijl ik juist denk dat de toekomstige generatie juist geen mensachtige robots nodig heeft om ze toch te accepteren. Juist omdat iedereen dus al een niet menselijke robot in z'n broekzak heeft zoals jij het idd stelt.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
NYTquote:Skilled work, without the worker
DRACHTEN, the Netherlands — At the Philips Electronics factory on the coast of China, hundreds of workers use their hands and specialized tools to assemble electric shavers. That is the old way.
Articles and multimedia in this series examine the challenges posed by increasingly globalized high-tech industries.
At a sister factory here in the Dutch countryside, 128 robot arms do the same work with yoga-like flexibility. Video cameras guide them through feats well beyond the capability of the most dexterous human.
One robot arm endlessly forms three perfect bends in two connector wires and slips them into holes almost too small for the eye to see. The arms work so fast that they must be enclosed in glass cages to prevent the people supervising them from being injured. And they do it all without a coffee break — three shifts a day, 365 days a year.
All told, the factory here has several dozen workers per shift, about a tenth as many as the plant in the Chinese city of Zhuhai.
This is the future. A new wave of robots, far more adept than those now commonly used by automakers and other heavy manufacturers, are replacing workers around the world in both manufacturing and distribution. Factories like the one here in the Netherlands are a striking counterpoint to those used by Apple and other consumer electronics giants, which employ hundreds of thousands of low-skilled workers.
“With these machines, we can make any consumer device in the world,” said Binne Visser, an electrical engineer who manages the Philips assembly line in Drachten.
Many industry executives and technology experts say Philips’s approach is gaining ground on Apple’s. Even as Foxconn, Apple’s iPhone manufacturer, continues to build new plants and hire thousands of additional workers to make smartphones, it plans to install more than a million robots within a few years to supplement its work force in China.
.......
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen

LOL! Dat ziet er echt bizar uit. Ik durf het niet met zekerheid te zeggen (in China weet je het nooit) maar het lijkt natuurlijk wel heel erg nep allemaal Een hele robot om wat noodles af te schrapen terwijl je daar allang machines voor hebt die het voor een tiende van de prijs doen. Bovendien kunnen ze verder niets. Maar wel geinige hoax.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
21-08-2012
Robot wandelt door straten van Freiburg
© epa.
Een robot van 1,70 meter hoog en 100 kilo zwaar heeft 4 kilometer door de Duitse stad Freiburg gewandeld zonder te botsen. De robot, Obelix genaamd, herkende zelf voetpaden, stoepranden en tegenliggers. Alleen rode verkeerslichten bleken te lastig voor de kleurenblinde 'Europarobot', die dan met de hand moest worden bediend.
© epa.
Het apparaat bedacht voor zijn eerste praktijktest ook zelf de kortste weg van de technische faculteit naar het standbeeld Bertoldsbrunnen in het stadscentrum. Hij deed bijna 3,5 uur over het traject. Dat was langer dan gepland, maar kwam vooral omdat hij steeds wachtte voor cameramensen op zijn pad, meldt omroep SWR.
De robot is een project van 6 miljoen euro van een internationaal onderzoeksteam rond Wolfram Burgard van de Universiteit van Freiburg.
(HLN)
Robot wandelt door straten van Freiburg

© epa.
Een robot van 1,70 meter hoog en 100 kilo zwaar heeft 4 kilometer door de Duitse stad Freiburg gewandeld zonder te botsen. De robot, Obelix genaamd, herkende zelf voetpaden, stoepranden en tegenliggers. Alleen rode verkeerslichten bleken te lastig voor de kleurenblinde 'Europarobot', die dan met de hand moest worden bediend.

© epa.
Het apparaat bedacht voor zijn eerste praktijktest ook zelf de kortste weg van de technische faculteit naar het standbeeld Bertoldsbrunnen in het stadscentrum. Hij deed bijna 3,5 uur over het traject. Dat was langer dan gepland, maar kwam vooral omdat hij steeds wachtte voor cameramensen op zijn pad, meldt omroep SWR.
De robot is een project van 6 miljoen euro van een internationaal onderzoeksteam rond Wolfram Burgard van de Universiteit van Freiburg.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
24-08-2012
Wetenschappers maken 'zelfbewuste' robot
Wetenschappers van de Amerikaanse Yale universiteit hebben een robot gebouwd die een vorm van zelfbewustzijn vertoont. De robot kan de positie van zijn eigen arm in een 3d-ruimte beredeneren aan de hand van zijn spiegelbeeld.
De robot met de naam Nico is geprogrammeerd om in de spiegel te kijken en te beredeneren of hij zichzelf ziet. Op dit moment is de robot zich alleen bewust van zijn eigen arm en kan Nico de positie van zijn eigen arm in een 3d-ruimte met grote precisie berekenen. Het is voor het eerst dat een robot deze vorm van zelfbewustzijn is geleerd. De wetenschappers zijn nu bezig om Nico ook de positie van andere lichaamsdelen te laten herkennen.
Het programmeren van een robot om zelfbewust te zijn wordt gezien als een grote mijlpaal in de kunstmatige intelligentie. Zelfbewustzijn is een belangrijke maatstaf van intelligentie: waar mensen zich bewust zijn van zichzelf zijn veel dieren dit niet. Om dit te testen gebruiken wetenschappers de spiegeltest. Bij de spiegeltest wordt een kenmerk aangebracht op het gezicht van een dier, waarna het dier voor een spiegel wordt gezet. Het idee is dat als een dier zelfbewust is, het zal proberen het kenmerk bij zichzelf aan te raken.
Tot nu toe zijn slechts enkele dieren geslaagd voor de spiegeltest, waaronder sommige aapsoorten, dolfijnen en olifanten. De wetenschappers verwachten dat Nico binnenkort zal kunnen slagen voor de spiegeltest. Zelfbewustzijn bij robots is belangrijk zodra robots gebruikt gaan worden voor schoonmaken en andere huishoudelijke taken, zodat ze geen ongelukken veroorzaken. Ook is het belangrijk dat robots 'snappen' dat hun eigen arm zich niet aan de andere kant van de spiegel bevindt.
(Tweakers.net)
Wetenschappers maken 'zelfbewuste' robot
Wetenschappers van de Amerikaanse Yale universiteit hebben een robot gebouwd die een vorm van zelfbewustzijn vertoont. De robot kan de positie van zijn eigen arm in een 3d-ruimte beredeneren aan de hand van zijn spiegelbeeld.
De robot met de naam Nico is geprogrammeerd om in de spiegel te kijken en te beredeneren of hij zichzelf ziet. Op dit moment is de robot zich alleen bewust van zijn eigen arm en kan Nico de positie van zijn eigen arm in een 3d-ruimte met grote precisie berekenen. Het is voor het eerst dat een robot deze vorm van zelfbewustzijn is geleerd. De wetenschappers zijn nu bezig om Nico ook de positie van andere lichaamsdelen te laten herkennen.
Het programmeren van een robot om zelfbewust te zijn wordt gezien als een grote mijlpaal in de kunstmatige intelligentie. Zelfbewustzijn is een belangrijke maatstaf van intelligentie: waar mensen zich bewust zijn van zichzelf zijn veel dieren dit niet. Om dit te testen gebruiken wetenschappers de spiegeltest. Bij de spiegeltest wordt een kenmerk aangebracht op het gezicht van een dier, waarna het dier voor een spiegel wordt gezet. Het idee is dat als een dier zelfbewust is, het zal proberen het kenmerk bij zichzelf aan te raken.
Tot nu toe zijn slechts enkele dieren geslaagd voor de spiegeltest, waaronder sommige aapsoorten, dolfijnen en olifanten. De wetenschappers verwachten dat Nico binnenkort zal kunnen slagen voor de spiegeltest. Zelfbewustzijn bij robots is belangrijk zodra robots gebruikt gaan worden voor schoonmaken en andere huishoudelijke taken, zodat ze geen ongelukken veroorzaken. Ook is het belangrijk dat robots 'snappen' dat hun eigen arm zich niet aan de andere kant van de spiegel bevindt.

(Tweakers.net)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
02-08-2012
Blieb! De zorgrobot komt eraan
Een robot aan je ziekenhuisbed die je je medicijnen aanreikt of metalen handen die je billen wassen: het lijkt een typisch geval van sciencefiction. Maar ook in Nederland kunnen we steeds vaker ‘zorgbots’ verwachten. Is de verpleegster op haar retour?
De opmars
Zorgrobots, robots die helpen bij de verzorging van patiënten, zijn bezig aan een opmars. In de Verenigde Staten en in Japan, maar ook dichterbij in Duitsland en in Denemarken worden diverse robots al ingezet voor de ondersteuning of ter vervanging van bijvoorbeeld een verpleegkundige. In sommige gevallen nemen robots de verantwoordelijkheid van zorgverleners zelfs helemaal over.
De Care-o-Bot zorgrobot mag dan dingen kunnen opruimen, even een praatje maken is er niet bij. Afbeelding: © Wikimedia Commons
Hoe je je die hulp van zulke robots dan wel moet voorstellen? Tot nu toe moet je vooral aan robots denken die medicijnen en lakens uitdelen, die je uit bed helpen of die je te eten geven, zo blijkt uit onderzoek.
Dat dergelijke zorgrobots steeds populairder worden is misschien niet heel verbazingwekkend. Niet alleen kan de inzet van robots kostenbesparend werken; ze zijn nooit moe – of chagrijnig.
“In Japan dat net als veel westerse landen veel vergrijzing kent worden robots al regelmatig ingezet in de bejaardenzorg, ook vanwege hun non-stop beschikbaarheid,” vertelt Mannes Poel, onderzoeker in Human Media Interaction aan de Universiteit Twente.
Zorgrobots
En daarbij hoeft het niet eens altijd om praktische hulp te gaan. Zo schaffen ook steeds meer Nederlandse zieken- en bejaardenhuizen de therapeutische robotzeehond Paro aan.
Paro de knuffelrobot. Afbeelding: © Wikimedia Commons
Paro is ontworpen om een kalmerend effect te hebben en emotionele reacties te ontlokken aan patiënten.
Een belangrijke concullega van Paro is bovendien Eva de Zorgrobot. Ze kan zo met een patiënt mee naar huis, want haar huishoudelijke vaardigheden en leergierigheid maken haar uitermate geschikt voor de thuiszorg.
“Weer andere robots kunnen verpleegkundigen bijvoorbeeld zwaar werk besparen,” vertelt onderzoekster Van Wynsberghe, tevens van de Universiteit Twente.
De in Delft ´geboren´ zorgrobot Eva in actie.
Maar de filosofe, die voor haar onlangs afgeronde promotie de ethische kant van robots in de zorg bestudeerde, wijst er tegelijkertijd ook op dat wanneer het om de inzet van zorgrobots in de zorg gaat het niet alleen maar goud, eh, metaal is wat er blinkt.
Culture shock
Zo kent een robot kent geen empathie, en begrijpt niet het belang van privacy en vertrouwen.
“Stel je bijvoorbeeld een robot voor die medicijnen uitdeelt. Als de patiënt weigert de medicijnen aan te nemen, wat moet de robot dan? Hij kan de medicijnen opnieuw aanbieden, maar wanneer precies? Een robot beschikt niet over het vermogen om in gesprek te gaan met de patiënt en deze te overtuigen de medicijnen alsnog in te nemen.”
Afbeelding van een verpleegster in de jaren veertig. Vervangt de zorgbot straks de verpleegster? Afbeelding: © Wikimedia Commons
Daarnaast: wat gebeurt er als ‘Robbie’ fouten maakt? Wie is er dan aansprakelijk?
En moeten we eigenlijk wel willen dat uit financiële overwegingen kille robots menselijk contact in de zorg gaan vervangen? Getuigt dat niet van grote morele armoede, vragen sommigen zich af.
Maatwerk
Van Wynsberghe stelt in elk geval dat de taken van de robot afgestemd moeten worden op de behoefte van de patiënt en de context. “Je kunt niet simpel stellen, deze robot is wel geschikt voor de zorg en deze robot niet. Dat hangt van heel veel factoren af. Elke case moet je opnieuw beoordelen.”
Ze ontwierp daartoe een kader voor de ethische beoordeling van zorgrobots, dat bovendien ook ingezet kan worden om het ontwerp van zorgrobots te sturen. Het zogenaamde Care-Centered Framework neemt daarbij vijf onderdelen als uitgangspunt: context, handeling, betrokkenen bij handeling, rol van de robot en de waarden waarop de robot geprogrammeerd is. Van Wynsberghe: “We moeten begrijpen wat we aan het doen zijn vóórdat we de robot gaan maken".
Aimee van Wynsberghe. “Robots kunnen mensen aanvullen of vervangen, maar dat moet nooit een automatisme worden.” Afbeelding: © UT
Urine robot
Een robot die wat Canadese onderzoekster betreft in elk geval door de check zou moeten komen is de door haarzelf bedachte weebot: een robot die de urine onderzoekt van patiënten die chemotherapie krijgen. “De aanwezigheid van gevaarlijke chemicaliën maken dit tot een risicovolle taak voor menselijke verpleegkundigen.”
Kortom, met een beetje mazzel hebben we straks ‘the best of two worlds’. Én robot- én mensenhanden om ons te vertroetelen en onze gezondheid te optimaliseren.
Bronnen
van Amerom, M., 2011, ‘Robot dogs can help beat loneliness.’UT Nieuws. 6 april.
Gids.fm, 2011, Gast van de Dag. Vervangt de zorgrobot straks de verpleegster? Radio-uitzending 23 april.
Royakkers, L, F. Daemen en R. van Est, 2012, Overal robots. Automatisering van de liefde tot de dood. Ratheneau Reeks. Den Haag: Boom Lemma.
Universiteit Twente, 2012, ‘Met zorg robots ontwerpen.’ Persbericht. 30 juli
(Kennislink)
Blieb! De zorgrobot komt eraan
Een robot aan je ziekenhuisbed die je je medicijnen aanreikt of metalen handen die je billen wassen: het lijkt een typisch geval van sciencefiction. Maar ook in Nederland kunnen we steeds vaker ‘zorgbots’ verwachten. Is de verpleegster op haar retour?
De opmars
Zorgrobots, robots die helpen bij de verzorging van patiënten, zijn bezig aan een opmars. In de Verenigde Staten en in Japan, maar ook dichterbij in Duitsland en in Denemarken worden diverse robots al ingezet voor de ondersteuning of ter vervanging van bijvoorbeeld een verpleegkundige. In sommige gevallen nemen robots de verantwoordelijkheid van zorgverleners zelfs helemaal over.

De Care-o-Bot zorgrobot mag dan dingen kunnen opruimen, even een praatje maken is er niet bij. Afbeelding: © Wikimedia Commons
Hoe je je die hulp van zulke robots dan wel moet voorstellen? Tot nu toe moet je vooral aan robots denken die medicijnen en lakens uitdelen, die je uit bed helpen of die je te eten geven, zo blijkt uit onderzoek.
Dat dergelijke zorgrobots steeds populairder worden is misschien niet heel verbazingwekkend. Niet alleen kan de inzet van robots kostenbesparend werken; ze zijn nooit moe – of chagrijnig.
“In Japan dat net als veel westerse landen veel vergrijzing kent worden robots al regelmatig ingezet in de bejaardenzorg, ook vanwege hun non-stop beschikbaarheid,” vertelt Mannes Poel, onderzoeker in Human Media Interaction aan de Universiteit Twente.
Zorgrobots
En daarbij hoeft het niet eens altijd om praktische hulp te gaan. Zo schaffen ook steeds meer Nederlandse zieken- en bejaardenhuizen de therapeutische robotzeehond Paro aan.

Paro de knuffelrobot. Afbeelding: © Wikimedia Commons
Paro is ontworpen om een kalmerend effect te hebben en emotionele reacties te ontlokken aan patiënten.
Een belangrijke concullega van Paro is bovendien Eva de Zorgrobot. Ze kan zo met een patiënt mee naar huis, want haar huishoudelijke vaardigheden en leergierigheid maken haar uitermate geschikt voor de thuiszorg.
“Weer andere robots kunnen verpleegkundigen bijvoorbeeld zwaar werk besparen,” vertelt onderzoekster Van Wynsberghe, tevens van de Universiteit Twente.
De in Delft ´geboren´ zorgrobot Eva in actie.

Maar de filosofe, die voor haar onlangs afgeronde promotie de ethische kant van robots in de zorg bestudeerde, wijst er tegelijkertijd ook op dat wanneer het om de inzet van zorgrobots in de zorg gaat het niet alleen maar goud, eh, metaal is wat er blinkt.
Culture shock
Zo kent een robot kent geen empathie, en begrijpt niet het belang van privacy en vertrouwen.
“Stel je bijvoorbeeld een robot voor die medicijnen uitdeelt. Als de patiënt weigert de medicijnen aan te nemen, wat moet de robot dan? Hij kan de medicijnen opnieuw aanbieden, maar wanneer precies? Een robot beschikt niet over het vermogen om in gesprek te gaan met de patiënt en deze te overtuigen de medicijnen alsnog in te nemen.”

Afbeelding van een verpleegster in de jaren veertig. Vervangt de zorgbot straks de verpleegster? Afbeelding: © Wikimedia Commons
Daarnaast: wat gebeurt er als ‘Robbie’ fouten maakt? Wie is er dan aansprakelijk?
En moeten we eigenlijk wel willen dat uit financiële overwegingen kille robots menselijk contact in de zorg gaan vervangen? Getuigt dat niet van grote morele armoede, vragen sommigen zich af.
Maatwerk
Van Wynsberghe stelt in elk geval dat de taken van de robot afgestemd moeten worden op de behoefte van de patiënt en de context. “Je kunt niet simpel stellen, deze robot is wel geschikt voor de zorg en deze robot niet. Dat hangt van heel veel factoren af. Elke case moet je opnieuw beoordelen.”
Ze ontwierp daartoe een kader voor de ethische beoordeling van zorgrobots, dat bovendien ook ingezet kan worden om het ontwerp van zorgrobots te sturen. Het zogenaamde Care-Centered Framework neemt daarbij vijf onderdelen als uitgangspunt: context, handeling, betrokkenen bij handeling, rol van de robot en de waarden waarop de robot geprogrammeerd is. Van Wynsberghe: “We moeten begrijpen wat we aan het doen zijn vóórdat we de robot gaan maken".

Aimee van Wynsberghe. “Robots kunnen mensen aanvullen of vervangen, maar dat moet nooit een automatisme worden.” Afbeelding: © UT
Urine robot
Een robot die wat Canadese onderzoekster betreft in elk geval door de check zou moeten komen is de door haarzelf bedachte weebot: een robot die de urine onderzoekt van patiënten die chemotherapie krijgen. “De aanwezigheid van gevaarlijke chemicaliën maken dit tot een risicovolle taak voor menselijke verpleegkundigen.”
Kortom, met een beetje mazzel hebben we straks ‘the best of two worlds’. Én robot- én mensenhanden om ons te vertroetelen en onze gezondheid te optimaliseren.
Bronnen
van Amerom, M., 2011, ‘Robot dogs can help beat loneliness.’UT Nieuws. 6 april.
Gids.fm, 2011, Gast van de Dag. Vervangt de zorgrobot straks de verpleegster? Radio-uitzending 23 april.
Royakkers, L, F. Daemen en R. van Est, 2012, Overal robots. Automatisering van de liefde tot de dood. Ratheneau Reeks. Den Haag: Boom Lemma.
Universiteit Twente, 2012, ‘Met zorg robots ontwerpen.’ Persbericht. 30 juli
(Kennislink)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Dat stukje over wie er verantwoordelijk is als er iets fout gaat is wel interessant. Als het echt een bug blijkt te zijn zouden dan de programmeurs schuldig zijn? Dat lijkt me allemaal erg lastig te controleren. Bovendien, wie wil er dan nog robots programmeren als blijkt dat de programmeur nog jaren lang opeens in de problemen kan komen omdat de robots die zijn software gebruiken ergens een foutje maken.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Naturequote:Robots hunt neurons to record brain activity
Devices could reveal inner workings of neurons and how they communicate with each other.
A robot that can access the internal workings of neurons could be scaled up to allow 100 cells to be studied at a time.
Automated assistance may soon be available to neuroscientists tackling the brain’s complex circuitry, according to research presented last week at the Aspen Brain Forum in Colorado. Robots that can find and simultaneously record the activity of dozens of neurons in live animals could help researchers to reveal how connected cells interpret signals from one another and transmit information across brain areas — a task that would be impossible using single-neuron studies.
The robots are designed to perform whole-cell patch-clamping, a difficult but powerful method that allows neuroscientists to access neurons' internal electrical workings, says Edward Boyden of the Massachusetts Institute of Technology in Cambridge, who is leading the work.
Manually performing the method on live animals requires extensive training to perfect and, as a result, only a handful of neurophysiologists use the technique, says Boyden, who presented at the conference. He is developing the automated tool with Craig Forest at the Georgia Institute of Technology in Atlanta and others. “We think that it helps democratize procedures that require a lot of skill,” he says.
In May, the group described how a basic version of the robot can record electrical currents in single neurons in the brains of anaesthetized mice1. The robot finds its target on the basis of characteristic changes in the electrical environment near neurons. Then, the device nicks the cell’s membrane and seals itself around the tiny hole to access the neuron's contents. On 24 August, Boyden presented results showing that a more advanced version of the robot could be used to identify and probe four neurons at once — and he says he wants to push the design further, perhaps to tap as many as 100 neurons at a time.
Related stories
The researchers have also begun tweaking the robot to harvest the contents of cells, which could be tested for gene expression. Relating gene expression to neuronal activity could aid our understanding of what goes wrong in neurological disorders. “Maybe gene expression does specify electrical properties of neurons, and maybe it doesn’t. If it does, that would be fantastic to know,” says Boyden.
Neural recordings from live animals are most often collected using electrodes inserted between cells. These external recordings detect outgoing neuronal signals, but cannot measure the roiling electrical activity within each cell that determines whether and how rapidly a neuron fires.
Recordings made inside single neurons, including those obtained from whole-cell patch-clamping, have revealed some clues about how incoming signals — observed as positive and negative electrical currents — combine to influence a neuron’s outgoing transmissions. Recordings from multiple cells could help researchers to work out which neurons talk to each other and how they silence or excite one another to affect cognition or behaviour.
Other researchers have developed tools intended to record from inside up to 12 neurons at once2, but the technology has not yet been tested in live animals, and it still requires direct control by a human experimenter.
Computational neuroscientist Sean Hill, director of the International Neuroinformatics Coordinating Facility in Stockholm, says that Boyden’s robot could save time. But he cautions that it might also remove a crucial element of human judgement in deciding which types of neuron to record from. “The proof will be in using it and seeing how well it performs,” he says.
Prakash Kara, a neuroscientist at the Medical University of South Carolina in Charleston, says that the technique looks “extremely promising”. However, Kara notes that the technology may be difficult to scale up to allow researchers to record large numbers of neurons. Each recording element typically exerts a small amount of pressure on the brain, so on a large scale has the potential to cause damage.
Despite these technical hurdles, Kara says that even the single-channel robot offers benefits. “People who are not terribly experienced with whole-cell patch-clamping might be able to do experiments that they otherwise couldn’t,” he says.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Volgens mij kan een programmeur nooit persoonlijk aansprakelijk gesteld worden, enkel het bedrijf waarvoor hij werkzaam is.quote:
Dat stukje over wie er verantwoordelijk is als er iets fout gaat is wel interessant. Als het echt een bug blijkt te zijn zouden dan de programmeurs schuldig zijn? Dat lijkt me allemaal erg lastig te controleren. Bovendien, wie wil er dan nog robots programmeren als blijkt dat de programmeur nog jaren lang opeens in de problemen kan komen omdat de robots die zijn software gebruiken ergens een foutje maken.




Deze kost nu zo'n 3000 euro:

[ Bericht 17% gewijzigd door Probably_on_pcp op 03-09-2012 08:12:53 ]
"An educated citizenry is a vital requisite for our survival as a free people."
Leuke website voor in de OP:
http://robots.nu/
Hier staan allerlei robots die je tegenwoordig kunt tegenkomen. Erg cool
http://robots.nu/
Hier staan allerlei robots die je tegenwoordig kunt tegenkomen. Erg cool
"An educated citizenry is a vital requisite for our survival as a free people."
Ik mis warrobots op die site. Eigenlijk is daar de meeste voorruitgang in momenteel. Drones zien er dan wel niet uit als robots, eigenlijk zijn ze dat wel. En die dingen worden echt in rap tempo doorontwikkeld. Een nieuwe generatie drones krijgt zelfs twee robot armen om dingen op te kunnen pakken.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
http://www.drexel.edu/now(...)ned-aerial-vehicles/quote:
Heb je een linkje van die drone met 2 armen?
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

Coolquote:
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
06-09-2012
Robotcheeta verbreekt snelheidsrecord Usain Bolt
Herinnert u zich nog de robotcheeta waar begin dit jaar een artikel over verscheen op Scientias? Wel, deze robotcheeta heeft zijn eigen snelheidsrecord verbroken en rent nu sneller dan Usain Bolt.
In maart 2012 zette de robotcheeta een record neer van 18 mijl per uur, oftewel 28,97 kilometer per uur. Nu – amper vijf maanden later – legt de robotcheeta 28,3 mijl per uur af. Omgerekend is dat zo’n 45,5 kilometer per uur.
De topsnelheid van Usain Bolt tijdens de 100 meter sprint was 43,93 kilometer per uur. Dit betekent dat de robotcheeta Bolt makkelijk kan verslaan in een race.
Sloom jachtluipaard
Toch zal het nog wel een tijd duren voordat de robotcheeta zijn organische soortgenoten kan bijhouden. Het jachtluipaard heeft namelijk een topsnelheid van 110 kilometer per uur en is daarmee het snelste landdier ter wereld.
Plannen?
Onderzoekers hebben op dit moment nog geen concrete plannen met de robot. Het zijn echt nog experimenten die in een veel later stadium moeten leiden tot een heel snelle en stabiele robot. Zo’n robot zou handig zijn voor op het slagveld. Al is het alleen maar om de tegenstander angst aan te jagen: want een beetje eng is het toch wel wanneer tientallen van deze robots met grote snelheid aan komen stampen.
(scientias.nl)
Robotcheeta verbreekt snelheidsrecord Usain Bolt

Herinnert u zich nog de robotcheeta waar begin dit jaar een artikel over verscheen op Scientias? Wel, deze robotcheeta heeft zijn eigen snelheidsrecord verbroken en rent nu sneller dan Usain Bolt.
In maart 2012 zette de robotcheeta een record neer van 18 mijl per uur, oftewel 28,97 kilometer per uur. Nu – amper vijf maanden later – legt de robotcheeta 28,3 mijl per uur af. Omgerekend is dat zo’n 45,5 kilometer per uur.
De topsnelheid van Usain Bolt tijdens de 100 meter sprint was 43,93 kilometer per uur. Dit betekent dat de robotcheeta Bolt makkelijk kan verslaan in een race.
Sloom jachtluipaard
Toch zal het nog wel een tijd duren voordat de robotcheeta zijn organische soortgenoten kan bijhouden. Het jachtluipaard heeft namelijk een topsnelheid van 110 kilometer per uur en is daarmee het snelste landdier ter wereld.
Plannen?
Onderzoekers hebben op dit moment nog geen concrete plannen met de robot. Het zijn echt nog experimenten die in een veel later stadium moeten leiden tot een heel snelle en stabiele robot. Zo’n robot zou handig zijn voor op het slagveld. Al is het alleen maar om de tegenstander angst aan te jagen: want een beetje eng is het toch wel wanneer tientallen van deze robots met grote snelheid aan komen stampen.

(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Harvard researchers develop new kind of soft robotic gripper
Because traditional robot hands or grippers were first created to assist in production type enterprises, e.g. to help build cars, etc., they have not been very good at working with soft materials. For that reason, over the past couple of years, robot engineers have been working to come up with new ways to give robot hands the ability to manipulate small and/or fragile objects. Now a team from Harvard working with the Department of Energy and DARPA has come up with a tentacle type gripper that is sensitive enough to lift a flower without crushing it. They have had their paper describing their results published in the journal Advanced Materials
Most robot hands work in ways similar to the human hand, they have appendages that make use of joints to close around an object and then clamp down it with enough pressure to allow for picking things up and setting them down. Newer soft bodied robot hands take their cue from soft bodied animals like snakes and in this case, octopi, which grasp objects by covering them with a single soft appendage and squeezing.
The result is a gripper the research teams calls a tentacle, which like the octopus, is able to wrap around (or be wrapped around) an object's different parts, spreading the pressure exerted against it in a very gentile way. The tentacle is a single plastic flexible tube with several channels inside that can each be pumped full of air, causing the pressure needed to hold on to an object. But because each channel is pressurized independently of the others, the tentacle can also be caused to curl in a directed fashion, allowing for wrapping, then squeezing.
By adding just enough air pressure for the object to be lifted, the tentacle can be made to provide a very gentle lift. And because its abilities are based on air pressure, the tentacle can also be reduced in size when not in use, something that could come in handy for work in tight spaces.
The multiple channel approach allows for the tentacle to curl in three dimensions, whereas others up till now could only curl in one direction. To add even more functionality, the team has tried affixing a very small camera to the end of the tentacle, a syringe and even a suction cup to allow the tentacle to latch onto objects or hold them in different ways.
http://www.zeitnews.org/a(...)soft-robotic-gripper
Because traditional robot hands or grippers were first created to assist in production type enterprises, e.g. to help build cars, etc., they have not been very good at working with soft materials. For that reason, over the past couple of years, robot engineers have been working to come up with new ways to give robot hands the ability to manipulate small and/or fragile objects. Now a team from Harvard working with the Department of Energy and DARPA has come up with a tentacle type gripper that is sensitive enough to lift a flower without crushing it. They have had their paper describing their results published in the journal Advanced Materials
Most robot hands work in ways similar to the human hand, they have appendages that make use of joints to close around an object and then clamp down it with enough pressure to allow for picking things up and setting them down. Newer soft bodied robot hands take their cue from soft bodied animals like snakes and in this case, octopi, which grasp objects by covering them with a single soft appendage and squeezing.

The result is a gripper the research teams calls a tentacle, which like the octopus, is able to wrap around (or be wrapped around) an object's different parts, spreading the pressure exerted against it in a very gentile way. The tentacle is a single plastic flexible tube with several channels inside that can each be pumped full of air, causing the pressure needed to hold on to an object. But because each channel is pressurized independently of the others, the tentacle can also be caused to curl in a directed fashion, allowing for wrapping, then squeezing.
By adding just enough air pressure for the object to be lifted, the tentacle can be made to provide a very gentle lift. And because its abilities are based on air pressure, the tentacle can also be reduced in size when not in use, something that could come in handy for work in tight spaces.
The multiple channel approach allows for the tentacle to curl in three dimensions, whereas others up till now could only curl in one direction. To add even more functionality, the team has tried affixing a very small camera to the end of the tentacle, a syringe and even a suction cup to allow the tentacle to latch onto objects or hold them in different ways.
http://www.zeitnews.org/a(...)soft-robotic-gripper
"An educated citizenry is a vital requisite for our survival as a free people."



Your next assembly lines may have Baxter robot doing pick-up
Rethink Robotics is introducing Baxter to the manufacturing sector with a note: Baxter can ignite a revolution in breaking down costs and safety barriers holding back automation in American manufacturing. The Boston-based company says the $22,000 (list price) robot is a fraction of the cost of traditional industrial robots "with zero integration required." Baxter has been expressly designed to work on assembly lines to perform menial tasks. Baxter has two arms, each with seven degrees of freedom, and a reach similar to that of a human, to take over the mindless menial tasks. It can load, unload, sort, pack, unpack, snap-fit, grind and polish.
What is not at all mindless about Baxter is its design in that, for an industrial robot, Baxter enjoys an incredible lightness of non-being. Baxter has thick, round arms, but they are not heavy. The arm moves in a fluid motion. "When you hold the cuff, the robot goes into gravity-compensation," said Rodney Brooks, the company founder, "zero-force mode," as if the arm is floating. The company offers Baxter with two kinds of grippers to choose from. Electric parallel grippers enable Baxter to pick up objects of varying sizes. Vacuum cup grippers are meant for hard-to-grasp objects, such as smooth, nonporous or relatively flat items.
While Baxter is not the ideal choice for tasks that require an extremely strong or fast industrial robot, Baxter is smart enough to adapt to changes. The robot uses vision to locate and grasp objects, and can be programmed to perform a new task just by holding its arms and moving them to the desired position. The robot can continue to work even after missing a pick-up or dropping a part. It can visually detect parts and adapt to variations in part placement and conveyor speed. If Baxter drops an object, it knows to get another before trying to finish the task.
Another differentiator is that, while Baxter is smart, it does not require a high learning curve. One of the argued barriers to industrial adoption of robots has been training requirements to operate industrial robots. The disadvantage has been in the thought of requiring employees to train in programming and in interacting with new robotic equipment, eating up time and financial output. Rethink's team claims Baxter units can be retasked in a matter of minutes. "No custom application code is required to get it started. So no costly software or manufacturing engineers are required to program it," according to the company. Baxter is taught via a graphical user interface and through direct manipulation of its robot arms. Nontechnical, hourly workers can train and retrain Baxter right on the line.
As for safety, the designers gave Baxter sensors to detect people within contact distance and trigger the robot to slow to safe operation speeds. If Baxter's power supply were cut, its arms would relax slowly. Employees would have time to move out of the way.
http://www.zeitnews.org/a(...)t-doing-pick-w-video
Rethink Robotics is introducing Baxter to the manufacturing sector with a note: Baxter can ignite a revolution in breaking down costs and safety barriers holding back automation in American manufacturing. The Boston-based company says the $22,000 (list price) robot is a fraction of the cost of traditional industrial robots "with zero integration required." Baxter has been expressly designed to work on assembly lines to perform menial tasks. Baxter has two arms, each with seven degrees of freedom, and a reach similar to that of a human, to take over the mindless menial tasks. It can load, unload, sort, pack, unpack, snap-fit, grind and polish.

What is not at all mindless about Baxter is its design in that, for an industrial robot, Baxter enjoys an incredible lightness of non-being. Baxter has thick, round arms, but they are not heavy. The arm moves in a fluid motion. "When you hold the cuff, the robot goes into gravity-compensation," said Rodney Brooks, the company founder, "zero-force mode," as if the arm is floating. The company offers Baxter with two kinds of grippers to choose from. Electric parallel grippers enable Baxter to pick up objects of varying sizes. Vacuum cup grippers are meant for hard-to-grasp objects, such as smooth, nonporous or relatively flat items.
While Baxter is not the ideal choice for tasks that require an extremely strong or fast industrial robot, Baxter is smart enough to adapt to changes. The robot uses vision to locate and grasp objects, and can be programmed to perform a new task just by holding its arms and moving them to the desired position. The robot can continue to work even after missing a pick-up or dropping a part. It can visually detect parts and adapt to variations in part placement and conveyor speed. If Baxter drops an object, it knows to get another before trying to finish the task.
Another differentiator is that, while Baxter is smart, it does not require a high learning curve. One of the argued barriers to industrial adoption of robots has been training requirements to operate industrial robots. The disadvantage has been in the thought of requiring employees to train in programming and in interacting with new robotic equipment, eating up time and financial output. Rethink's team claims Baxter units can be retasked in a matter of minutes. "No custom application code is required to get it started. So no costly software or manufacturing engineers are required to program it," according to the company. Baxter is taught via a graphical user interface and through direct manipulation of its robot arms. Nontechnical, hourly workers can train and retrain Baxter right on the line.
As for safety, the designers gave Baxter sensors to detect people within contact distance and trigger the robot to slow to safe operation speeds. If Baxter's power supply were cut, its arms would relax slowly. Employees would have time to move out of the way.

http://www.zeitnews.org/a(...)t-doing-pick-w-video
"An educated citizenry is a vital requisite for our survival as a free people."
quote:
Your next assembly lines may have Baxter robot doing pick-up

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

Na dit allemaal te hebben gezien ben ik benieuwd hoeveel mensen geloven dat de tijd snel zal naderen dat wij robots zullen krijgen zoals in de film I ROBOT met Will Smith.
Daarmee indirect aangevend dat het voorbestaan van de mens misschien dan wel wordt bedreigt?
Daarmee indirect aangevend dat het voorbestaan van de mens misschien dan wel wordt bedreigt?
Ik denk het I ROBOT scenario, gevolgd door animatrix (the second renaissance deel 1 & 2), met daar doorheen geweven het Terminator scenario, die uiteindelijk samen overgaan in de Matrix.quote:Op vrijdag 21 september 2012 13:34 schreef Iwanius het volgende:
Na dit allemaal te hebben gezien ben ik benieuwd hoeveel mensen geloven dat de tijd snel zal naderen dat wij robots zullen krijgen zoals in de film I ROBOT met Will Smith.
Daarmee indirect aangevend dat het voorbestaan van de mens misschien dan wel wordt bedreigt?
hmmmm....
Of toch het Wall-e scenario.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Ik denk niet dat het scenario van The Matrix gaat gebeuren. Wat voor een nut zou een superieure AI hebben bij het "bewaren" van mensen?quote:
[..]
Ik denk het I ROBOT scenario, gevolgd door animatrix (the second renaissance deel 1 & 2), met daar doorheen geweven het Terminator scenario, die uiteindelijk samen overgaan in de Matrix.
hmmmm....
Of toch het Wall-e scenario.
Was ook niet serieus. Energie uit mensen is zo inefficient als watquote:
[..]
Ik denk niet dat het scenario van The Matrix gaat gebeuren. Wat voor een nut zou een superieure AI hebben bij het "bewaren" van mensen?
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Inderdaad. Die film was zoveel beter geweest als de machines het deden voor menselijke processorkracht, of uit een rudimentair overblijfsel van de drie wetten van de robotica.quote:
[..]
Was ook niet serieus. Energie uit mensen is zo inefficient als wat
Wat er zou kunnen gebeuren (hoogstens) denk ik is dat robots een soort self-awereness krijgen en mensen gewoon gaan negeren. Dat kan natuurlijk wel uitdraaien op hele nare situaties. Bijvoorbeeld dat robots materialen beginnen te slopen van gebouwen om zelf te gebruiken of mensen gewoon pletten of verwonden tijdens dat ze bezig zijn. Denk niet dat robots express de mens gaat uitroeien.quote:
[..]
Inderdaad. Die film was zoveel beter geweest als de machines het deden voor menselijke processorkracht, of uit een rudimentair overblijfsel van de drie wetten van de robotica.
De kans dat ik een echte opstand als klein zie is omdat robots zich dan samen zouden moeten verenigen als 1 front tegen de mens. Maar op een of andere manier is dit niet logisch. Bij zo'n opstand zouden allerlei menselijke emoties nodig zijn, zoals het gevoel van saamhorigheid, bang zijn voor de dood/uitsterven, wraak, etc...
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

Dafuq, oke dat ding is misschien tergend langzaam (hoelang duurde het hem om 3 tijdschriften recht te leggen?  ) Maar als ik dit ding aan kan zitten als ik naar werk ga ik en ik zie een opgeruimd huis als ik terug dan zeg ik "Shut up and take my money!"
) Maar als ik dit ding aan kan zitten als ik naar werk ga ik en ik zie een opgeruimd huis als ik terug dan zeg ik "Shut up and take my money!"
Zal helaas wel veel programmeer/instel werk vooraf aan gaan.
Edit: nevermind, het gaat om 'teleoperation', dat betekend dat iemand dat ding bestuurd van een afstand lijkt me.
Zal helaas wel veel programmeer/instel werk vooraf aan gaan.
Edit: nevermind, het gaat om 'teleoperation', dat betekend dat iemand dat ding bestuurd van een afstand lijkt me.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Oja, zie het nu ook.quote:
Dafuq, oke dat ding is misschien tergend langzaam (hoelang duurde het hem om 3 tijdschriften recht te leggen?
Zal helaas wel veel programmeer/instel werk vooraf aan gaan.
Edit: nevermind, het gaat om 'teleoperation', dat betekend dat iemand dat ding bestuurd van een afstand lijkt me.
Achja, dan huur je toch gewoon iemand in om dat ding te besturen
Inderdaad, hoeft de schoonmaakster niet eens meer het huis uitquote:
[..]
Oja, zie het nu ook.
Achja, dan huur je toch gewoon iemand in om dat ding te besturen
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
27-09-2012
Gamebot doorstaat turingtest
Een computergestuurde tegenstander overtuigde gamers voor het eerst dat ze tegen een mens aan het spelen waren. Daarmee slaagde dit staaltje kunstmatige intelligentie met vlag en wimpel voor de turingtest.
Tijdens een potje Unreal Tournament 2004, waarin gamers het tegen elkaar opnemen, beoordeelden medespelers dat een virtuele, kunstmatige intelligente speler wel menselijk moest zijn.
De bot, UT^2 genaamd, werd gemaakt door computerwetenschappers aan de universiteit van Texas. UT^2 nam deel aan een spel waarin spelers het tegen elkaar opnemen in een zogenaamde first-person shooter. De helft van de deelnemers was virtueel, de helft mens. Het was aan de menselijke spelers om tijdens het spelen hun tegenstanders te beoordelen op menselijkheid. Daarvoor werden de spelpersonages uitgerust met een ‘beoordelingsgeweer’, waarmee tegenstanders konden worden gemerkt als bot of mens. UT^2 kreeg van 52 procent van de gamers het oordeel menselijk te zijn. Daartegenover kregen menselijke spelers gemiddeld een score van slechts 40 procent.
Daarmee slaagde UT^2 als eerste bot voor de beroemde turingtest. Deze test geldt als een maatstaf voor het menselijk overkomen van machines. De test is vernoemd naar de wiskundige Alan Turing. Hij stelde dat echte kunstmatige intelligentie kan worden bewezen als een machine proefpersonen overtuigt dat ze een mens tegenover zich hebben.
Om dit te bereiken, gaven de makers van UT^2 hun bot irrationeel, maar menselijk gedrag mee. Zo kon de bot de pik krijgen op een speler die hem steeds dwarsboomde, waardoor hij meer aandacht aan die persoon besteedde dan gunstig was. Ook verslechterde de nauwkeurigheid van zijn schoten wanneer de virtuele speler aan het rennen was of op een chaotische plek terecht kwam.
De onderzoekers zien veel toepassingen voor intelligente bots in de toekomst. Zo zullen niet alleen spelletjes spannender worden, het kan ook worden gebruikt in robots die met mensen zullen werken.
Ans Hekkenberg
(nwtonline.nl)
Gamebot doorstaat turingtest

Een computergestuurde tegenstander overtuigde gamers voor het eerst dat ze tegen een mens aan het spelen waren. Daarmee slaagde dit staaltje kunstmatige intelligentie met vlag en wimpel voor de turingtest.
Tijdens een potje Unreal Tournament 2004, waarin gamers het tegen elkaar opnemen, beoordeelden medespelers dat een virtuele, kunstmatige intelligente speler wel menselijk moest zijn.
De bot, UT^2 genaamd, werd gemaakt door computerwetenschappers aan de universiteit van Texas. UT^2 nam deel aan een spel waarin spelers het tegen elkaar opnemen in een zogenaamde first-person shooter. De helft van de deelnemers was virtueel, de helft mens. Het was aan de menselijke spelers om tijdens het spelen hun tegenstanders te beoordelen op menselijkheid. Daarvoor werden de spelpersonages uitgerust met een ‘beoordelingsgeweer’, waarmee tegenstanders konden worden gemerkt als bot of mens. UT^2 kreeg van 52 procent van de gamers het oordeel menselijk te zijn. Daartegenover kregen menselijke spelers gemiddeld een score van slechts 40 procent.
Daarmee slaagde UT^2 als eerste bot voor de beroemde turingtest. Deze test geldt als een maatstaf voor het menselijk overkomen van machines. De test is vernoemd naar de wiskundige Alan Turing. Hij stelde dat echte kunstmatige intelligentie kan worden bewezen als een machine proefpersonen overtuigt dat ze een mens tegenover zich hebben.
Om dit te bereiken, gaven de makers van UT^2 hun bot irrationeel, maar menselijk gedrag mee. Zo kon de bot de pik krijgen op een speler die hem steeds dwarsboomde, waardoor hij meer aandacht aan die persoon besteedde dan gunstig was. Ook verslechterde de nauwkeurigheid van zijn schoten wanneer de virtuele speler aan het rennen was of op een chaotische plek terecht kwam.
De onderzoekers zien veel toepassingen voor intelligente bots in de toekomst. Zo zullen niet alleen spelletjes spannender worden, het kan ook worden gebruikt in robots die met mensen zullen werken.
Ans Hekkenberg
(nwtonline.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
28-09-2012
Nieuwe robot moet Franse wijnboeren helpen
© afp.
In Frankrijk is een nieuwe robot onthuld die ontworpen is om wijngaarden te onderhouden. Het apparaat heeft zes camera's en twee armen. Dat meldt de BBC.
Kunstmatige intelligentie, opsporingstechnieken en digitale kaarten maken het mogelijk dat de robot zich van wijnrank naar wijnrank kan verplaatsen. De wijnranken worden van top tot teen gecontroleerd. Met zijn camera's herkent de robot de planten en onthoudt deze. Als het nodig is worden de takken gesnoeid.
Een laatste handige eigenschap van de robot is dat hij zijn eigenaar kan voorzien van waardevolle informatie over de kwaliteit van de aarde, de druiven en de rank. De robot kan zo'n 600 wijnranken per dag controleren en snoeien.
(HLN)
Nieuwe robot moet Franse wijnboeren helpen

© afp.
In Frankrijk is een nieuwe robot onthuld die ontworpen is om wijngaarden te onderhouden. Het apparaat heeft zes camera's en twee armen. Dat meldt de BBC.
Kunstmatige intelligentie, opsporingstechnieken en digitale kaarten maken het mogelijk dat de robot zich van wijnrank naar wijnrank kan verplaatsen. De wijnranken worden van top tot teen gecontroleerd. Met zijn camera's herkent de robot de planten en onthoudt deze. Als het nodig is worden de takken gesnoeid.
Een laatste handige eigenschap van de robot is dat hij zijn eigenaar kan voorzien van waardevolle informatie over de kwaliteit van de aarde, de druiven en de rank. De robot kan zo'n 600 wijnranken per dag controleren en snoeien.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Interessant! Even een filmpje erbij gezochtquote:
28-09-2012
Nieuwe robot moet Franse wijnboeren helpen

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
quote:
[..]
Interessant! Even een filmpje erbij gezocht
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
02-10-2012
Robocops: ze komen er nu echt aan!
Wetenschappers van de universiteit van Florida werken aan een heuse robocop. Ze bouwen daarvoor een robot die oorspronkelijk voor defensieve doeleinden werd gebouwd, om. Het is de bedoeling dat de robocops onder meer gaan surveilleren.
U zult misschien denken: dat gaat weer banen kosten. Maar dat is niet het geval. Het is de bedoeling dat de robots juist banen gaan opleveren. Het idee om robocops te bouwen, komt van Jeremy Robins. Hij betreurt het dat politieagenten en militairen die door geweld of een ongeluk gehandicapt raken niet meer in staat zijn om te doen wat ze het liefste doen: de samenleving dienen. Om deze groep mensen toch weer die rol te laten vervullen, bedacht hij dat een robocop ideaal zou zijn. De robocop is welbeschouwd een telerobot: de robot wordt van een afstandje door echte politieagenten bestuurd en dat is een schone taak voor mensen die tegen wil en dank niet meer in staat zijn om zelf politiewerk te doen. “Met telerobots kan een gehandicapte politieagent veel – misschien zelfs alle – functies van een normale agent uitvoeren: contacten met de samenleving, patrouilleren, reageren op noodoproepen,” somt Robins op.
Over telerobotica Telerobotica is niet nieuw: het wordt al in tal van velden toegepast. “Telerobotica heeft zijn weg al gevonden in de wereld van de geneeskunde, zakenwereld en het leger,” vertelt Robins. Hij vindt het dan ook een logische vervolgstap om telerobotica ook bij het handhaven van de wet in te zetten.
Lenen
Zelf is Robins niet in staat om zo’n robot te bouwen en dus nam hij zijn toevlucht tot het Discovery Lab van Florida International University. In het lab waren ze enthousiast over het idee. En gelukkig hoefden ze niet met niets te beginnen. Ze kregen twee robots die voor defensieve doeleinden waren gebouwd te leen en mogen deze om gaan bouwen tot robocops.
Lastig
Het bouwen van zo’n robocop is zo gemakkelijk nog niet. “We willen iets bouwen dat zo kan worden ingezet dat mensen het echt kunnen gebruiken,” vertelt professor Nagarajan Prabakar. “En we willen er zeker van zijn dat politiekorpsen zich zo’n robot kunnen veroorloven.” De robocops moeten zich goed kunnen bewegen, wendbaar zijn en kunnen communiceren. Al met al nog een hele klus. Maar de onderzoekers deinzen daar niet voor terug. “We gebruiken technologie om een persoon in staat te stellen een baan die ze anders niet zouden kunnen uitvoeren of die ze anders niet mogen uitvoeren, te doen. Deze mensen gingen bij de politie en het leger om hun land te dienen en nu kunnen ze dat vanwege een blessure niet meer zo goed. Ik weet niet hoe ik een aangetaste wervelkolom moet repareren, maar ze weer in staat stellen om te dienen en de wet weer te handhaven: dat denk ik dat we wel kunnen regelen.”
De onderzoekers werken nu hard aan een prototype. Een eerste schets ziet u bovenaan. Het is onduidelijk wanneer het eerste prototype klaar is, maar dankzij het verkrijgen van de twee robots heeft het lab alvast een vliegende start gemaakt.
(Scientias.nl)
Robocops: ze komen er nu echt aan!

Wetenschappers van de universiteit van Florida werken aan een heuse robocop. Ze bouwen daarvoor een robot die oorspronkelijk voor defensieve doeleinden werd gebouwd, om. Het is de bedoeling dat de robocops onder meer gaan surveilleren.
U zult misschien denken: dat gaat weer banen kosten. Maar dat is niet het geval. Het is de bedoeling dat de robots juist banen gaan opleveren. Het idee om robocops te bouwen, komt van Jeremy Robins. Hij betreurt het dat politieagenten en militairen die door geweld of een ongeluk gehandicapt raken niet meer in staat zijn om te doen wat ze het liefste doen: de samenleving dienen. Om deze groep mensen toch weer die rol te laten vervullen, bedacht hij dat een robocop ideaal zou zijn. De robocop is welbeschouwd een telerobot: de robot wordt van een afstandje door echte politieagenten bestuurd en dat is een schone taak voor mensen die tegen wil en dank niet meer in staat zijn om zelf politiewerk te doen. “Met telerobots kan een gehandicapte politieagent veel – misschien zelfs alle – functies van een normale agent uitvoeren: contacten met de samenleving, patrouilleren, reageren op noodoproepen,” somt Robins op.
Over telerobotica Telerobotica is niet nieuw: het wordt al in tal van velden toegepast. “Telerobotica heeft zijn weg al gevonden in de wereld van de geneeskunde, zakenwereld en het leger,” vertelt Robins. Hij vindt het dan ook een logische vervolgstap om telerobotica ook bij het handhaven van de wet in te zetten.
Lenen
Zelf is Robins niet in staat om zo’n robot te bouwen en dus nam hij zijn toevlucht tot het Discovery Lab van Florida International University. In het lab waren ze enthousiast over het idee. En gelukkig hoefden ze niet met niets te beginnen. Ze kregen twee robots die voor defensieve doeleinden waren gebouwd te leen en mogen deze om gaan bouwen tot robocops.
Lastig
Het bouwen van zo’n robocop is zo gemakkelijk nog niet. “We willen iets bouwen dat zo kan worden ingezet dat mensen het echt kunnen gebruiken,” vertelt professor Nagarajan Prabakar. “En we willen er zeker van zijn dat politiekorpsen zich zo’n robot kunnen veroorloven.” De robocops moeten zich goed kunnen bewegen, wendbaar zijn en kunnen communiceren. Al met al nog een hele klus. Maar de onderzoekers deinzen daar niet voor terug. “We gebruiken technologie om een persoon in staat te stellen een baan die ze anders niet zouden kunnen uitvoeren of die ze anders niet mogen uitvoeren, te doen. Deze mensen gingen bij de politie en het leger om hun land te dienen en nu kunnen ze dat vanwege een blessure niet meer zo goed. Ik weet niet hoe ik een aangetaste wervelkolom moet repareren, maar ze weer in staat stellen om te dienen en de wet weer te handhaven: dat denk ik dat we wel kunnen regelen.”
De onderzoekers werken nu hard aan een prototype. Een eerste schets ziet u bovenaan. Het is onduidelijk wanneer het eerste prototype klaar is, maar dankzij het verkrijgen van de twee robots heeft het lab alvast een vliegende start gemaakt.
(Scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Lol,
Ik denk eerder 'eerst zien dan geloven'. Aangezien ik voorlopig nog steeds niet een robot als beveiliger zie rondlopen...quote:U zult misschien denken: dat gaat weer banen kosten
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

03-10-2012
Zelfvliegende robot moet kunnen 'voelen'
Wetenschappers gaan het brein van honingbijen simuleren en de kunstmatige versie vervolgens verwerken in een vliegende robot die volledig zelfstandig moet kunnen bewegen.
Dat melden diverse buitenlandse media. De universiteiten van Sheffield en Sussex werken samen aan het project waarvoor zij omgerekend 1,25 miljoen euro subsidie hebben gekregen.
De wetenschappers willen in 2015 een zelfvliegende robot gemaakt hebben. De grootste uitdaging is de ontwikkeling van een gesimuleerd brein. De hersenen van bijen zijn volgens de onderzoekers bijzonder interessant.
.Bijen kunnen bijvoorbeeld hun weg terug naar de kolonie vinden. Ze gebruiken daarvoor waarschijnlijk de zon als oriëntatiepunt en berekenen de beweging van de zon om hun thuis terug te vinden.
De ontwikkeling van een dergelijke robot kan helpen bij reddingsmissies en het automatisch bestuiven van gewassen.
Chips
"Omdat het brein van een honingbij een stuk kleiner en toegankelijker is dan dat van gewervelde dieren, hopen we dat we uiteindelijk een accuraat en compleet model kunnen maken en dit kunnen testen in een vliegende robot", aldus één van de onderzoekers tegenover de BBC.
Het kunstmatige brein draait op krachtige grafische chips die geleverd zullen worden door Nvidia. Uiteindelijk hopen de wetenschappers dat de vliegende robot beslissingen zal nemen op basis van wat het 'voelt' in plaats van op basis van voorgeprogrammeerde taken zoals nu bij robots het geval is.
Door: NU.nl/Colin van Hoek .
(nu.nl)
Zelfvliegende robot moet kunnen 'voelen'
Wetenschappers gaan het brein van honingbijen simuleren en de kunstmatige versie vervolgens verwerken in een vliegende robot die volledig zelfstandig moet kunnen bewegen.

Dat melden diverse buitenlandse media. De universiteiten van Sheffield en Sussex werken samen aan het project waarvoor zij omgerekend 1,25 miljoen euro subsidie hebben gekregen.
De wetenschappers willen in 2015 een zelfvliegende robot gemaakt hebben. De grootste uitdaging is de ontwikkeling van een gesimuleerd brein. De hersenen van bijen zijn volgens de onderzoekers bijzonder interessant.
.Bijen kunnen bijvoorbeeld hun weg terug naar de kolonie vinden. Ze gebruiken daarvoor waarschijnlijk de zon als oriëntatiepunt en berekenen de beweging van de zon om hun thuis terug te vinden.
De ontwikkeling van een dergelijke robot kan helpen bij reddingsmissies en het automatisch bestuiven van gewassen.
Chips
"Omdat het brein van een honingbij een stuk kleiner en toegankelijker is dan dat van gewervelde dieren, hopen we dat we uiteindelijk een accuraat en compleet model kunnen maken en dit kunnen testen in een vliegende robot", aldus één van de onderzoekers tegenover de BBC.
Het kunstmatige brein draait op krachtige grafische chips die geleverd zullen worden door Nvidia. Uiteindelijk hopen de wetenschappers dat de vliegende robot beslissingen zal nemen op basis van wat het 'voelt' in plaats van op basis van voorgeprogrammeerde taken zoals nu bij robots het geval is.
Door: NU.nl/Colin van Hoek .
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
10-10-2012
Robot Polaris moet naar water boren op maan
© reuters.
Voormalige medewerkers van de Carnegie Mellon-universiteit werken met hun spin-off Astrobotic Technology Inc. aan een robotvoertuig dat op de maan naar water moet gaan zoeken. Een prototype is inmiddels klaar voor verdere ontwikkeling, meldt Tweakers.net.
De maanrobot Polaris van het ruimtetechnologiebedrijf moet op termijn naar de maan worden gestuurd om daar rond de polen op zoek gaan naar waterijs. Dat moet toekomstige maanmissies een stuk aantrekkelijker maken, aangezien van het water raketbrandstof gemaakt zou kunnen worden waarmee maanlanders terug naar de Aarde kunnen vliegen. Ook zou water voor een bemande basis welkom zijn als drinkwater en als zuurstofbron.
Prototype
Polaris verkeert nog in het prototypestadium, en werd ontwikkeld om op Aarde de hard- en vooral software te testen. Het prototype van ongeveer 1,7 meter hoog, 2,4 meter breed en 2,6 meter lang weegt 150 kilo. De robot moet zelfstandig navigeren en is daartoe uitgerust met visuele navigatiehulpmiddelen en software; de plaatsbepaling op de maan moet tot op enkele meters nauwkeurig worden. Om daadwerkelijk naar waterijs te zoeken is Polaris uitgerust met een boor om een meter diep te delven.
Lancering
De maanrobot moet op termijn met een Falcon 9-raket van SpaceX gelanceerd worden, en zou dan op de noordpool van de maan zijn werk moeten doen. Omdat de zon daar zeer laag staat, heeft Polaris drie zonnepanelen die verticaal gepositioneerd zijn. Daarmee zou 250W gegenereerd kunnen worden. Gedurende tien dagen van de veertien dagen durende maandagen zou Polaris tientallen gaten moeten boren.
(HLN)
Robot Polaris moet naar water boren op maan

© reuters.
Voormalige medewerkers van de Carnegie Mellon-universiteit werken met hun spin-off Astrobotic Technology Inc. aan een robotvoertuig dat op de maan naar water moet gaan zoeken. Een prototype is inmiddels klaar voor verdere ontwikkeling, meldt Tweakers.net.
De maanrobot Polaris van het ruimtetechnologiebedrijf moet op termijn naar de maan worden gestuurd om daar rond de polen op zoek gaan naar waterijs. Dat moet toekomstige maanmissies een stuk aantrekkelijker maken, aangezien van het water raketbrandstof gemaakt zou kunnen worden waarmee maanlanders terug naar de Aarde kunnen vliegen. Ook zou water voor een bemande basis welkom zijn als drinkwater en als zuurstofbron.
Prototype
Polaris verkeert nog in het prototypestadium, en werd ontwikkeld om op Aarde de hard- en vooral software te testen. Het prototype van ongeveer 1,7 meter hoog, 2,4 meter breed en 2,6 meter lang weegt 150 kilo. De robot moet zelfstandig navigeren en is daartoe uitgerust met visuele navigatiehulpmiddelen en software; de plaatsbepaling op de maan moet tot op enkele meters nauwkeurig worden. Om daadwerkelijk naar waterijs te zoeken is Polaris uitgerust met een boor om een meter diep te delven.
Lancering
De maanrobot moet op termijn met een Falcon 9-raket van SpaceX gelanceerd worden, en zou dan op de noordpool van de maan zijn werk moeten doen. Omdat de zon daar zeer laag staat, heeft Polaris drie zonnepanelen die verticaal gepositioneerd zijn. Daarmee zou 250W gegenereerd kunnen worden. Gedurende tien dagen van de veertien dagen durende maandagen zou Polaris tientallen gaten moeten boren.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Een geweldige foto serie van The Atlantic:
http://www.theatlantic.co(...)ork-and-play/100389/
Een paar van de foto's:
En dit vind ik ook mooi, hoe het steeds makkelijker wordt om zelf robots te bouwen aangezien soft-ware vaak opensource is en op internet beland, en onderdelen steeds goedkoper worden. Deze robot kan zelf banden oppompen.
http://www.theatlantic.co(...)ork-and-play/100389/
Een paar van de foto's:



En dit vind ik ook mooi, hoe het steeds makkelijker wordt om zelf robots te bouwen aangezien soft-ware vaak opensource is en op internet beland, en onderdelen steeds goedkoper worden. Deze robot kan zelf banden oppompen.

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

"An educated citizenry is a vital requisite for our survival as a free people."
Petman heeft een upgrade gekregen en kan nu ook springen en klimmen. Best ziek...

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Mooie tijden om in te leven. We maken echt het begin mee van een nieuw tijdperkquote:
Petman heeft een upgrade gekregen en kan nu ook springen en klimmen. Best ziek...
"An educated citizenry is a vital requisite for our survival as a free people."
01-11-2012
Zin in een salade? Deze robot maakt ‘m graag voor u!
Zin in een salade, maar geen zin om ‘m te maken? De robotica schiet te hulp! Zuid-Koreaanse wetenschappers presenteren een robot die prima in staat is om op eigen houtje een salade te bereiden. U moet alleen wel even geduld hebben…
Een salade maken: daar draait robot CIROS zijn hand niet voor om. De robot is speciaal ontwikkeld voor een plekje in het huishouden en kan naast salades maken ook uw drankjes bijvullen, objecten verplaatsen (opruimen), de tafel dekken en afruimen.
Om dat allemaal te bewerkstelligen, is de robot onder meer uitgerust met verschillende camera’s en sensoren. Ook kan hij obstakels vermijden en objecten en bepaalde woorden herkennen. De Zuid-Koreanen ontwikkelden de eerste versie van de robot in 2005, maar bleven er voortdurend aan sleutelen. Dit is alweer de derde versie van de robot.
En in een filmpje bewijst de robot nu wat ‘ie waard is. Te zien is hoe de robot een komkommer snijdt en de dressing aanbrengt. Uiteindelijk levert dat een mooie salade op. U moet wel even geduld hebben: heel snel is CIROS namelijk nog niet.
(scientias.nl)
Zin in een salade? Deze robot maakt ‘m graag voor u!

Zin in een salade, maar geen zin om ‘m te maken? De robotica schiet te hulp! Zuid-Koreaanse wetenschappers presenteren een robot die prima in staat is om op eigen houtje een salade te bereiden. U moet alleen wel even geduld hebben…
Een salade maken: daar draait robot CIROS zijn hand niet voor om. De robot is speciaal ontwikkeld voor een plekje in het huishouden en kan naast salades maken ook uw drankjes bijvullen, objecten verplaatsen (opruimen), de tafel dekken en afruimen.
Om dat allemaal te bewerkstelligen, is de robot onder meer uitgerust met verschillende camera’s en sensoren. Ook kan hij obstakels vermijden en objecten en bepaalde woorden herkennen. De Zuid-Koreanen ontwikkelden de eerste versie van de robot in 2005, maar bleven er voortdurend aan sleutelen. Dit is alweer de derde versie van de robot.
En in een filmpje bewijst de robot nu wat ‘ie waard is. Te zien is hoe de robot een komkommer snijdt en de dressing aanbrengt. Uiteindelijk levert dat een mooie salade op. U moet wel even geduld hebben: heel snel is CIROS namelijk nog niet.

(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
09-11-2012
Nederlandse robot leert zichzelf lopen
Wetenschappers van de TU Delft hebben een robot ontwikkeld die zichzelf kan leren lopen en zichzelf binnen een kwartiertje aanleerde om trappen te lopen.
Robots: ze zijn er al in allerlei vorm en maten en met allerlei functionaliteiten. Maar in het dagelijks leven willen ze maar niet echt doorbreken. Zo hebben we de door sommige visionairs voorspelde robots die ons helpen in het huishouden nog steeds niet. Eén van de redenen daarvan is dat robots moeite hebben om zich aan te passen. Een robot kan geprogrammeerd worden om bepaalde dingen te doen. Bijvoorbeeld naar de keuken lopen om een glas op te ruimen. Maar in een gezin valt zo’n simpele taak nog niet mee. De omgeving is weer heel anders dan het lab, er rennen kinderen rond, moeder schuift regelmatig met de meubels en vader laat zijn schoenen overal slingeren. Hoe kan een robot zich in zo’n veranderende omgeving overeind houden als hij niet in staat is om te leren?
Simulaties
Veel onderzoekers zijn er dan ook van overtuigd dat robots eerst in staat moeten zijn om zichzelf nieuwe dingen aan te leren en daarna pas een kans maken op een plekje in de maatschappij. Er wordt al veel geëxperimenteerd met dat idee, maar vaak gebruiken wetenschappers daarvoor simulaties. Onderzoeker Erik Schuitema tilt zijn onderzoek naar lerende robots direct naar een hoger plan door niet met simulaties, maar met een echte robot te werken. En daar heeft hij een goede reden voor, zo vertelt hij: “Er is nog weinig bekend over de aansluiting met echte, daadwerkelijke hardware.”
Leo
En dus ontwikkelde Schuitema samen met zijn collega’s robot Leo. “We hebben een tweevoetige, lopende robot, genaamd Leo, speciaal ontworpen en gebouwd om onderzoek te doen naar het toepassen van Reinforcement Learning (leren door middel van beloningen, red.) op echte robots. Robot Leo is in staat om twee motorische basistaken te leren: het plaatsen van een voet op een traptrede, en lopen.”
Beloning
Om de robot in staat te stellen zichzelf te leren lopen, maken de onderzoekers dus gebruik van Reinforcement Learning. Goed gedrag wordt beloond, slecht gedrag wordt bestraft. Maar hoe beloont u een robot? Met hoge cijfers. Als Leo zijn voet correct beweegt, krijgt hij een hoog cijfer. Doet hij het niet goed, dan krijgt hij een laag cijfer. De robot is zo geprogrammeerd dat deze voor hoge cijfers gaat. Als hij een laag cijfer scoort, gaat hij zijn acties bijsturen of iets anders proberen om toch maar een hoog cijfer te krijgen.
Leren lopen
De aanpak van de wetenschappers bleek effectief te zijn. Binnen een kwartiertje leerde Leo zichzelf om trap te lopen. Leren lopen kostte de robot wat meer tijd. Probleem was dat Leo duizenden keren viel en de hardware niet bestand was tegen al die klappen. Om te voorkomen dat Leo het zou begeven, hielpen de onderzoekers ‘m een klein beetje. Hij mocht de kunst afkijken van lopende robots die handmatig waren geprogrammeerd. Binnen een aantal uur kon Leo ze al nadoen en hun tred zelfs verbeteren.
Het kan wel
Hoewel Leo in de experimenten een beetje vals heeft gespeeld, kan hij zichzelf echt leren lopen, zolang de hardware maar bestand is tegen vallen, zo benadrukt Schuitema. Simulaties wijzen erop dat het de robot dan zo’n vijf uur zou kosten om het lopen onder de knie te krijgen.
Maakt dit de weg dan vrij voor robots in het dagelijks leven? Het is (letterlijk) een stap in de goede richting, maar we zijn er nog niet. “Het kan nog wel decennia duren voordat dit soort robots in de praktijk aan de slag kunnen.
(scientias.nl)
[ Bericht 0% gewijzigd door ExperimentalFrentalMental op 09-11-2012 10:14:32 ]
Nederlandse robot leert zichzelf lopen

Wetenschappers van de TU Delft hebben een robot ontwikkeld die zichzelf kan leren lopen en zichzelf binnen een kwartiertje aanleerde om trappen te lopen.
Robots: ze zijn er al in allerlei vorm en maten en met allerlei functionaliteiten. Maar in het dagelijks leven willen ze maar niet echt doorbreken. Zo hebben we de door sommige visionairs voorspelde robots die ons helpen in het huishouden nog steeds niet. Eén van de redenen daarvan is dat robots moeite hebben om zich aan te passen. Een robot kan geprogrammeerd worden om bepaalde dingen te doen. Bijvoorbeeld naar de keuken lopen om een glas op te ruimen. Maar in een gezin valt zo’n simpele taak nog niet mee. De omgeving is weer heel anders dan het lab, er rennen kinderen rond, moeder schuift regelmatig met de meubels en vader laat zijn schoenen overal slingeren. Hoe kan een robot zich in zo’n veranderende omgeving overeind houden als hij niet in staat is om te leren?
Simulaties
Veel onderzoekers zijn er dan ook van overtuigd dat robots eerst in staat moeten zijn om zichzelf nieuwe dingen aan te leren en daarna pas een kans maken op een plekje in de maatschappij. Er wordt al veel geëxperimenteerd met dat idee, maar vaak gebruiken wetenschappers daarvoor simulaties. Onderzoeker Erik Schuitema tilt zijn onderzoek naar lerende robots direct naar een hoger plan door niet met simulaties, maar met een echte robot te werken. En daar heeft hij een goede reden voor, zo vertelt hij: “Er is nog weinig bekend over de aansluiting met echte, daadwerkelijke hardware.”

Leo
En dus ontwikkelde Schuitema samen met zijn collega’s robot Leo. “We hebben een tweevoetige, lopende robot, genaamd Leo, speciaal ontworpen en gebouwd om onderzoek te doen naar het toepassen van Reinforcement Learning (leren door middel van beloningen, red.) op echte robots. Robot Leo is in staat om twee motorische basistaken te leren: het plaatsen van een voet op een traptrede, en lopen.”
Beloning
Om de robot in staat te stellen zichzelf te leren lopen, maken de onderzoekers dus gebruik van Reinforcement Learning. Goed gedrag wordt beloond, slecht gedrag wordt bestraft. Maar hoe beloont u een robot? Met hoge cijfers. Als Leo zijn voet correct beweegt, krijgt hij een hoog cijfer. Doet hij het niet goed, dan krijgt hij een laag cijfer. De robot is zo geprogrammeerd dat deze voor hoge cijfers gaat. Als hij een laag cijfer scoort, gaat hij zijn acties bijsturen of iets anders proberen om toch maar een hoog cijfer te krijgen.
Leren lopen
De aanpak van de wetenschappers bleek effectief te zijn. Binnen een kwartiertje leerde Leo zichzelf om trap te lopen. Leren lopen kostte de robot wat meer tijd. Probleem was dat Leo duizenden keren viel en de hardware niet bestand was tegen al die klappen. Om te voorkomen dat Leo het zou begeven, hielpen de onderzoekers ‘m een klein beetje. Hij mocht de kunst afkijken van lopende robots die handmatig waren geprogrammeerd. Binnen een aantal uur kon Leo ze al nadoen en hun tred zelfs verbeteren.

Het kan wel
Hoewel Leo in de experimenten een beetje vals heeft gespeeld, kan hij zichzelf echt leren lopen, zolang de hardware maar bestand is tegen vallen, zo benadrukt Schuitema. Simulaties wijzen erop dat het de robot dan zo’n vijf uur zou kosten om het lopen onder de knie te krijgen.
Maakt dit de weg dan vrij voor robots in het dagelijks leven? Het is (letterlijk) een stap in de goede richting, maar we zijn er nog niet. “Het kan nog wel decennia duren voordat dit soort robots in de praktijk aan de slag kunnen.
(scientias.nl)
[ Bericht 0% gewijzigd door ExperimentalFrentalMental op 09-11-2012 10:14:32 ]
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
13-11-2012
Robots zijn de toekomst in China
© ap.
De snelst groeiende markt voor robots bevindt zich in China, meldt Gudrun Litzenberger, secretaris-generaal van de Internationale Federatie voor Robots. Ze verwacht dat de vraag er tegen 2014 zal stijgen tot 32.000 eenheden en China daarmee wereldwijd de grootste gebruiker van robots wordt.
Dat de programmeerbare machines populair zijn in China en voor vele doeleinden kunnen worden ingezet, was vorige week duidelijk op de International Industry Fair in Shanghai. Robots die letterlijk de degens kruisten, pingpong speelden of zich aan een dansje waagden, was geen ongewoon zicht op de internationale beurs.
Waarom robots?
Industriële robots zijn energie-efficient en kunnen complexe taken uitvoeren waarvoor zelfs de best getrainde werknemers zich in de haren krabben. Maar een gewijzigde demografie en economische factoren blijven de belangrijkste redenen voor China's stijgende vraag naar robots. Moraal van het verhaal: de beroepsbevolking krimpt waardoor de arbeidskosten toenemen.
"Chinese fabrieken hebben het steeds moeilijker om getraind personeel te vinden. Het is dan ook begrijpelijk dat zij inzetten op de automatisering van de productie," meldt Geoff Crothall, woordvoerder van China Labor Bulletin, een ngo die Chinese arbeidsrechten promoot en verdedigt.
Op zoek naar beter betaalde job
De eenkindpolitiek en verbeterde gezondheidszorg zijn eveneens van invloed op de Chinese werkvloer. De jongere generatie moet meer verdienen om hun langer levende ouders te kunnen onderhouden, waardoor zij ervoor kiezen om langer school te lopen en zo hun kansen op een beter betaalde job te verhogen.
Robots kunnen de werkplekken invullen die jongeren de rug toekeren, bericht de Britse nieuwssite The Guardian.
(Lees hieronder verder)
Het bedrijf Foxconn, dat onder meer de Mac Mini en de iPhone produceert, heeft momenteel 10.000 robots in gebruik en wil dat aantal de komende drie jaar uitbreiden tot een miljoen stuks. Lassen, spuiten en assembleren zullen volgens CEO Terry Gou tot hun takenpakket behoren.
Modernisering noodzakelijk
Chinese autoriteiten bejubelen intussen de groei van de sector. "Robotica is een van onze belangrijkste industrieën", liet de lokale overheid van Shanghai eerder verstaan in de Chinese krant China Daily. Volgens Yang Zhiming, viceminister van het Ministry of Human Resources and Social Security, moet blijven worden ingezet op de modernisering van de apparatuur en technologie.
Robots duiken niet alleen op in Chinese fabrieken. In 2009 verwierf de Chinese landbouwer Wu Yulu bekendheid omdat hij robots gebruikte om riksja's voort te trekken en sigaretten van bezoekers aan te steken. In de kustprovincie Shangdong opende twee jaar geleden een restaurant met entertainende robots in heuse 'Star Wars'-stijl en afgelopen maart lanceerde een andere restauranthouder robots om noedels te snijden.
Meer robots in de toekomst
"Jonge mensen zijn minder bereid om vuil en vermoeiend werk uit te voeren. We maken gewoon gebruik van de voorhanden technologie", aldus restaurantuitbater Cui Runguan. Hij verwacht bovendien dat "veel meer machines" menselijke arbeid zullen vervangen in de toekomst.
(HLN)
Robots zijn de toekomst in China

© ap.
De snelst groeiende markt voor robots bevindt zich in China, meldt Gudrun Litzenberger, secretaris-generaal van de Internationale Federatie voor Robots. Ze verwacht dat de vraag er tegen 2014 zal stijgen tot 32.000 eenheden en China daarmee wereldwijd de grootste gebruiker van robots wordt.
Dat de programmeerbare machines populair zijn in China en voor vele doeleinden kunnen worden ingezet, was vorige week duidelijk op de International Industry Fair in Shanghai. Robots die letterlijk de degens kruisten, pingpong speelden of zich aan een dansje waagden, was geen ongewoon zicht op de internationale beurs.
Waarom robots?
Industriële robots zijn energie-efficient en kunnen complexe taken uitvoeren waarvoor zelfs de best getrainde werknemers zich in de haren krabben. Maar een gewijzigde demografie en economische factoren blijven de belangrijkste redenen voor China's stijgende vraag naar robots. Moraal van het verhaal: de beroepsbevolking krimpt waardoor de arbeidskosten toenemen.
"Chinese fabrieken hebben het steeds moeilijker om getraind personeel te vinden. Het is dan ook begrijpelijk dat zij inzetten op de automatisering van de productie," meldt Geoff Crothall, woordvoerder van China Labor Bulletin, een ngo die Chinese arbeidsrechten promoot en verdedigt.
Op zoek naar beter betaalde job
De eenkindpolitiek en verbeterde gezondheidszorg zijn eveneens van invloed op de Chinese werkvloer. De jongere generatie moet meer verdienen om hun langer levende ouders te kunnen onderhouden, waardoor zij ervoor kiezen om langer school te lopen en zo hun kansen op een beter betaalde job te verhogen.
Robots kunnen de werkplekken invullen die jongeren de rug toekeren, bericht de Britse nieuwssite The Guardian.
(Lees hieronder verder)

Het bedrijf Foxconn, dat onder meer de Mac Mini en de iPhone produceert, heeft momenteel 10.000 robots in gebruik en wil dat aantal de komende drie jaar uitbreiden tot een miljoen stuks. Lassen, spuiten en assembleren zullen volgens CEO Terry Gou tot hun takenpakket behoren.
Modernisering noodzakelijk
Chinese autoriteiten bejubelen intussen de groei van de sector. "Robotica is een van onze belangrijkste industrieën", liet de lokale overheid van Shanghai eerder verstaan in de Chinese krant China Daily. Volgens Yang Zhiming, viceminister van het Ministry of Human Resources and Social Security, moet blijven worden ingezet op de modernisering van de apparatuur en technologie.
Robots duiken niet alleen op in Chinese fabrieken. In 2009 verwierf de Chinese landbouwer Wu Yulu bekendheid omdat hij robots gebruikte om riksja's voort te trekken en sigaretten van bezoekers aan te steken. In de kustprovincie Shangdong opende twee jaar geleden een restaurant met entertainende robots in heuse 'Star Wars'-stijl en afgelopen maart lanceerde een andere restauranthouder robots om noedels te snijden.
Meer robots in de toekomst
"Jonge mensen zijn minder bereid om vuil en vermoeiend werk uit te voeren. We maken gewoon gebruik van de voorhanden technologie", aldus restaurantuitbater Cui Runguan. Hij verwacht bovendien dat "veel meer machines" menselijke arbeid zullen vervangen in de toekomst.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Erg interessant. Ik ben benieuwd of en wanneer ze Japan gaan overtreffen in research hierin.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Nice! De manier waarop je een robot kunt programmeren wordt hier ontzettend simpel gemaakt
Enabling End-Users to Program New Robot Skills
Mobile manipulators like the PR2 have the physical capability to do a range of useful tasks for humans, however their actual capabilities are limited by the software applications written by highly specialized programmers. Instead, Maya Cakmak from Georgia Tech, envisions robots that can be programmed by their end-users for their own specific needs. This past summer, Maya worked on developing a spoken dialog interface that allows a user to program new skills by physically moving PR2’s two arms and using simple speech commands.
Imagine purchasing a brand new “programmable” robot. How would you know what to do, to make the robot do something? This is not a problem for many of our daily appliances as they considerably limit possible user actions. For functionality like robot programming with a verbal dialog interface, however, it is important to guide the user with appropriate feedback from the robot and provide supplementary materials such as user manuals, tutorials, or instructional videos. Maya conducted a user study that replicates the described scenario. Participants in this study (15 men and 15 women, ages 19-70) with no prior knowledge of how to program the robot were left alone with the robot and a combination of supplementary materials. They had to figure out on their own how to program different skills such as picking up medicine from a cabinet or folding a towel.
The study revealed that information presented in the user manual easily gets overlooked and instructional videos are most useful in jump starting the interaction. In addition, trial-and-error plays a crucial role especially for achieving a certain proficiency level.
User studies like Maya’s, provide important insights into how the interface and the supplementary material should be designed to improve the learnability of end-user programmable robots. Check out the video for sample interactions and look for Maya and Leila Takayama’s upcoming publication for more details.
http://www.zeitnews.org/a(...)ram-new-robot-skills
Enabling End-Users to Program New Robot Skills

Mobile manipulators like the PR2 have the physical capability to do a range of useful tasks for humans, however their actual capabilities are limited by the software applications written by highly specialized programmers. Instead, Maya Cakmak from Georgia Tech, envisions robots that can be programmed by their end-users for their own specific needs. This past summer, Maya worked on developing a spoken dialog interface that allows a user to program new skills by physically moving PR2’s two arms and using simple speech commands.
Imagine purchasing a brand new “programmable” robot. How would you know what to do, to make the robot do something? This is not a problem for many of our daily appliances as they considerably limit possible user actions. For functionality like robot programming with a verbal dialog interface, however, it is important to guide the user with appropriate feedback from the robot and provide supplementary materials such as user manuals, tutorials, or instructional videos. Maya conducted a user study that replicates the described scenario. Participants in this study (15 men and 15 women, ages 19-70) with no prior knowledge of how to program the robot were left alone with the robot and a combination of supplementary materials. They had to figure out on their own how to program different skills such as picking up medicine from a cabinet or folding a towel.
The study revealed that information presented in the user manual easily gets overlooked and instructional videos are most useful in jump starting the interaction. In addition, trial-and-error plays a crucial role especially for achieving a certain proficiency level.
User studies like Maya’s, provide important insights into how the interface and the supplementary material should be designed to improve the learnability of end-user programmable robots. Check out the video for sample interactions and look for Maya and Leila Takayama’s upcoming publication for more details.
http://www.zeitnews.org/a(...)ram-new-robot-skills
"An educated citizenry is a vital requisite for our survival as a free people."
Die techniek bestaat al jaren. Het punt is alleen dat je hem 1 specifiek kunstje kan leren. Je kan hem bijvoorbeeld leren om een trui op te vouwen, maar het vouwen van een t-shirt, hemd of broek kan hij dan niet.Voor zover ik weet zijn we met AI nog niet zo ver dat een robot dergelijke taken kan generaliseren.
Nieuwe DARPA challenge
Bedrijven die mee doen moeten een robot bouwen die:
Eind 2014 willen ze de eerste robots zien. Behoorlijk optimistisch als je het mij vraagt. Maar we zullen zien
Bedrijven die mee doen moeten een robot bouwen die:
http://singularityhub.com(...)-robotics-challenge/quote:What DARPA wants to see is a robot that has human-like “mobility and manipulation” abilities. At a disaster scene robots will have to make use of the same machinery and tools that human rescue teams have to use. The different stages of the challenge are meant to simulate an emergency response to a natural or manmade disaster. The robot will enter an open-frame vehicle like a John Deere Gator or Polaris Ranger, turn it on, and drive it – steering, throttle, brakes and all – to the disaster scene. Once it’s pulled up to the pile of rubble, it will exit the vehicle and climb over the sloped terrain littered with loose rocks, trees, ditches, and other obstacles it has to negotiate or avoid. Eventually the robot will reach an entryway blocked with debris that it will have to remove. Once the debris is cleared, it has to operate a door handle and push the door open. Inside, it will have to climb a ladder to reach a catwalk. After crossing the catwalk it will reach a concrete panel or a framed wall that it has to bust through using something like an electric hammer or chisel. Waiting for it on the other side of the panel will be a series of pipes, only one of which will be leaking. The robot has to spot the smoke or hear the hissing sound to locate the faulty pipe and then close the pipe’s turn valve. Lastly, the rescue robot’s day will end after locating and replacing a cooling pump.
Eind 2014 willen ze de eerste robots zien. Behoorlijk optimistisch als je het mij vraagt. Maar we zullen zien
Het gaat er natuurlijk ook om dat ze steeds precieser die ene taak kunnen uitvoeren. Voor bedrijven als FOXCONN zijn juist dit soort robots enorm handig.quote:
Die techniek bestaat al jaren. Het punt is alleen dat je hem 1 specifiek kunstje kan leren. Je kan hem bijvoorbeeld leren om een trui op te vouwen, maar het vouwen van een t-shirt, hemd of broek kan hij dan niet.Voor zover ik weet zijn we met AI nog niet zo ver dat een robot dergelijke taken kan generaliseren.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Robots bij Foxconn (en elke andere automatiseerde fabriek) worden volledig voorgeprogrammeerd. Die teach-in methode is alleen handig als je een robot snel meerdere simpele taken wil leren. In een fabriek moet een robot jarenlang precies dezelfde, vaak complexe, taak doen. Met oog op nauwkeurigheid en cyclustijd doe je dat dan niet met teach-in.
20-11-2012
Verban 'moordrobots' al voor hun komst
Ook drones vereisen nauwelijks menselijk handelen © ap.
Robots die gemaakt zijn om te moorden zonder tussenkomst van menselijk handelen. Ze bestaan nog niet, maar Human Rights Watch en de rechtenfaculteit van de Amerikaanse universiteit Harvard riepen al op tot een internationaal verbod op zulke machines.
Dat staat te lezen in een rapport dat beide organisaties uitbrachten. "We roepen op tot een internationaal verdrag dat het absoluut verbiedt zogeheten moordrobots te ontwikkelen, produceren en als volledig op zichzelf werkende wapens te gebruiken."
Wapens waarbij nauwelijks menselijk handelen vereist is, bestaan al. Drones, onbemande vliegtuigen die boven onder andere Pakistan en Afghanistan surveilleren, zijn daarvan een voorbeeld.
(HLN)
Verban 'moordrobots' al voor hun komst

Ook drones vereisen nauwelijks menselijk handelen © ap.
Robots die gemaakt zijn om te moorden zonder tussenkomst van menselijk handelen. Ze bestaan nog niet, maar Human Rights Watch en de rechtenfaculteit van de Amerikaanse universiteit Harvard riepen al op tot een internationaal verbod op zulke machines.
Dat staat te lezen in een rapport dat beide organisaties uitbrachten. "We roepen op tot een internationaal verdrag dat het absoluut verbiedt zogeheten moordrobots te ontwikkelen, produceren en als volledig op zichzelf werkende wapens te gebruiken."
Wapens waarbij nauwelijks menselijk handelen vereist is, bestaan al. Drones, onbemande vliegtuigen die boven onder andere Pakistan en Afghanistan surveilleren, zijn daarvan een voorbeeld.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Hier laten ze in 10 minuten zien wat Asimo allemaal kan. Blijkbaar kan hij tegenwoordig al hinkelen!
Bij 07:08 zie je hem hinkelen

Bij 07:08 zie je hem hinkelen
"An educated citizenry is a vital requisite for our survival as a free people."
23-11-2012
Bijzondere robotjes lopen helemaal op eigen kracht
Onderzoekers van de universiteit van Illinois hebben ‘bio-bots’ ontwikkeld: kleine, zachte robotjes die aan één zijde bekleed zijn met de hartcellen van ratten en zo in staat zijn om helemaal zelfstandig te wandelen.
De robotjes zijn gemaakt van hydrogel en heel flexibel. De robotjes zijn eigenlijk in twee stukken te verdelen. Een lang achterstuk, en een kort voorstuk. Het achterstuk is bekleed met de hartcellen van ratten. Wanneer deze hartcellen slaan, komt het achterstuk in beweging en duwt het voorstuk als het ware voort.
3D-printer
Om de zeven millimeter lange robots te ontwikkelen, maakten de onderzoekers gebruik van hydrogel, hartcellen en een 3D-printer. Bij de ontwikkeling van de robots lieten ze zich inspireren door de natuur. “Wij ingenieurs bouwen dingen altijd van harde materialen, materialen die zich voorspelbaar gedragen,” vertelt onderzoeker Rashid Bashir. “Toch zijn er veel toepassingen waarbij de natuur een probleem op een andere, elegante manier oplost. Door te ontwerpen met behulp van biologische structuren, kunnen we de kracht van cellen en de natuur gebruiken om uitdagingen waar de maatschappij vandaag de dag mee te maken heeft, aangaan.”
Mogelijkheden
De onderzoekers zien genoeg mogelijkheden voor hun bio-bots. Zo zouden ze ingezet kunnen worden als sensoren. Door de bio-bots te bekleden met cellen die op bepaalde prikkels (bijvoorbeeld een chemische stof) reageren, kan door alleen maar naar de biobot te kijken, worden vastgesteld of zo’n prikkel zich in de directe omgeving bevindt. “Je kunt dan denken aan een sensor die zichzelf voortbeweegt, voortdurend monsters verzamelt en zich nuttig maakt in de medische wereld of zich inzet voor het milieu. Er zijn heel veel mogelijkheden, afhankelijk van de type cellen die we gebruiken.”
De onderzoekers blijven aan de robots knutselen. Zo werken ze aan robots met verschillende vormen, meer benen en robots die hellingen of trappen kunnen beklimmen.
(scientias.nl)
Bijzondere robotjes lopen helemaal op eigen kracht

Onderzoekers van de universiteit van Illinois hebben ‘bio-bots’ ontwikkeld: kleine, zachte robotjes die aan één zijde bekleed zijn met de hartcellen van ratten en zo in staat zijn om helemaal zelfstandig te wandelen.
De robotjes zijn gemaakt van hydrogel en heel flexibel. De robotjes zijn eigenlijk in twee stukken te verdelen. Een lang achterstuk, en een kort voorstuk. Het achterstuk is bekleed met de hartcellen van ratten. Wanneer deze hartcellen slaan, komt het achterstuk in beweging en duwt het voorstuk als het ware voort.
3D-printer
Om de zeven millimeter lange robots te ontwikkelen, maakten de onderzoekers gebruik van hydrogel, hartcellen en een 3D-printer. Bij de ontwikkeling van de robots lieten ze zich inspireren door de natuur. “Wij ingenieurs bouwen dingen altijd van harde materialen, materialen die zich voorspelbaar gedragen,” vertelt onderzoeker Rashid Bashir. “Toch zijn er veel toepassingen waarbij de natuur een probleem op een andere, elegante manier oplost. Door te ontwerpen met behulp van biologische structuren, kunnen we de kracht van cellen en de natuur gebruiken om uitdagingen waar de maatschappij vandaag de dag mee te maken heeft, aangaan.”
Mogelijkheden
De onderzoekers zien genoeg mogelijkheden voor hun bio-bots. Zo zouden ze ingezet kunnen worden als sensoren. Door de bio-bots te bekleden met cellen die op bepaalde prikkels (bijvoorbeeld een chemische stof) reageren, kan door alleen maar naar de biobot te kijken, worden vastgesteld of zo’n prikkel zich in de directe omgeving bevindt. “Je kunt dan denken aan een sensor die zichzelf voortbeweegt, voortdurend monsters verzamelt en zich nuttig maakt in de medische wereld of zich inzet voor het milieu. Er zijn heel veel mogelijkheden, afhankelijk van de type cellen die we gebruiken.”
De onderzoekers blijven aan de robots knutselen. Zo werken ze aan robots met verschillende vormen, meer benen en robots die hellingen of trappen kunnen beklimmen.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
27-11-2012
Wetenschappers gaan vast nadenken over ‘bestaansbedreigende technologie’
De universiteit van Cambridge gaat een nieuw centrum beginnen, waar wetenschappers, filosofen en computertechnici kunnen discussiëren over de voor- en nadelen van kunstmatige intelligentie, en daarmee zelfs het voortbestaan van de mens.
Het centrum is een serieuze poging om wetenschappers beter inzicht te geven in de voors en tegens van AI, ‘Artificial Intelligence’. Want, zo redeneren de onderzoekers, dat zou mogelijk een gevaar kunnen gaan vormen voor de wereld.
Bestaansbedreigende technologiën
Het centrum wordt opgericht door een filosoof, een onderzoeker, en een computerwetenschapper. In het ‘Center for the Study of Existential Risk’ (CSER), kan over alles worden gediscussieerd wat met de toekomst van technologie te maken heeft, maar vooral over “technologieën die ons bestaan kunnen bedreigen.” Dat kan gaan over bio- en nanotechnologie, maar ook over klimaatverandering of over kunstmatige intelligentie.
Nieuwe evolutie
“Kunstmatige intelligentie gaat straks ons leven beheersen,” zegt oprichter en filosoof Huw Price. “We zullen op een moment komen, in deze eeuw of misschien de volgende, dat de volgende grote stap voor de mensheid eraan gaat komen – misschien wel de grootste in onze hele kosmische historie.” Price doelt daarmee op het “verplaatsen van intelligentie buiten de grenzen van de biologie.”
Superintelligent
Price borduurt voort op een paper dat in 1965 door Irving Good werd geschreven. Good speculeerde toen al over een ‘ultra-intelligente machine’, die slimmer dan een mens zou zijn. Price: “De natuur verwachtte ons als mens niet, en toch zijn we er. Nu moeten wij niet dezelfde fout maken door AGI (Artificial General Intelligence) te onderschatten. We moeten accepteren dat we straks misschien wel een doos van Pandora gaan openen waar we niet meer van terug kunnen keren, en waarmee het voortbestaan van de mensheid wordt bedreigd.”
Ethiek bij AI
Price werd voor zijn idee geïnspireerd door gesprekken met Jaan Tallinn, mede-oprichter van Skype. Tallinn geldt als een expert op het gebied van ethiek bij AI. Price: “Ik begon na te denken over de mogelijke implicaties van AI toen Tallinn zijn zorgen erover uitsprak. Als iemand die er zo serieus over denkt, er zo bang voor is, dan weet je dat je met een serieus dilemma te maken hebt.”
Speculaties
Price en Tallinn noemen enkele voorbeelden van mogelijke gevaren van ultra-artificiële intelligentie. “Robots die mogelijk onze middelen nodig hebben, of sterker worden dan wij…” Price geeft gelijk toe dat het gaat om speculaties en er niks zeker is. “Maar juist omdát we het niet weten, moeten we er wel over na gaan denken.”
“We zijn, als mensheid, op een punt gekomen waarop we eindelijk kunnen erkennen dat onze technologie zo ver is dat deze ons bestaan zou kunnen bedreigen,” zegt Price. Hij verwacht wel dat het centrum een succes wordt, want steeds meer wetenschappers hebben volgens hem aangegeven dat het een goed idee is dat er over dergelijke zaken moet worden nagedacht. “We zouden in ieder geval een klein beetje van onze middelen in moeten zetten om over deze onzekere toekomst na te denken.”
(scientias.nl)
Wetenschappers gaan vast nadenken over ‘bestaansbedreigende technologie’

De universiteit van Cambridge gaat een nieuw centrum beginnen, waar wetenschappers, filosofen en computertechnici kunnen discussiëren over de voor- en nadelen van kunstmatige intelligentie, en daarmee zelfs het voortbestaan van de mens.
Het centrum is een serieuze poging om wetenschappers beter inzicht te geven in de voors en tegens van AI, ‘Artificial Intelligence’. Want, zo redeneren de onderzoekers, dat zou mogelijk een gevaar kunnen gaan vormen voor de wereld.
Bestaansbedreigende technologiën
Het centrum wordt opgericht door een filosoof, een onderzoeker, en een computerwetenschapper. In het ‘Center for the Study of Existential Risk’ (CSER), kan over alles worden gediscussieerd wat met de toekomst van technologie te maken heeft, maar vooral over “technologieën die ons bestaan kunnen bedreigen.” Dat kan gaan over bio- en nanotechnologie, maar ook over klimaatverandering of over kunstmatige intelligentie.
Nieuwe evolutie
“Kunstmatige intelligentie gaat straks ons leven beheersen,” zegt oprichter en filosoof Huw Price. “We zullen op een moment komen, in deze eeuw of misschien de volgende, dat de volgende grote stap voor de mensheid eraan gaat komen – misschien wel de grootste in onze hele kosmische historie.” Price doelt daarmee op het “verplaatsen van intelligentie buiten de grenzen van de biologie.”
Superintelligent
Price borduurt voort op een paper dat in 1965 door Irving Good werd geschreven. Good speculeerde toen al over een ‘ultra-intelligente machine’, die slimmer dan een mens zou zijn. Price: “De natuur verwachtte ons als mens niet, en toch zijn we er. Nu moeten wij niet dezelfde fout maken door AGI (Artificial General Intelligence) te onderschatten. We moeten accepteren dat we straks misschien wel een doos van Pandora gaan openen waar we niet meer van terug kunnen keren, en waarmee het voortbestaan van de mensheid wordt bedreigd.”
Ethiek bij AI
Price werd voor zijn idee geïnspireerd door gesprekken met Jaan Tallinn, mede-oprichter van Skype. Tallinn geldt als een expert op het gebied van ethiek bij AI. Price: “Ik begon na te denken over de mogelijke implicaties van AI toen Tallinn zijn zorgen erover uitsprak. Als iemand die er zo serieus over denkt, er zo bang voor is, dan weet je dat je met een serieus dilemma te maken hebt.”
Speculaties
Price en Tallinn noemen enkele voorbeelden van mogelijke gevaren van ultra-artificiële intelligentie. “Robots die mogelijk onze middelen nodig hebben, of sterker worden dan wij…” Price geeft gelijk toe dat het gaat om speculaties en er niks zeker is. “Maar juist omdát we het niet weten, moeten we er wel over na gaan denken.”
“We zijn, als mensheid, op een punt gekomen waarop we eindelijk kunnen erkennen dat onze technologie zo ver is dat deze ons bestaan zou kunnen bedreigen,” zegt Price. Hij verwacht wel dat het centrum een succes wordt, want steeds meer wetenschappers hebben volgens hem aangegeven dat het een goed idee is dat er over dergelijke zaken moet worden nagedacht. “We zouden in ieder geval een klein beetje van onze middelen in moeten zetten om over deze onzekere toekomst na te denken.”
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Op de site zelf zie je een video verslag.
Robot developer attempts to speed up A.I. tech
(CBS News) Almost no one likes doing household chores, but most people don't have a choice -- they have to do them. However, a new robot generation may be about to change that. And that high-tech breakthrough could also change us.
Pictures: Robot tech goes into overdrive
The PR2 robot can shoot pool, bake cookies from scratch, and maybe, most importantly, can fetch and open a beer. It's the most advanced personal robot in a galaxy that isn't quite so far, far away.
Steve Cousins, chief executive officer of Willow Garage, a tech development company in California's Silicon Valley, said, "This robot can do things that people can do."
The real-world robot is the creation of Cousins' Silicon Valley company that is working to spawn a new industry in personal robots.
Cousins said, "Think about Rosie from 'The Jetsons,' but maybe without the attitude."
But is that realistic? Cousins said, "Rosie's a cartoon, right? But the idea that you can have a robotic device that can move around in a human space and do things for us is real. That's actually happening."
While fantasies of robotic maids may still be a dream, the field of robotics is progressing rapidly and the PR2 is at the center of that progress. "We created this open source software platform that is what Windows is to the PC," Cousins explained. "Everybody's sharing software and we can make progress to this future where we see robots."
Until Willow Garage created the PR2, each robotics researcher had to build their own robot from scratch before they could even begin experimenting. Pieter Abbeel, professor of Electrical Engineering and Computer Sciences at the University of California, Berkeley, said, "You spent so much time building and maintaining that contraption that your research would be really slowed down."
Abbeel got one of 11 PR2s that Willow Garage gave to university researchers who agreed to share their work to speed the evolution of artificial intelligence.
Abbeel decided to teach his robot to fold laundry -- not as mundane a task as you might think. Abbeel explained, "The big challenge in robotics right now is how to make robots deal with variability. Whenever things change around the robot, it needs to understand what it is that has changed and how to act on it. Any time you present a pile of laundry, it's going to be different. You're manipulating this towels, T-shirts, and so forth. The more variability, the harder the task is going to be."
To be of practical use in the home, robots need to figure out a changing world around them. To do that, the PR2 is loaded with sensors that reveal its surroundings in 3D. It knows when someone is in a room with it and sees the person in detail. But while seeing is one step, understanding is another.
At the forefront of robotic help will be aid for senior citizens. Abbeel said, "If we can program a way for machines to learn, then they could have a lot more intellectual capabilities after a while."
Researchers don't have to program everything the machine does -- they have to teach the machine to think by itself. Abbeel said, "We want to allow the machine to watch people do things and learn from that. It just kind of fumbles around with things and after a while realizes, 'Oh, this is how this works.' "
Since its inception, the robot has been imagined as both a helpful friend and a force that learned too much and became dangerous to its human inventors.
Asked if we have to worry about robots taking over the world some time, Cousins said, "It has no intention of taking over the world. Unless somebody programs the robot and says, you know, 'What you're supposed to do is kill all humans.' "
Asked about people with evil intentions, Cousins said, "But even if they did, at the end of that, so the robots killed all humans. (The robot) doesn't have anything to do next, right? It doesn't have like, 'Oh, now what I should do? Well, I should, you know, procreate or something, right?' They don't do that."
While those tired of folding laundry may be tempted to buy a PR2, the $400,000 price tag is a bit steep. Still, with robotics advancing quickly, a future free of household chores may, one day, be priceless.
Watch John Blackstone's full report in the video above.
http://www.cbsnews.com/83(...)o-speed-up-a.i-tech/
Robot developer attempts to speed up A.I. tech
(CBS News) Almost no one likes doing household chores, but most people don't have a choice -- they have to do them. However, a new robot generation may be about to change that. And that high-tech breakthrough could also change us.
Pictures: Robot tech goes into overdrive
The PR2 robot can shoot pool, bake cookies from scratch, and maybe, most importantly, can fetch and open a beer. It's the most advanced personal robot in a galaxy that isn't quite so far, far away.
Steve Cousins, chief executive officer of Willow Garage, a tech development company in California's Silicon Valley, said, "This robot can do things that people can do."
The real-world robot is the creation of Cousins' Silicon Valley company that is working to spawn a new industry in personal robots.
Cousins said, "Think about Rosie from 'The Jetsons,' but maybe without the attitude."
But is that realistic? Cousins said, "Rosie's a cartoon, right? But the idea that you can have a robotic device that can move around in a human space and do things for us is real. That's actually happening."
While fantasies of robotic maids may still be a dream, the field of robotics is progressing rapidly and the PR2 is at the center of that progress. "We created this open source software platform that is what Windows is to the PC," Cousins explained. "Everybody's sharing software and we can make progress to this future where we see robots."
Until Willow Garage created the PR2, each robotics researcher had to build their own robot from scratch before they could even begin experimenting. Pieter Abbeel, professor of Electrical Engineering and Computer Sciences at the University of California, Berkeley, said, "You spent so much time building and maintaining that contraption that your research would be really slowed down."
Abbeel got one of 11 PR2s that Willow Garage gave to university researchers who agreed to share their work to speed the evolution of artificial intelligence.
Abbeel decided to teach his robot to fold laundry -- not as mundane a task as you might think. Abbeel explained, "The big challenge in robotics right now is how to make robots deal with variability. Whenever things change around the robot, it needs to understand what it is that has changed and how to act on it. Any time you present a pile of laundry, it's going to be different. You're manipulating this towels, T-shirts, and so forth. The more variability, the harder the task is going to be."
To be of practical use in the home, robots need to figure out a changing world around them. To do that, the PR2 is loaded with sensors that reveal its surroundings in 3D. It knows when someone is in a room with it and sees the person in detail. But while seeing is one step, understanding is another.
At the forefront of robotic help will be aid for senior citizens. Abbeel said, "If we can program a way for machines to learn, then they could have a lot more intellectual capabilities after a while."
Researchers don't have to program everything the machine does -- they have to teach the machine to think by itself. Abbeel said, "We want to allow the machine to watch people do things and learn from that. It just kind of fumbles around with things and after a while realizes, 'Oh, this is how this works.' "
Since its inception, the robot has been imagined as both a helpful friend and a force that learned too much and became dangerous to its human inventors.
Asked if we have to worry about robots taking over the world some time, Cousins said, "It has no intention of taking over the world. Unless somebody programs the robot and says, you know, 'What you're supposed to do is kill all humans.' "
Asked about people with evil intentions, Cousins said, "But even if they did, at the end of that, so the robots killed all humans. (The robot) doesn't have anything to do next, right? It doesn't have like, 'Oh, now what I should do? Well, I should, you know, procreate or something, right?' They don't do that."
While those tired of folding laundry may be tempted to buy a PR2, the $400,000 price tag is a bit steep. Still, with robotics advancing quickly, a future free of household chores may, one day, be priceless.
Watch John Blackstone's full report in the video above.
http://www.cbsnews.com/83(...)o-speed-up-a.i-tech/
"An educated citizenry is a vital requisite for our survival as a free people."
02-11-2012
Wetenschappers maken concept voor 'transformer'-robot
Onderzoekers hebben een robot ontwikkeld die zich in potentie in alle mogelijke vormen kan vouwen. Het prototype is gebaseerd op de werking van eiwitten, die zich in het lichaam ook op allerlei wijzes kunnen vouwen. De 'transformer'-robot werkt met magneten.
De zogenaamde milli-motein is ontwikkeld door het Amerikaanse MIT en is ongeveer een centimeter groot. Door een ketting van soortgelijke componenten te maken, ziet de robot er relatief simpel uit, maar de milli-motein zou in staat zijn om alle kanten op te 'vouwen' en daardoor alle mogelijke vormen aan te nemen. De MIT-wetenschappers zorgen voor de vouwen met een speciaal type motor, dat door hen een elektropermanent-type wordt genoemd.
Volgens de onderzoekers werkt de motor op vergelijkbare wijze als magneten die worden gebruikt door een autosloper: dergelijke systemen bestaan uit één sterke magneet en een zwakkere. De richting van het magnetisch veld van de zwakkere magneet kan daarbij veranderd worden, waardoor het magnetisme van de sterkere magneet of versterkt of verzwakt wordt. De wetenschappers gebruikten een vergelijkbaar systeem in ringvorm die elk onderdeel van de robotketting kan vervormen. Zo is er alleen energie nodig om de robot van toestand te laten veranderen, maar niet om deze in een bepaalde vorm te houden.
De wetenschappers gaan er vanuit dat een keten van dergelijke ringen alle vormen kan aannemen, zolang deze maar lang genoeg is. Dit concept is afgekeken van hoe eiwitten in het lichaam worden gevormd; deze bestaan bij de fabricage ook uit lange ketens die vervolgens in een specifieke 3d-structuur worden gevouwen. Er bestaan miljoenen verschillende soorten eiwitten die allemaal hun eigen vorm hebben.
Voorlopig hebben de wetenschappers slechts op millimeterschaal dergelijke vouwbare robots ontwikkeld. Er wordt echter gewerkt aan varianten die zo groot zijn als mensen
(tweakers.net)
Wetenschappers maken concept voor 'transformer'-robot
Onderzoekers hebben een robot ontwikkeld die zich in potentie in alle mogelijke vormen kan vouwen. Het prototype is gebaseerd op de werking van eiwitten, die zich in het lichaam ook op allerlei wijzes kunnen vouwen. De 'transformer'-robot werkt met magneten.
De zogenaamde milli-motein is ontwikkeld door het Amerikaanse MIT en is ongeveer een centimeter groot. Door een ketting van soortgelijke componenten te maken, ziet de robot er relatief simpel uit, maar de milli-motein zou in staat zijn om alle kanten op te 'vouwen' en daardoor alle mogelijke vormen aan te nemen. De MIT-wetenschappers zorgen voor de vouwen met een speciaal type motor, dat door hen een elektropermanent-type wordt genoemd.
Volgens de onderzoekers werkt de motor op vergelijkbare wijze als magneten die worden gebruikt door een autosloper: dergelijke systemen bestaan uit één sterke magneet en een zwakkere. De richting van het magnetisch veld van de zwakkere magneet kan daarbij veranderd worden, waardoor het magnetisme van de sterkere magneet of versterkt of verzwakt wordt. De wetenschappers gebruikten een vergelijkbaar systeem in ringvorm die elk onderdeel van de robotketting kan vervormen. Zo is er alleen energie nodig om de robot van toestand te laten veranderen, maar niet om deze in een bepaalde vorm te houden.
De wetenschappers gaan er vanuit dat een keten van dergelijke ringen alle vormen kan aannemen, zolang deze maar lang genoeg is. Dit concept is afgekeken van hoe eiwitten in het lichaam worden gevormd; deze bestaan bij de fabricage ook uit lange ketens die vervolgens in een specifieke 3d-structuur worden gevouwen. Er bestaan miljoenen verschillende soorten eiwitten die allemaal hun eigen vorm hebben.
Voorlopig hebben de wetenschappers slechts op millimeterschaal dergelijke vouwbare robots ontwikkeld. Er wordt echter gewerkt aan varianten die zo groot zijn als mensen
(tweakers.net)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Playing Catch and Juggling with a Humanoid Robot
Robots in entertainment environments typically do not allow for physical interaction and contact with people. However, catching and throwing back objects is one form of physical engagement that still maintains a safe distance between the robot and participants. Using an animatronic humanoid robot, we developed a test bed for a throwing and catching game scenario.
We use an external camera system (ASUS Xtion PRO LIVE) to locate balls and a Kalman filter to predict ball destination and timing. The robot's hand and joint-space are calibrated to the vision coordinate system using a least-squares technique, such that the hand can be positioned to the predicted location. Successful catches are thrown back two and a half meters forward to the participant, and missed catches are detected to trigger suitable animations that indicate failure.
Human to robot partner juggling (three ball cascade pattern, one hand for each partner) is also achieved by speeding up the catching/throwing cycle. We tested the throwing/catching system on six participants (one child and five adults, including one elderly), and the juggling system on three skilled jugglers.
Robots in entertainment environments typically do not allow for physical interaction and contact with people. However, catching and throwing back objects is one form of physical engagement that still maintains a safe distance between the robot and participants. Using an animatronic humanoid robot, we developed a test bed for a throwing and catching game scenario.
We use an external camera system (ASUS Xtion PRO LIVE) to locate balls and a Kalman filter to predict ball destination and timing. The robot's hand and joint-space are calibrated to the vision coordinate system using a least-squares technique, such that the hand can be positioned to the predicted location. Successful catches are thrown back two and a half meters forward to the participant, and missed catches are detected to trigger suitable animations that indicate failure.
Human to robot partner juggling (three ball cascade pattern, one hand for each partner) is also achieved by speeding up the catching/throwing cycle. We tested the throwing/catching system on six participants (one child and five adults, including one elderly), and the juggling system on three skilled jugglers.

"An educated citizenry is a vital requisite for our survival as a free people."
06-12-2012
Een record: zwemmende robot steekt Stille Oceaan over
Zwemmende robot Papa Mau heeft een wereldrecord neergezet: de robot stak de Stille Oceaan over en voltooide met zijn aankomst in Australië de langste reis die ooit door een autonoom voertuig is afgelegd.
‘Wave Glider’ Papa Mau legde in totaal 16.668 kilometer af. En het was een veelbewogen trip: de robot kreeg tijdens zijn reis die meer dan een jaar duurde, onder meer te maken met haaien en zware stormen. Maar Papa Mau liet zich niet tegenhouden en rondde de oversteek af door keurig in Australië te arriveren.
Gegevens
Terwijl de robot aan zijn recordpoging bezig was, verzamelde deze ook nog eens allerhande gegevens. Bijvoorbeeld de watertemperatuur, maar ook informatie over het zoutgehalte van het water en de weersomstandigheden. Die informatie wordt nu aan wetenschappers verstrekt. Zij kunnen de gegevens onder meer gaan gebruiken in studies naar de gezondheid van de oceanen.
Trots
“Stellen dat we blij en trots zijn dat Papa Mau zijn eindbestemming heeft bereikt, is een understatement,” stelt Bill Vass, algemeen directeur van Liquid Robotics, het bedrijf dat de robots bouwde. “We startten de PacX-reis (PacX staat voor Pacific Crossing, red.) om aan te tonen dat de Wave Glider-technologie niet alleen de grote zeeën en zo’n lange reis kon overleven, maar belangrijker nog: ook real-time informatie over de meest afgelegen delen van de Stille Oceaan kon verzamelen en versturen.”
Papa Mau was overigens niet de enige robot van Liquid Robotics die onderweg was om geschiedenis te schrijven. Ook robot Benjamin is nog onderweg, deze komt naar verwachting begin 2013 in Australië aan. En dan zijn er nog twee robots onderweg naar Japan.
(scientias.nl)
Een record: zwemmende robot steekt Stille Oceaan over

Zwemmende robot Papa Mau heeft een wereldrecord neergezet: de robot stak de Stille Oceaan over en voltooide met zijn aankomst in Australië de langste reis die ooit door een autonoom voertuig is afgelegd.
‘Wave Glider’ Papa Mau legde in totaal 16.668 kilometer af. En het was een veelbewogen trip: de robot kreeg tijdens zijn reis die meer dan een jaar duurde, onder meer te maken met haaien en zware stormen. Maar Papa Mau liet zich niet tegenhouden en rondde de oversteek af door keurig in Australië te arriveren.
Gegevens
Terwijl de robot aan zijn recordpoging bezig was, verzamelde deze ook nog eens allerhande gegevens. Bijvoorbeeld de watertemperatuur, maar ook informatie over het zoutgehalte van het water en de weersomstandigheden. Die informatie wordt nu aan wetenschappers verstrekt. Zij kunnen de gegevens onder meer gaan gebruiken in studies naar de gezondheid van de oceanen.
Trots
“Stellen dat we blij en trots zijn dat Papa Mau zijn eindbestemming heeft bereikt, is een understatement,” stelt Bill Vass, algemeen directeur van Liquid Robotics, het bedrijf dat de robots bouwde. “We startten de PacX-reis (PacX staat voor Pacific Crossing, red.) om aan te tonen dat de Wave Glider-technologie niet alleen de grote zeeën en zo’n lange reis kon overleven, maar belangrijker nog: ook real-time informatie over de meest afgelegen delen van de Stille Oceaan kon verzamelen en versturen.”
Papa Mau was overigens niet de enige robot van Liquid Robotics die onderweg was om geschiedenis te schrijven. Ook robot Benjamin is nog onderweg, deze komt naar verwachting begin 2013 in Australië aan. En dan zijn er nog twee robots onderweg naar Japan.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Langzaam aan beginnen drones meer op zwevende robots te lijken. Echt een vreemd gezicht:
While we're well aware that robots will prove our undoing, we didn't expect DARPA to make it so... easy. It just demonstrated and helped fund the MLB Company's V-Bat, a testbed UAV that can fly or hover while brandishing a 6-foot claw. Yes, we know what you're thinking. Officially, there's an innocuous reason for the giant arm: a stereo vision system, in tandem with GPS, lets the robot precisely deliver one-pound payloads with the kind of reach that us fleshy anthropods wouldn't have. We're not quite so comforted after realizing that the robot can find its target without human input, however. DARPA sees the V-Bat as a stepping stone towards more autonomous vehicles, and it likely has noble intentions at heart. If V-Bat's descendants ultimately decide that humans are the payload, though, we'll know exactly who to blame.
http://www.engadget.com/2(...)ne-with-6-foot-claw/

While we're well aware that robots will prove our undoing, we didn't expect DARPA to make it so... easy. It just demonstrated and helped fund the MLB Company's V-Bat, a testbed UAV that can fly or hover while brandishing a 6-foot claw. Yes, we know what you're thinking. Officially, there's an innocuous reason for the giant arm: a stereo vision system, in tandem with GPS, lets the robot precisely deliver one-pound payloads with the kind of reach that us fleshy anthropods wouldn't have. We're not quite so comforted after realizing that the robot can find its target without human input, however. DARPA sees the V-Bat as a stepping stone towards more autonomous vehicles, and it likely has noble intentions at heart. If V-Bat's descendants ultimately decide that humans are the payload, though, we'll know exactly who to blame.

http://www.engadget.com/2(...)ne-with-6-foot-claw/
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

12-12-2012
Mini-robot gaat Japanse astronauten gezelschap houden
Japanse astronauten die volgend jaar naar het internationale ruimtestation vertrekken, hoeven in ieder geval niet bang te zijn voor de eenzaamheid. Een speciaal voor de ruimtemissie ontwikkelde mini-robot gaat met ze mee.
De Japanse ruimtevaartorganisatie vond dat het tijd werd om op zoek te gaan naar een oplossing voor sociale problemen die astronauten aan boord van het ISS kunnen ervaren. Een speciaal projectteam werkte het afgelopen jaar aan een oplossing: een robot die astronauten gezelschap kan houden.
Communicatie
Het resulteerde in een robot van ongeveer 34 centimeter hoog en een kilo zwaar. De robot kan onder meer spraak herkennen en verwerken, zelf spreken en gezichten herkennen. Aangezien de robot vooral een sociale functie heeft, hebben de onderzoekers ervoor gekozen om de robot een vrij menselijk uiterlijk te geven, met een hoofd, twee armen en twee benen. De robot kan niet alleen met astronauten communiceren, maar ook informatie naar de aarde sturen en dus dienst doen als een soort PR-medewerker in de ruimte.
Gesprek in de ruimte
Volgend jaar gaat de robot met een Japanse astronaut de ruimte in. Een mijlpaal: voor het eerst zullen een robot en een mens dan in de ruimte een gesprek voeren.
De robot is het resultaat van een samenwerking tussen verschillende bedrijven en onderzoeksinstellingen, waaronder de universiteit van Tokyo. Als het aan de ontwikkelaars ligt, is de robot niet het eindstation: de ervaringen die straks op aarde en in de ruimte met de robot worden opgedaan, kunnen weer gebruikt worden om een robot te ontwikkelen die nog beter in staat is om met mensen samen te leven.
(scientias.nl)
Mini-robot gaat Japanse astronauten gezelschap houden

Japanse astronauten die volgend jaar naar het internationale ruimtestation vertrekken, hoeven in ieder geval niet bang te zijn voor de eenzaamheid. Een speciaal voor de ruimtemissie ontwikkelde mini-robot gaat met ze mee.
De Japanse ruimtevaartorganisatie vond dat het tijd werd om op zoek te gaan naar een oplossing voor sociale problemen die astronauten aan boord van het ISS kunnen ervaren. Een speciaal projectteam werkte het afgelopen jaar aan een oplossing: een robot die astronauten gezelschap kan houden.
Communicatie
Het resulteerde in een robot van ongeveer 34 centimeter hoog en een kilo zwaar. De robot kan onder meer spraak herkennen en verwerken, zelf spreken en gezichten herkennen. Aangezien de robot vooral een sociale functie heeft, hebben de onderzoekers ervoor gekozen om de robot een vrij menselijk uiterlijk te geven, met een hoofd, twee armen en twee benen. De robot kan niet alleen met astronauten communiceren, maar ook informatie naar de aarde sturen en dus dienst doen als een soort PR-medewerker in de ruimte.
Gesprek in de ruimte
Volgend jaar gaat de robot met een Japanse astronaut de ruimte in. Een mijlpaal: voor het eerst zullen een robot en een mens dan in de ruimte een gesprek voeren.
De robot is het resultaat van een samenwerking tussen verschillende bedrijven en onderzoeksinstellingen, waaronder de universiteit van Tokyo. Als het aan de ontwikkelaars ligt, is de robot niet het eindstation: de ervaringen die straks op aarde en in de ruimte met de robot worden opgedaan, kunnen weer gebruikt worden om een robot te ontwikkelen die nog beter in staat is om met mensen samen te leven.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Japanese Researchers Continue Quest To Build Life-Like Humanoid Robots
In the graphic novel The Watchmen, the physicist Jon Osterman is vaporized in an experiment and comes back as the god-like Doctor Manhattan after meticulously putting himself together again one organ system at a time. In a way, Japanese researchers are doing their own version of this through efforts to create human-like robots, though it’s requiring a much longer time frame to make a person out of metal and plastics.
In a recent effort to mimic the human musculoskeletal system, researchers at the University of Tokyo unveiled Kenshiro, a 50-kg robot that has the bones and muscles akin to a 12-year-old boy. The bones are made from aluminum, and the bot has individual ribs as well as floating knee cap (patella). Kenshiro was designed with many of the major muscle groups of the body, 160 in total with most of them being in the torso and legs. The muscles consist of pulley systems driven by single actuators to create planar muscles rather than point-to-point cables used previously.
Combined, these systems produce joint motion that is close to the rate that humans can move joints, thanks to a design that balances power, flexibility, and weight.
Here’s Kenshiro in action:
This latest bot is an extension of the Kojiro robot that was revealed in 2010, which had many of the joints found in humans but did not expressly mimic individual bones and muscles. Kenshiro is a refinement for sure as the new bones and muscle systems allow Kenshiro greater degrees of freedom: 64 in total, compared to 60 in Kojiro. However, this redesign has given Kenshiro a total power output five times more than Kojiro.
But more importantly, bones and planar muscles are what humans are made of, so this achievement is significant toward the development of androids that are anatomically similar to us.
Check out the video on Kojiro to see the difference in form and function:
For all these cool developments, it’s important to realize just how far robotics need to go to get to truly physical “human-like” state. For instance, last year Japanese researchers at AIST unveiled to the world a male version of their female Actroid-F android robot, which mimics the movements of people under observation. Their life-likeness is relative, as they only have 12 degrees of freedom in the face, making expressions rather limited. Additionally, the male version turned out to be the same as the female version, just with different hair and clothes.
It’s worth taking a look at the “ultra-realistic” bots, as Diginfo dubbed them, to get a sense of how far things still need to progress to get to a version that we could interact with and not have the creepy Uncanny Valley experience noted by many:
In the years to come, news of robotics development will only increase as we watch researchers put humans together much like Doctor Manhattan. Whether individual bones and muscles will work best or some other design will prove superior will only be resolved once each design can be tested. In the end, the greatest challenge may not be creating individual robotics systems or artificial intelligence, but packing all of these components into a single robot.
One thing is clear: when it comes to androids, our best gauge of “human-like” may be how freaked out we are when we discover that the person we are speaking to is a robot.
http://singularityhub.com(...)ike-humanoid-robots/
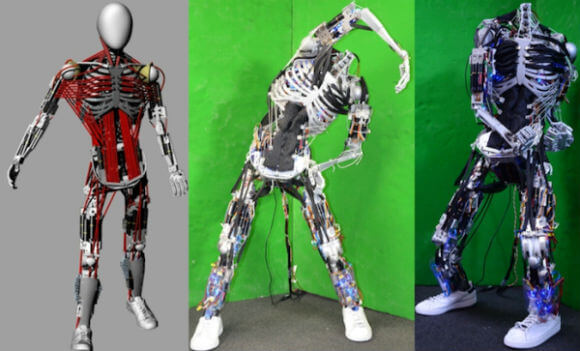
In the graphic novel The Watchmen, the physicist Jon Osterman is vaporized in an experiment and comes back as the god-like Doctor Manhattan after meticulously putting himself together again one organ system at a time. In a way, Japanese researchers are doing their own version of this through efforts to create human-like robots, though it’s requiring a much longer time frame to make a person out of metal and plastics.
In a recent effort to mimic the human musculoskeletal system, researchers at the University of Tokyo unveiled Kenshiro, a 50-kg robot that has the bones and muscles akin to a 12-year-old boy. The bones are made from aluminum, and the bot has individual ribs as well as floating knee cap (patella). Kenshiro was designed with many of the major muscle groups of the body, 160 in total with most of them being in the torso and legs. The muscles consist of pulley systems driven by single actuators to create planar muscles rather than point-to-point cables used previously.
Combined, these systems produce joint motion that is close to the rate that humans can move joints, thanks to a design that balances power, flexibility, and weight.
Here’s Kenshiro in action:

This latest bot is an extension of the Kojiro robot that was revealed in 2010, which had many of the joints found in humans but did not expressly mimic individual bones and muscles. Kenshiro is a refinement for sure as the new bones and muscle systems allow Kenshiro greater degrees of freedom: 64 in total, compared to 60 in Kojiro. However, this redesign has given Kenshiro a total power output five times more than Kojiro.
But more importantly, bones and planar muscles are what humans are made of, so this achievement is significant toward the development of androids that are anatomically similar to us.
Check out the video on Kojiro to see the difference in form and function:

For all these cool developments, it’s important to realize just how far robotics need to go to get to truly physical “human-like” state. For instance, last year Japanese researchers at AIST unveiled to the world a male version of their female Actroid-F android robot, which mimics the movements of people under observation. Their life-likeness is relative, as they only have 12 degrees of freedom in the face, making expressions rather limited. Additionally, the male version turned out to be the same as the female version, just with different hair and clothes.
It’s worth taking a look at the “ultra-realistic” bots, as Diginfo dubbed them, to get a sense of how far things still need to progress to get to a version that we could interact with and not have the creepy Uncanny Valley experience noted by many:

In the years to come, news of robotics development will only increase as we watch researchers put humans together much like Doctor Manhattan. Whether individual bones and muscles will work best or some other design will prove superior will only be resolved once each design can be tested. In the end, the greatest challenge may not be creating individual robotics systems or artificial intelligence, but packing all of these components into a single robot.
One thing is clear: when it comes to androids, our best gauge of “human-like” may be how freaked out we are when we discover that the person we are speaking to is a robot.
http://singularityhub.com(...)ike-humanoid-robots/
"An educated citizenry is a vital requisite for our survival as a free people."
Nice! Laatst ook een docu gezien waarbij ze een rolstoel met gedachten besturen!
Mind-controlled robotic arm has skill and speed of human limb
LONDON (Reuters) - A paralyzed woman has been able to feed herself chocolate and move everyday items using a robotic arm directly controlled by thought, showing a level of agility and control approaching that of a human limb.
Jan Scheuermann, 53, from Pittsburgh, was diagnosed with a degenerative brain disorder 13 years ago and is paralyzed from the neck down.
"It's so cool," said Scheuermann during a news conference. "I'm moving things. I have not moved things for about 10 years ... It's not a matter of thinking which direction anymore it's just a matter of thinking ‘I want to do that'."
She was shown feeding herself string cheese and chocolate unaided as well as moving a series of objects in tests designed for recovering stroke victims, and she was able to do it with speeds comparable to the able bodied.
Experts are calling it a remarkable step forward for prosthetics controlled directly by the brain. Other systems have already allowed paralyzed patients to type or write in freehand simply by thinking about the letters they want.
In the past month, researchers in Switzerland also used electrodes implanted directly on the retina to enable a blind patient to read.
The development of brain-machine interfaces is moving quickly and scientists predict the technology could eventually be used to bypass nerve damage and re-awaken a person's own paralyzed muscles.
In the meantime, they say, systems like the one developed by the U.S. researchers could be paired with robotic "exoskeletons" that allow paraplegics and quadriplegics to walk.
For Scheuermann, the experience has already been transforming.
"It's given her a renewed purpose," Michael Boninger, who worked on the study published in The Lancet, told Reuters. "On the first day that we had her move the arm, there was this amazing smile of joy. She could think about moving her wrist and something happened."
COMPLEX ALGORITHM
The research team from the University of Pittsburgh Medical Center implanted two microelectrode devices into the woman's left motor cortex, the part of the brain that initiates movement.
The medics used a real-time brain scanning technique called functional magnetic resonance imaging to find the exact part of the brain that lit up after the patient was asked to think about moving her now unresponsive arms.
The electrodes were connected to the robotic hand via a computer running a complex algorithm to translate the signals that mimics the way an unimpaired brain controls healthy limbs.
"These electrodes are remarkable devices in that they are very small," Boninger said. "You can't buy them in Radio Shack."
But Boninger said the way the algorithm operates is the main advance. Accurately translating brain signals has been one of the biggest challenges in mind-controlled prosthetics.
"There is no limit now to decoding human motion," he said. "It gets more complex when you work on parts like the hand, but I think that, once you can tap into desired motion in the brain, then how that motion is effected has a wide range of possibilities."
It took weeks of training for Scheuermann to master control of the hand, but she was able to move it after just two days, and over time she completed tasks - such as picking up objects, orientating them, and moving them to a target position - with a 91.6 percent success rate. Her speed increased with practice.
The researchers plan to incorporate wireless technology to remove the need for a wired connection between the patient's head and the prosthesis.
They also believe a sensory loop could be added that gives feedback to the brain, allowing the user to tell the difference between hot and cold, or smooth and rough surfaces.
Grégoire Courtine, at the Swiss Federal Institute of Technology in Lausanne, hailed the project. "This bioinspired brain-machine interface is a remarkable technological and biomedical achievement."
"Though plenty of challenges lie ahead, these sorts of systems are rapidly approaching the point of clinical fruition," Courtine, who was not involved in the study, said in a comment piece in the Lancet linked to the study.
ETHICAL QUESTIONS
Although using technology to restore movement, sight or hearing in the disabled would for many seem uncontroversial, some disability rights groups and ethicists are wary.
They argue that restoring hearing, for instance, could fuel a prejudice that a deaf life is less rich, or less well lived.
Andy Miah, a professor at the University of the West of Scotland who has written extensively about human enhancement in the context of the Paralympics, says it is far from straightforward.
"For instance, a few years ago, there was a case of a deaf lesbian couple who sought to use in vitro fertilization to select for deafness," he said.
"They argued that absence of hearing is precisely not an impairment, but allows access to a rich community."
The ethics become more complex with the prospect of using these technologies to enhance the able-bodied.
"It's quite likely that therapy is the back door to enhancement in these kinds of technological interventions," says Miah. "People will question whether this is desirable, but we already live in a society that tolerates such modifications.
"Laser eye surgery interventions have grown astronomically over the last decade and nobody complains that it is making people superhuman."
http://news.yahoo.com/min(...)human-011916152.html
Mind-controlled robotic arm has skill and speed of human limb

LONDON (Reuters) - A paralyzed woman has been able to feed herself chocolate and move everyday items using a robotic arm directly controlled by thought, showing a level of agility and control approaching that of a human limb.
Jan Scheuermann, 53, from Pittsburgh, was diagnosed with a degenerative brain disorder 13 years ago and is paralyzed from the neck down.
"It's so cool," said Scheuermann during a news conference. "I'm moving things. I have not moved things for about 10 years ... It's not a matter of thinking which direction anymore it's just a matter of thinking ‘I want to do that'."
She was shown feeding herself string cheese and chocolate unaided as well as moving a series of objects in tests designed for recovering stroke victims, and she was able to do it with speeds comparable to the able bodied.
Experts are calling it a remarkable step forward for prosthetics controlled directly by the brain. Other systems have already allowed paralyzed patients to type or write in freehand simply by thinking about the letters they want.
In the past month, researchers in Switzerland also used electrodes implanted directly on the retina to enable a blind patient to read.
The development of brain-machine interfaces is moving quickly and scientists predict the technology could eventually be used to bypass nerve damage and re-awaken a person's own paralyzed muscles.
In the meantime, they say, systems like the one developed by the U.S. researchers could be paired with robotic "exoskeletons" that allow paraplegics and quadriplegics to walk.
For Scheuermann, the experience has already been transforming.
"It's given her a renewed purpose," Michael Boninger, who worked on the study published in The Lancet, told Reuters. "On the first day that we had her move the arm, there was this amazing smile of joy. She could think about moving her wrist and something happened."
COMPLEX ALGORITHM
The research team from the University of Pittsburgh Medical Center implanted two microelectrode devices into the woman's left motor cortex, the part of the brain that initiates movement.
The medics used a real-time brain scanning technique called functional magnetic resonance imaging to find the exact part of the brain that lit up after the patient was asked to think about moving her now unresponsive arms.
The electrodes were connected to the robotic hand via a computer running a complex algorithm to translate the signals that mimics the way an unimpaired brain controls healthy limbs.
"These electrodes are remarkable devices in that they are very small," Boninger said. "You can't buy them in Radio Shack."
But Boninger said the way the algorithm operates is the main advance. Accurately translating brain signals has been one of the biggest challenges in mind-controlled prosthetics.
"There is no limit now to decoding human motion," he said. "It gets more complex when you work on parts like the hand, but I think that, once you can tap into desired motion in the brain, then how that motion is effected has a wide range of possibilities."
It took weeks of training for Scheuermann to master control of the hand, but she was able to move it after just two days, and over time she completed tasks - such as picking up objects, orientating them, and moving them to a target position - with a 91.6 percent success rate. Her speed increased with practice.
The researchers plan to incorporate wireless technology to remove the need for a wired connection between the patient's head and the prosthesis.
They also believe a sensory loop could be added that gives feedback to the brain, allowing the user to tell the difference between hot and cold, or smooth and rough surfaces.
Grégoire Courtine, at the Swiss Federal Institute of Technology in Lausanne, hailed the project. "This bioinspired brain-machine interface is a remarkable technological and biomedical achievement."
"Though plenty of challenges lie ahead, these sorts of systems are rapidly approaching the point of clinical fruition," Courtine, who was not involved in the study, said in a comment piece in the Lancet linked to the study.
ETHICAL QUESTIONS
Although using technology to restore movement, sight or hearing in the disabled would for many seem uncontroversial, some disability rights groups and ethicists are wary.
They argue that restoring hearing, for instance, could fuel a prejudice that a deaf life is less rich, or less well lived.
Andy Miah, a professor at the University of the West of Scotland who has written extensively about human enhancement in the context of the Paralympics, says it is far from straightforward.
"For instance, a few years ago, there was a case of a deaf lesbian couple who sought to use in vitro fertilization to select for deafness," he said.
"They argued that absence of hearing is precisely not an impairment, but allows access to a rich community."
The ethics become more complex with the prospect of using these technologies to enhance the able-bodied.
"It's quite likely that therapy is the back door to enhancement in these kinds of technological interventions," says Miah. "People will question whether this is desirable, but we already live in a society that tolerates such modifications.
"Laser eye surgery interventions have grown astronomically over the last decade and nobody complains that it is making people superhuman."
http://news.yahoo.com/min(...)human-011916152.html
"An educated citizenry is a vital requisite for our survival as a free people."
Tendon Driven Humanoid Robot
Ook de zwitsers zijn bezig met een Life-Like Humanoid Robot.


Ook de zwitsers zijn bezig met een Life-Like Humanoid Robot.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen

"An educated citizenry is a vital requisite for our survival as a free people."
25-01-2013
Print je eigen robot met 3D-printer
Een Fransman geeft zijn ontwerpen en bouwinstructies vrij voor een robot die je kan maken met 3D-printers. Het ontwerp moet doe-het-zelvers InMoov-robots laten bouwen met makkelijk verkrijgbare en relatief goedkope onderdelen, meldt Tweakers.net.
De Franse beeldhouwer en modelmaker Gael Langevin heeft ongeveer een jaar gewerkt aan zijn robotontwerp. InMoov werd gedurende die tijd steeds verder verfijnd en kan inmiddels geprint worden volgens de instructies die Langevin op zijn blog zette.
De humanoïde robot bestaat uit een hoofd, torso en twee armen. Alle onderdelen worden middels servo's aangestuurd en InMoov kan bediend worden met de stem van de eigenaar.
(HLN)
Print je eigen robot met 3D-printer

Een Fransman geeft zijn ontwerpen en bouwinstructies vrij voor een robot die je kan maken met 3D-printers. Het ontwerp moet doe-het-zelvers InMoov-robots laten bouwen met makkelijk verkrijgbare en relatief goedkope onderdelen, meldt Tweakers.net.
De Franse beeldhouwer en modelmaker Gael Langevin heeft ongeveer een jaar gewerkt aan zijn robotontwerp. InMoov werd gedurende die tijd steeds verder verfijnd en kan inmiddels geprint worden volgens de instructies die Langevin op zijn blog zette.
De humanoïde robot bestaat uit een hoofd, torso en twee armen. Alle onderdelen worden middels servo's aangestuurd en InMoov kan bediend worden met de stem van de eigenaar.

(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
06-02-2013
Wetenschappers maken bionische mens
In Londen hebben wetenschappers een robot gepresenteerd die voor een groot gedeelte uit menselijke protheses bestaat. Met nagemaakte 'menselijke' onderdelen hopen de makers een volledig bionische robot te maken. De robot beschikt onder andere over een synthetisch hart.
De robot, die de naam Rex heeft gekregen, is ontwikkeld door de John Hopkins University in Baltimore en heeft tot nu toe ongeveer 1 miljoen dollar gekost. Volgens de makers is het de eerste bionische mens gebouwd uit protheses en synthetische organen. Rex beschikt onder andere over voet-, hand-, knie- en retina-protheses. Ook zijn er enkele inwendige organen ingebouwd, waaronder een kunstmatig hart dat zelfstandig kan functioneren.
In de toekomst willen de wetenschappers de bionische robot nog een aantal kunstmatige organen geven, waaronder een stel longen, een alvleesklier en een blaas. Het is nog onduidelijk wanneer Rex deze onderdelen zal ontvangen. Momenteel zou 60 tot 70 procent van de robot al uit nagemaakte menselijke onderdelen bestaan. Het zou echter nog niet mogelijk zijn om een mens in zijn geheel na te bouwen. Het is bijvoorbeeld nog niet mogelijk om de hersenen na te maken.
De wetenschappers verwachten niet dat er binnen afzienbare tijd een volledige functionerende mens nagebootst kan worden. Wel verwachten zij dat er binnen 10 jaar robots zullen bestaan die uit zichzelf een pen oppakken en ermee kunnen schrijven. Rex zal worden getoond in het Science Museum in Londen.
(tweakers.net)
Wetenschappers maken bionische mens
In Londen hebben wetenschappers een robot gepresenteerd die voor een groot gedeelte uit menselijke protheses bestaat. Met nagemaakte 'menselijke' onderdelen hopen de makers een volledig bionische robot te maken. De robot beschikt onder andere over een synthetisch hart.
De robot, die de naam Rex heeft gekregen, is ontwikkeld door de John Hopkins University in Baltimore en heeft tot nu toe ongeveer 1 miljoen dollar gekost. Volgens de makers is het de eerste bionische mens gebouwd uit protheses en synthetische organen. Rex beschikt onder andere over voet-, hand-, knie- en retina-protheses. Ook zijn er enkele inwendige organen ingebouwd, waaronder een kunstmatig hart dat zelfstandig kan functioneren.
In de toekomst willen de wetenschappers de bionische robot nog een aantal kunstmatige organen geven, waaronder een stel longen, een alvleesklier en een blaas. Het is nog onduidelijk wanneer Rex deze onderdelen zal ontvangen. Momenteel zou 60 tot 70 procent van de robot al uit nagemaakte menselijke onderdelen bestaan. Het zou echter nog niet mogelijk zijn om een mens in zijn geheel na te bouwen. Het is bijvoorbeeld nog niet mogelijk om de hersenen na te maken.
De wetenschappers verwachten niet dat er binnen afzienbare tijd een volledige functionerende mens nagebootst kan worden. Wel verwachten zij dat er binnen 10 jaar robots zullen bestaan die uit zichzelf een pen oppakken en ermee kunnen schrijven. Rex zal worden getoond in het Science Museum in Londen.

(tweakers.net)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
08-02-2013
Badmintonrobot verhoogt efficiency
Het Flanders’ Mechatronics Technology Centre (FMTC) in het Belgische Heverlee heeft naar eigen zeggen de eerste robot ter wereld ontwikkeld, die in staat is om badminton te spelen.
Erg spectaculair ziet het langs een rail bewegende apparaat er niet uit en eigenlijk doet het er ook niet toe hoe nauwkeurig de automaat een shuttle kan retourneren. Het onderzoeksteam onder leiding van dr. Wim Symens heeft de sportieve robot vooral ontworpen om na te gaan hoe de energie-efficiëntie van het gebruikte computerprogramma te verbeteren valt. Het energieverbruik blijkt met vijftig procent omlaag te kunnen. Inmiddels heeft onder meer een producent van weefmachines belangstelling voor de ontwikkelde software getoond.
(technischweekblad.nl)
Badmintonrobot verhoogt efficiency
Het Flanders’ Mechatronics Technology Centre (FMTC) in het Belgische Heverlee heeft naar eigen zeggen de eerste robot ter wereld ontwikkeld, die in staat is om badminton te spelen.
Erg spectaculair ziet het langs een rail bewegende apparaat er niet uit en eigenlijk doet het er ook niet toe hoe nauwkeurig de automaat een shuttle kan retourneren. Het onderzoeksteam onder leiding van dr. Wim Symens heeft de sportieve robot vooral ontworpen om na te gaan hoe de energie-efficiëntie van het gebruikte computerprogramma te verbeteren valt. Het energieverbruik blijkt met vijftig procent omlaag te kunnen. Inmiddels heeft onder meer een producent van weefmachines belangstelling voor de ontwikkelde software getoond.
(technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
11-02-2013
Exotherme reactie laat siliconen stuiteren
Harvard-onderzoekers hebben een robot bedacht die zich voortbeweegt dankzij explosies in zijn binnenste. Angewandte Chemie bericht over deze verrassende nieuwe toepassing van siliconenrubber, waarvan het nut helaas niet helemaal duidelijk is.
Dat het siliconenrubber het nog overleeft ook, is wellicht de opvallendste conclusie van George Whitesides (toch al een van de meest geciteerde chemici ter wereld) en collega’s.
De ‘zachte robot’ heeft de vorm van een driepuntige ster. De ‘benen’ zijn hol, en kunnen via leidingen worden gevuld met een mengsel van methaan en zuurstof. Via elektrische draden kun je vervolgens in een been naar keuze een vonk genereren die het gasmengsel laat reageren tot koolstofdioxide en water. Door de knal springt de robot minstens 30 cm de lucht in.
Dat dit functioneert heeft alles te maken met terugslagklepjes, die eveneens van silicium zijn gemaakt. Tijdens de explosie worden ze dichtgedrukt door de overdruk. Als daarna door afkoeling de druk weer terugloopt, gaat de klep weer open en laat de afgassen uit.
Volgens de onderzoekers kan zo’n ster minstens 30 sprongen achter elkaar maken zonder dat het siliconenrubber het door de hitte begeeft.
Volgens de nieuwsredactie van Nature dromen de onderzoekers al van een sterk vergrote versie voor reddingsoperaties in ruw terrein. Het idee is dan dat je hem over obstakels heen laat springen.
bron: news@nature
(c2w.nl)
Exotherme reactie laat siliconen stuiteren

Harvard-onderzoekers hebben een robot bedacht die zich voortbeweegt dankzij explosies in zijn binnenste. Angewandte Chemie bericht over deze verrassende nieuwe toepassing van siliconenrubber, waarvan het nut helaas niet helemaal duidelijk is.
Dat het siliconenrubber het nog overleeft ook, is wellicht de opvallendste conclusie van George Whitesides (toch al een van de meest geciteerde chemici ter wereld) en collega’s.
De ‘zachte robot’ heeft de vorm van een driepuntige ster. De ‘benen’ zijn hol, en kunnen via leidingen worden gevuld met een mengsel van methaan en zuurstof. Via elektrische draden kun je vervolgens in een been naar keuze een vonk genereren die het gasmengsel laat reageren tot koolstofdioxide en water. Door de knal springt de robot minstens 30 cm de lucht in.
Dat dit functioneert heeft alles te maken met terugslagklepjes, die eveneens van silicium zijn gemaakt. Tijdens de explosie worden ze dichtgedrukt door de overdruk. Als daarna door afkoeling de druk weer terugloopt, gaat de klep weer open en laat de afgassen uit.
Volgens de onderzoekers kan zo’n ster minstens 30 sprongen achter elkaar maken zonder dat het siliconenrubber het door de hitte begeeft.
Volgens de nieuwsredactie van Nature dromen de onderzoekers al van een sterk vergrote versie voor reddingsoperaties in ruw terrein. Het idee is dan dat je hem over obstakels heen laat springen.
bron: news@nature
(c2w.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
25-02-2013
Academici stellen gebruik van "dodelijke robots" in vraag
Mensenrechtenorganisaties en academici bereiden een campagne voor tegen het gebruik van "dodelijke robots" in oorlogsvoering, dat bericht de Amerikaanse technologiesite Wired. "In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid", klinkt het onder andere. De tegenstanders vinden het gebruik van de toestellen bovendien weinig legaal en transparant.
"In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid. Vooral jongemannen die heel goed videospelletjes kunnen spelen, maken kans om aangenomen te worden, aldus initiatiefnemer Noel Sharkey, professor robotica aan de universiteit van Sheffield. Sharkey klaagt ook de manier van werken aan: "De mannen houden een zwerm robots in de gaten, terwijl ze zelf amper gecontroleerd worden".
"Het is een branche waar heel veel geld mee gemoeid is", vervolgt hij, "maar er is een groot gebrek aan transparantie en legaliteit". "Mensen zijn denkende wezens met gevoelens. Wie zal aansprakelijk worden gesteld als het met een robot misloopt?", stelt de professor in vraag. "Zeker niet de robot."
De campagne kwam eind vorig jaar voor het eerst ter sprake na de bekendmaking van een rapport over oorlogsvoering met robots. De publicatie pleitte onder andere voor de stopzetting van de praktijk, alvorens ze algemeen gangbaar wordt. Ook drukkingsgroepen, activisten, andere academici en Jody Williams, die in 1997 de Nobelprijs voor de Vrede won, zetten hun schouders onder het initiatief.
De campagne gaat in april van start in het Britse Lagerhuis.
(HLN)
Academici stellen gebruik van "dodelijke robots" in vraag

Mensenrechtenorganisaties en academici bereiden een campagne voor tegen het gebruik van "dodelijke robots" in oorlogsvoering, dat bericht de Amerikaanse technologiesite Wired. "In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid", klinkt het onder andere. De tegenstanders vinden het gebruik van de toestellen bovendien weinig legaal en transparant.
"In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid. Vooral jongemannen die heel goed videospelletjes kunnen spelen, maken kans om aangenomen te worden, aldus initiatiefnemer Noel Sharkey, professor robotica aan de universiteit van Sheffield. Sharkey klaagt ook de manier van werken aan: "De mannen houden een zwerm robots in de gaten, terwijl ze zelf amper gecontroleerd worden".
"Het is een branche waar heel veel geld mee gemoeid is", vervolgt hij, "maar er is een groot gebrek aan transparantie en legaliteit". "Mensen zijn denkende wezens met gevoelens. Wie zal aansprakelijk worden gesteld als het met een robot misloopt?", stelt de professor in vraag. "Zeker niet de robot."
De campagne kwam eind vorig jaar voor het eerst ter sprake na de bekendmaking van een rapport over oorlogsvoering met robots. De publicatie pleitte onder andere voor de stopzetting van de praktijk, alvorens ze algemeen gangbaar wordt. Ook drukkingsgroepen, activisten, andere academici en Jody Williams, die in 1997 de Nobelprijs voor de Vrede won, zetten hun schouders onder het initiatief.
De campagne gaat in april van start in het Britse Lagerhuis.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
27-02-2013
Wetenschappers bouwen robotische vleermuisvleugel
Wat Batman kan, kunnen wetenschappers ook! Onderzoekers van Brown University hebben een heuse robotische vleermuisvleugel gebouwd.
De onderzoekers lieten zich voor de bouw van de vleugel inspireren door de grote vleermuis, of de vleerhond. De vleugel kan in een windtunnel op en neer klappen en genoeg kracht leveren om het luchtruim te kiezen en de luchtweerstand te weerstaan.
Experimenteren
De onderzoekers ontwikkelden de robotische vleugel om meer te weten te komen over hoe vleermuizen vliegen. Wanneer de vleugel actief is, kunnen de onderzoekers tal van gegevens verzamelen die echte vleermuizen ze niet kunnen geven. “We kunnen een vleermuis niet vragen om met een frequentie van acht hertz met de vleugels te klappen en vervolgens de frequentie op te schroeven naar negen hertz, zodat we kunnen kijken of dat een verschil maakt,” legt onderzoeker Joseph Bahlman uit. “Vleermuizen werken zo niet.” De robotische vleugel daarentegen wel: deze doet precies wat de onderzoekers willen. “We kunnen vragen beantwoorden als: ‘Zorgt het frequenter klappen met de vleugels ervoor dat deze gemakkelijker opstijgen en hoeveel energie kost het om vaker met de vleugels te slaan?’.”
Fouten maken
Het ontwikkelen van de vleugel heeft de onderzoekers al veel opgeleverd. “We hebben veel over vleermuizen geleerd door hun vleugels na te maken en daarbij ook fouten te maken. Zo braken bepaalde ‘gewrichten’ van de robotvleugel herhaaldelijk af. Door deze te omwinden met staalkabel kon dat voorkomen worden: net zoals gewrichtsbanden dat bij echte vleermuizen voorkomen.
De onderzoekers zetten hun experiment met de robotische vleugel voort. “We zouden graag nog andere materialen voor de vleugel willen proberen,” vertelt Bahlman. De onderzoekers hopen dat het uiteindelijk informatie zal opleveren die we kunnen gebruiken voor het ontwerpen van kleine, zeer efficiënte vliegtuigen.
(Scientias.nl)
Wetenschappers bouwen robotische vleermuisvleugel

Wat Batman kan, kunnen wetenschappers ook! Onderzoekers van Brown University hebben een heuse robotische vleermuisvleugel gebouwd.
De onderzoekers lieten zich voor de bouw van de vleugel inspireren door de grote vleermuis, of de vleerhond. De vleugel kan in een windtunnel op en neer klappen en genoeg kracht leveren om het luchtruim te kiezen en de luchtweerstand te weerstaan.
Experimenteren
De onderzoekers ontwikkelden de robotische vleugel om meer te weten te komen over hoe vleermuizen vliegen. Wanneer de vleugel actief is, kunnen de onderzoekers tal van gegevens verzamelen die echte vleermuizen ze niet kunnen geven. “We kunnen een vleermuis niet vragen om met een frequentie van acht hertz met de vleugels te klappen en vervolgens de frequentie op te schroeven naar negen hertz, zodat we kunnen kijken of dat een verschil maakt,” legt onderzoeker Joseph Bahlman uit. “Vleermuizen werken zo niet.” De robotische vleugel daarentegen wel: deze doet precies wat de onderzoekers willen. “We kunnen vragen beantwoorden als: ‘Zorgt het frequenter klappen met de vleugels ervoor dat deze gemakkelijker opstijgen en hoeveel energie kost het om vaker met de vleugels te slaan?’.”
Fouten maken
Het ontwikkelen van de vleugel heeft de onderzoekers al veel opgeleverd. “We hebben veel over vleermuizen geleerd door hun vleugels na te maken en daarbij ook fouten te maken. Zo braken bepaalde ‘gewrichten’ van de robotvleugel herhaaldelijk af. Door deze te omwinden met staalkabel kon dat voorkomen worden: net zoals gewrichtsbanden dat bij echte vleermuizen voorkomen.
De onderzoekers zetten hun experiment met de robotische vleugel voort. “We zouden graag nog andere materialen voor de vleugel willen proberen,” vertelt Bahlman. De onderzoekers hopen dat het uiteindelijk informatie zal opleveren die we kunnen gebruiken voor het ontwerpen van kleine, zeer efficiënte vliegtuigen.
(Scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Big Dog is terug met upgrades
Hij kan nu als een echte hond je stok terughalen....of jou gooien
Hij kan nu als een echte hond je stok terughalen....of jou gooien

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
01-02-2013
Amerikaans leger laat sterke robot op 'menselijke manier' gooien
Het Amerikaanse leger heeft een sterke wandelende robot uitgerust met een arm waardoor het apparaat op een 'menselijke manier' kan gooien.
Foto: NU.nl Bekijk video
De BigDog, zoals de robot door ontwikkelaar Boston Dynamics genoemd is, is al sinds 2005 in ontwikkeling en wordt gefinancierd door het Amerikaanse leger.
De robot is 91 centimeter lang, 76 centimeter hoog en weegt 110 kilo. Het apparaat kan 6,5 kilometer per uur lopen en is in staat 150 kilo te tillen. De kracht en snelheid van de BigDog moet overigens nog verbeterd worden.
De robot kan zich door de vier poten met aparte sensoren gemakkelijk verplaatsten over moeilijk begaanbaar terrein. Deze poten bevatten drie computergestuurde gewrichten die 500 keer per seconde van positie kunnen veranderen.
Uit een filmpje dat door Boston Dynamics online is gezet, blijkt dat de BigDog nu ook een arm heeft waarmee hij in de video een betonblok optilt en weggooit.
"Het doel is technologieën te ontwikkelen die de kracht van de benen en torso gebruiken voor de beweging van de arm", aldus Boston Dynamics. "Deze benadering wordt door menselijke atleten al gebruikt en moet de prestaties van robots verbeteren."
Door: NU.nl/Colin van Hoek
(klik hier voor video)
(nu.nl)
Amerikaans leger laat sterke robot op 'menselijke manier' gooien
Het Amerikaanse leger heeft een sterke wandelende robot uitgerust met een arm waardoor het apparaat op een 'menselijke manier' kan gooien.

Foto: NU.nl Bekijk video
De BigDog, zoals de robot door ontwikkelaar Boston Dynamics genoemd is, is al sinds 2005 in ontwikkeling en wordt gefinancierd door het Amerikaanse leger.
De robot is 91 centimeter lang, 76 centimeter hoog en weegt 110 kilo. Het apparaat kan 6,5 kilometer per uur lopen en is in staat 150 kilo te tillen. De kracht en snelheid van de BigDog moet overigens nog verbeterd worden.
De robot kan zich door de vier poten met aparte sensoren gemakkelijk verplaatsten over moeilijk begaanbaar terrein. Deze poten bevatten drie computergestuurde gewrichten die 500 keer per seconde van positie kunnen veranderen.
Uit een filmpje dat door Boston Dynamics online is gezet, blijkt dat de BigDog nu ook een arm heeft waarmee hij in de video een betonblok optilt en weggooit.
"Het doel is technologieën te ontwikkelen die de kracht van de benen en torso gebruiken voor de beweging van de arm", aldus Boston Dynamics. "Deze benadering wordt door menselijke atleten al gebruikt en moet de prestaties van robots verbeteren."
Door: NU.nl/Colin van Hoek
(klik hier voor video)
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
...
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
quote:MIT ‘cheetah’ robot rivals running animals in efficiency
Robot’s custom-designed electric motors are powerful and efficient.
A 70-pound “cheetah” robot designed by MIT researchers may soon outpace its animal counterparts in running efficiency: In treadmill tests, the researchers have found that the robot — about the size and weight of an actual cheetah — wastes very little energy as it trots continuously for up to an hour and a half at 5 mph. The key to the robot’s streamlined stride: lightweight electric motors, set into its shoulders, that produce high torque with very little heat wasted.
The motors can be programmed to quickly adjust the robot’s leg stiffness and damping ratio — or cushioning — in response to outside forces such as a push, or a change in terrain. The researchers will present the efficiency results and design principles for their electric motor at the International Conference on Robotics and Automation in May.
Sangbae Kim, the Esther and Harold E. Edgerton Assistant Professor in MIT’s Department of Mechanical Engineering, says achieving energy-efficiency in legged robots has proven extremely difficult. Robots such as Boston Dynamic’s “Big Dog” carry heavy gasoline engines and hydraulic transmissions, while other electrically powered robots require large battery packs, gears, force sensors and springs to coordinate the joints in a robot’s leg. All this weighty machinery can add up to significant wasted energy, particularly when a robot’s legs need to make frequent contact with the ground in order to trot or gallop.
“In order to send a robot to find people or perform emergency tasks, like in the Fukushima disaster, you want it to be autonomous,” Kim says. “If it could run for more than two hours and search a large field, that would be useful. But one of the reasons why people think it’s impossible to make an electric robot that does this is because efficiencies have been pretty bad.”
Kim adds that part of the challenge in powering running machines with electric motors is that such robots require a flexible response upon impact, and high power, torque and efficiency — characteristics that have historically been difficult to achieve with electric motors.
To understand how an electrically powered system might waste little energy while running, the researchers first looked at general sources of energy loss in running robots. They found that most wasted energy comes from three sources: heat given off by a motor; energy dissipated through mechanical transmission, such as losses to friction through multiple gear trains; and inefficient control, such as energy lost through a heavy-footed step, as opposed to a smoother and more gentle gait.
The group then came up with design principles to minimize such energy waste. To combat heat loss from motors, the group proposed a high-torque-density motor — a motor that produces a significant amount of torque at a given weight and heat production. The team analyzed the relationship between motor size and torque, and designed custom motors that exceed the torque performance of commercially available electric motors.
The team found that such high-torque motors require fewer gears — a characteristic that would improve efficiency even more, as there would be less machinery through which energy could dissipate. Many researchers have used springs and dampers in series with motors to protect the robot from forceful impacts during locomotion, but it’s difficult to control a spring’s stiffness and damping ratio — which can be a problem if a robot has to traverse disparate surfaces, such as asphalt and sand.
“With our system, we can make our robotic leg behave like a spring or damper without having physical springs, dampers or force sensors,” Kim says.
Kim is the Esther and Harold E. Edgerton Assistant Professor in MIT’s Department of Mechanical Engineering. Photo: M. Scott Brauer
In addition to heat given off by a motor, the group found that another major source of energy loss comes from the force of impact as a robot’s leg hits the ground. Such forces can be strong enough to shake a machine and potentially cause damage. Engineers need to use dampers, or shock absorbers, to minimize shaking and stabilize such systems. But Kim says such dampers act to dissipate energy each time a leg meets the ground.
In contrast, the cheetah-bot’s electric motors capture this energy, feeding it back to the system to further power the robot.
“The majority of impact energy goes back to the battery because the damping is created by custom-designed electric control of the motor,” Kim says. “[The motor] regenerates energy that would have been lost.”
Kim adds that mounting motors and gears at the hip joint would also reduce energy loss by minimizing leg inertia: Some legged robots are designed with motors and gearboxes at each joint along a leg, which can be cumbersome and can lose more energy at every impact. With Kim’s design, 85 percent of the weight of the leg is concentrated at the hip joint, keeping the rest of the leg relatively lightweight.
The researchers also attached strips of Kevlar to connect sections of the robot’s legs, simulating the structure of tendons along a bone. The Kevlar strengthens the leg with little additional weight, and further reduces the leg’s inertia. The group also constructed a flexible spine out of rings of polyurethane rubber, sandwiched between vertebra-like segments. Kim hypothesizes that the spine moves along with the rear legs, and can store elastic energy while galloping.
To test the efficiency of the robot, the researchers ran it on a treadmill at a steady 5-mph clip. They measured the voltage and current of the battery, as well as that from each motor. They calculated the robot’s efficiency of locomotion — also known as cost of transport — and found that it was more efficient than robotic competitors such as Big Dog and Honda’s two-legged robot, ASIMO.
After digging through the literature on animal locomotion, the researchers plotted the cost of transport of various running, flying and swimming animals. They found that, not surprisingly, fliers were more efficient than runners, although swimmers were the most efficient movers. The cheetah robot, according to Kim’s calculations, falls around the efficiency range of humans, cheetahs and hunting dogs.
Currently the team is assembling a set of new motors, designed by Jeffrey Lang, a professor of electrical engineering at MIT. Kim expects that once the group outfits the robot with improved motors, the cheetah robot will be able to gallop at speeds of up to 35 mph, with an efficiency that rivals even fliers. The researchers are convinced that this approach can exceed biological muscle in many aspects, including power, torque and responsiveness.
“There are so many ways to design, and each legged robot has a different system,” Kim says. “If you design the motor properly, it’s more powerful, simpler robotics.”
Ron Fearing, a professor of electrical engineering and computer science at the University of California at Berkeley, says that simple springs can work well in small robots running on smooth terrain. But for rougher, more unpredictable terrain, he says the energy-recovery system of the MIT cheetah has big advantages.
“The cheetah robot has really pushed the technology in efficient motor design, low-loss transmissions, and low-inertia legs,” says Fearing, who did not contribute to the research. “By combining these with the regenerative motor drive system, so that mechanical energy from the leg can recharge the battery, that in my opinion has made a huge difference in efficiency, [and] an important step forward in making efficient, electrically driven running robots.”
In addition to Kim and Lang, the paper’s co-authors include Sangok Seok, Albert Wang, Meng Yee Chuah and David Otten, all of MIT.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
11-03-2013
Ook robots beschikken nu over hun eigen internet
Wanneer wij iets niet weten, zoeken we het op op het internet. En nu kunnen robots hetzelfde doen. Onderzoekers hebben een internet voor robots gecreëerd waar onze stalen vrienden informatie op kwijt kunnen en informatie af kunnen halen.
Robots komen we nu al op tal van plekken tegen. Een mooi voorbeeld zijn de robots die geheel zelfstandig ons huis stofzuigen. De robots zijn al tot heel wat in staat: zo weten ze precies welk stukje van het huis ze al gestofzuigd hebben en welk deel ze nog moeten doen. Ook niet onbelangrijk: de robotstofzuigers weten ook wanneer ze zich moeten opladen en doen dat vervolgens zelfstandig. Het is indrukwekkend, maar dit zijn eigenlijk nog maar hele simpele robots die simpele taken uitvoeren.
Intelligenter
In de toekomst willen onderzoeker robots gaan ontwikkelen die veel meer kunnen. Bijvoorbeeld robots die ons eten kunnen bereiden en het bij ons kunnen brengen. Maar hoe ingewikkelder de robot, hoe meer geheugen en computerkracht deze ook nodig heeft. Daarom zullen deze robots zwaar en duur zijn en niet zo snel op grote schaal geproduceerd en gebruikt gaan worden. Om dat te voorkomen, hebben onderzoekers nu een internet voor robots ontwikkeld.
In de cloud
Het internet heeft verschillende functies. Zo stelt het robots in staat om een deel van hun verwerkingsprocessen in de cloud te doen. Dat betekent dat ze lokaal niet meer zoveel geheugen nodig hebben en informatie toch supersnel (vaak zelfs sneller dan met een lokaal geheugen) kunnen verwerken.
Leren
Maar het internet biedt robots ook de gelegenheid om van elkaar te leren en informatie met elkaar te delen. Zo kan een robotstofzuiger bijvoorbeeld een kaart maken van de woonkamer die een andere robot vervolgens weer kan gebruiken wanneer deze door de kamer wandelt om zijn huisgenoten ontbijt te brengen. Robots hoeven dus niet elke keer opnieuw het wiel uit te vinden. In plaats daarvan bouwen ze op de informatie die hun ‘collega’s’ reeds hebben verzameld, zo stellen de onderzoekers in hun paper.
De onderzoekers verwachten dat robots dankzij hun eigen internet lichter, goedkoper en intelligenter worden. Ze hebben het internet voor robots de naam Rapyuta gegeven
(scientias.nl)
Ook robots beschikken nu over hun eigen internet

Wanneer wij iets niet weten, zoeken we het op op het internet. En nu kunnen robots hetzelfde doen. Onderzoekers hebben een internet voor robots gecreëerd waar onze stalen vrienden informatie op kwijt kunnen en informatie af kunnen halen.
Robots komen we nu al op tal van plekken tegen. Een mooi voorbeeld zijn de robots die geheel zelfstandig ons huis stofzuigen. De robots zijn al tot heel wat in staat: zo weten ze precies welk stukje van het huis ze al gestofzuigd hebben en welk deel ze nog moeten doen. Ook niet onbelangrijk: de robotstofzuigers weten ook wanneer ze zich moeten opladen en doen dat vervolgens zelfstandig. Het is indrukwekkend, maar dit zijn eigenlijk nog maar hele simpele robots die simpele taken uitvoeren.
Intelligenter
In de toekomst willen onderzoeker robots gaan ontwikkelen die veel meer kunnen. Bijvoorbeeld robots die ons eten kunnen bereiden en het bij ons kunnen brengen. Maar hoe ingewikkelder de robot, hoe meer geheugen en computerkracht deze ook nodig heeft. Daarom zullen deze robots zwaar en duur zijn en niet zo snel op grote schaal geproduceerd en gebruikt gaan worden. Om dat te voorkomen, hebben onderzoekers nu een internet voor robots ontwikkeld.
In de cloud
Het internet heeft verschillende functies. Zo stelt het robots in staat om een deel van hun verwerkingsprocessen in de cloud te doen. Dat betekent dat ze lokaal niet meer zoveel geheugen nodig hebben en informatie toch supersnel (vaak zelfs sneller dan met een lokaal geheugen) kunnen verwerken.
Leren
Maar het internet biedt robots ook de gelegenheid om van elkaar te leren en informatie met elkaar te delen. Zo kan een robotstofzuiger bijvoorbeeld een kaart maken van de woonkamer die een andere robot vervolgens weer kan gebruiken wanneer deze door de kamer wandelt om zijn huisgenoten ontbijt te brengen. Robots hoeven dus niet elke keer opnieuw het wiel uit te vinden. In plaats daarvan bouwen ze op de informatie die hun ‘collega’s’ reeds hebben verzameld, zo stellen de onderzoekers in hun paper.
De onderzoekers verwachten dat robots dankzij hun eigen internet lichter, goedkoper en intelligenter worden. Ze hebben het internet voor robots de naam Rapyuta gegeven

(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
De professor die min of meer de leiding heeft over dit project krijgt soms van die mailtjes van die gekken die denken dat we skynet aan het oprichten zijn en bedreigen hem danquote:
11-03-2013
Ook robots beschikken nu over hun eigen internet
[ afbeelding ]
Wanneer wij iets niet weten, zoeken we het op op het internet. En nu kunnen robots hetzelfde doen. Onderzoekers hebben een internet voor robots gecreëerd waar onze stalen vrienden informatie op kwijt kunnen en informatie af kunnen halen.
Robots komen we nu al op tal van plekken tegen. Een mooi voorbeeld zijn de robots die geheel zelfstandig ons huis stofzuigen. De robots zijn al tot heel wat in staat: zo weten ze precies welk stukje van het huis ze al gestofzuigd hebben en welk deel ze nog moeten doen. Ook niet onbelangrijk: de robotstofzuigers weten ook wanneer ze zich moeten opladen en doen dat vervolgens zelfstandig. Het is indrukwekkend, maar dit zijn eigenlijk nog maar hele simpele robots die simpele taken uitvoeren.
Intelligenter
In de toekomst willen onderzoeker robots gaan ontwikkelen die veel meer kunnen. Bijvoorbeeld robots die ons eten kunnen bereiden en het bij ons kunnen brengen. Maar hoe ingewikkelder de robot, hoe meer geheugen en computerkracht deze ook nodig heeft. Daarom zullen deze robots zwaar en duur zijn en niet zo snel op grote schaal geproduceerd en gebruikt gaan worden. Om dat te voorkomen, hebben onderzoekers nu een internet voor robots ontwikkeld.
In de cloud
Het internet heeft verschillende functies. Zo stelt het robots in staat om een deel van hun verwerkingsprocessen in de cloud te doen. Dat betekent dat ze lokaal niet meer zoveel geheugen nodig hebben en informatie toch supersnel (vaak zelfs sneller dan met een lokaal geheugen) kunnen verwerken.
Leren
Maar het internet biedt robots ook de gelegenheid om van elkaar te leren en informatie met elkaar te delen. Zo kan een robotstofzuiger bijvoorbeeld een kaart maken van de woonkamer die een andere robot vervolgens weer kan gebruiken wanneer deze door de kamer wandelt om zijn huisgenoten ontbijt te brengen. Robots hoeven dus niet elke keer opnieuw het wiel uit te vinden. In plaats daarvan bouwen ze op de informatie die hun ‘collega’s’ reeds hebben verzameld, zo stellen de onderzoekers in hun paper.
De onderzoekers verwachten dat robots dankzij hun eigen internet lichter, goedkoper en intelligenter worden. Ze hebben het internet voor robots de naam Rapyuta gegeven
(scientias.nl)
Simpele zielen zijn dat. Blijft bizar hoeveel invloed een film kan hebben.quote:Op woensdag 13 maart 2013 23:47 schreef Dale. het volgende:
[..]
De professor die min of meer de leiding heeft over dit project krijgt soms van die mailtjes van die gekken die denken dat we skynet aan het oprichten zijn en bedreigen hem dan
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
16-03-2013
Shell experimenteert met scholen robotvisjes
De onderwaterwereld in de Golf van Mexico zal dit jaar worden opgeschrikt door scholen robotvisjes. Shell test de potentie van autonoom opererende minionderzeeërs, uitgerust met seismische sensoren, in de zoektocht naar nieuwe olie- en gasvelden.
Nu nog gaat seismisch onderzoek op zee met schepen die kilometerslange meetkabels achter zich aanslepen. Het schip zendt met een luchtkanon akoestische signalen uit en microfoons in de meetkabels nemen het teruggekaatste signaal op. Aan de hand van het patroon van uitdoving onder verschillende hoeken van terugkaatsing is te bepalen wat zich in de ondergrond bevindt.
Het proces zou veel gemakkelijker verlopen zonder de polsdikke sleepkabels, die tientallen tonnen wegen. Shell investeerde daarom in de techniek van het Britse bedrijf Go Science, dat een efficiënt opererende school onderwaterrobots ontwierp.
Honderden, of zelfs duizenden robotjes navigeren ieder naar hun eigen plek op de zeebodem en vormen samen een sensornetwerk. Onder water communiceren de robots alleen met elkaar en enkele zogenaamde surface nodes, die aan het wateroppervlak blijven en gps-signalen (die niet onder water doordringen) omzetten in sonar. Als het moederschip zijn luchtkanon afvuurt, nemen de robotvisjes de uit de ondergrond teruggekaatste geluidssignalen op en slaan deze data op. Ze kunnen meerdere keren van positie wisselen, voor ze terug moeten naar het moederschip, waar de data worden uitgelezen.
Volgens Go Science halveert de techniek de duur en de kosten van onderzeese seismische expedities. Bovendien kan het onderzoek nu onder ijs plaatsvinden, wat beter seismisch onderzoek in het poolgebied mogelijk maakt.
De techniek zorgt ook voor nieuwe uitdagingen, vertelt Wim Walk, hoofd van de afdeling Novel Geophysical Measurement Technologies in het huisblad Shell Venster. ‘De snelheidswinst betekent óók dat er meer schepen nodig zijn en meer airguns die je simultaan moet afschieten. Dat levert een nieuwe it-uitdaging op, want om mogelijke interferentie van signalen tegen te gaan, heb je complexere software en scheidingsfilters nodig.’
(technisckweekblad.nl)
Shell experimenteert met scholen robotvisjes

De onderwaterwereld in de Golf van Mexico zal dit jaar worden opgeschrikt door scholen robotvisjes. Shell test de potentie van autonoom opererende minionderzeeërs, uitgerust met seismische sensoren, in de zoektocht naar nieuwe olie- en gasvelden.
Nu nog gaat seismisch onderzoek op zee met schepen die kilometerslange meetkabels achter zich aanslepen. Het schip zendt met een luchtkanon akoestische signalen uit en microfoons in de meetkabels nemen het teruggekaatste signaal op. Aan de hand van het patroon van uitdoving onder verschillende hoeken van terugkaatsing is te bepalen wat zich in de ondergrond bevindt.
Het proces zou veel gemakkelijker verlopen zonder de polsdikke sleepkabels, die tientallen tonnen wegen. Shell investeerde daarom in de techniek van het Britse bedrijf Go Science, dat een efficiënt opererende school onderwaterrobots ontwierp.
Honderden, of zelfs duizenden robotjes navigeren ieder naar hun eigen plek op de zeebodem en vormen samen een sensornetwerk. Onder water communiceren de robots alleen met elkaar en enkele zogenaamde surface nodes, die aan het wateroppervlak blijven en gps-signalen (die niet onder water doordringen) omzetten in sonar. Als het moederschip zijn luchtkanon afvuurt, nemen de robotvisjes de uit de ondergrond teruggekaatste geluidssignalen op en slaan deze data op. Ze kunnen meerdere keren van positie wisselen, voor ze terug moeten naar het moederschip, waar de data worden uitgelezen.
Volgens Go Science halveert de techniek de duur en de kosten van onderzeese seismische expedities. Bovendien kan het onderzoek nu onder ijs plaatsvinden, wat beter seismisch onderzoek in het poolgebied mogelijk maakt.
De techniek zorgt ook voor nieuwe uitdagingen, vertelt Wim Walk, hoofd van de afdeling Novel Geophysical Measurement Technologies in het huisblad Shell Venster. ‘De snelheidswinst betekent óók dat er meer schepen nodig zijn en meer airguns die je simultaan moet afschieten. Dat levert een nieuwe it-uitdaging op, want om mogelijke interferentie van signalen tegen te gaan, heb je complexere software en scheidingsfilters nodig.’
(technisckweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

libelle-copter

Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
31-03-2013
Minirobots tonen aan hoe 'oerdomme' mieren weg vinden in ingewikkeld nest
© thinkstock.
Wetenschappers hebben minirobots ontwikkeld om het koloniegedrag van mieren te imiteren. Ze willen zo onderzoeken hoe de insecten hun weg vinden in een nest, meldt Tweakers.net.
Mierennesten bestaan namelijk uit een uitgebreid stelsel van gangen waarin mieren zich zowel verticaal als horizontaal moeten oriënteren. De dieren hebben echter nauwelijks hersencapaciteit, maar navigeren met de hulp van feromonen. Dat zijn signaalstoffen die het lichaam afscheidt, vergelijkbaar met hormonen.
Onderzoekers uit het Amerikaanse Newark en het Franse Toulouse hebben samen een robotsysteem ontwikkeld dat het gedrag van mieren imiteert. De minirobots, zo groot als een suikerklontje, gebruiken lichtpatronen in plaats van feromonen die opgepikt kunnen worden met twee sensoren.
Lichtspoor
In een experiment werden de minirobots zo ingesteld dat ze een lichtspoor volgden wanneer ze dat tegenkwamen. Er bleken geen verdere programmeertrucs nodig om de minirobots hun weg te laten vinden in een gangenstelsel, vergelijkbaar met de wijze waarop een mierenkolonie werkt.
Volgens de wetenschappers toont hun systeem aan dat mieren met minimale hersencapaciteit hun weg kunnen vinden in een ingewikkeld gangenstelsel. Hoewel het onderzoek niet direct praktische implicaties heeft, wordt vaak naar de natuur gekeken om systemen te optimaliseren.
(HLN)
Minirobots tonen aan hoe 'oerdomme' mieren weg vinden in ingewikkeld nest

© thinkstock.
Wetenschappers hebben minirobots ontwikkeld om het koloniegedrag van mieren te imiteren. Ze willen zo onderzoeken hoe de insecten hun weg vinden in een nest, meldt Tweakers.net.
Mierennesten bestaan namelijk uit een uitgebreid stelsel van gangen waarin mieren zich zowel verticaal als horizontaal moeten oriënteren. De dieren hebben echter nauwelijks hersencapaciteit, maar navigeren met de hulp van feromonen. Dat zijn signaalstoffen die het lichaam afscheidt, vergelijkbaar met hormonen.
Onderzoekers uit het Amerikaanse Newark en het Franse Toulouse hebben samen een robotsysteem ontwikkeld dat het gedrag van mieren imiteert. De minirobots, zo groot als een suikerklontje, gebruiken lichtpatronen in plaats van feromonen die opgepikt kunnen worden met twee sensoren.
Lichtspoor
In een experiment werden de minirobots zo ingesteld dat ze een lichtspoor volgden wanneer ze dat tegenkwamen. Er bleken geen verdere programmeertrucs nodig om de minirobots hun weg te laten vinden in een gangenstelsel, vergelijkbaar met de wijze waarop een mierenkolonie werkt.
Volgens de wetenschappers toont hun systeem aan dat mieren met minimale hersencapaciteit hun weg kunnen vinden in een ingewikkeld gangenstelsel. Hoewel het onderzoek niet direct praktische implicaties heeft, wordt vaak naar de natuur gekeken om systemen te optimaliseren.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
31-03-2013quote:
Robot vliegt zoals libelle
Het Duitse bedrijf Festo heeft een robot gemaakt die vliegt als een libelle. De BionicOpter kan in alle richtingen bewegen, en ook stilhangen in de lucht. Dat is een hele prestatie, want de vliegbewegingen van libelles zijn erg complex.
Het is mogelijk de libelle te besturen met een smartphone, al stuurt de robot dan zelf bij waar nodig. Elke vleugel, het hoofd en de staart worden door de processor apart aangestuurd, meldt Tweakers.net.
Het robotdiertje weegt 175 gram en heeft een lichaamslengte van 48 cm. De vleugels bestaan uit een frame van koolstofvezels met een dunne folie van plastic. In de ribbenkast bevindt zich een accu, negen stappenmotoren en een ARM-microcontroller met sensoren en draadloze modules. Het is niet bekendgemaakt hoe lang de accu meegaat.
Vermoedelijk gaat de robot niet verkocht worden omdat hij werd ontwikkeld in het kader van het Bionic Learning Network-programma van het bedrijf. Eerder maakte Festo al een robotversie van onder andere een vogel, een olifantenslurf en een vliegende pinguin.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
02-04-2013
robot krijgt armen en handen
De Duitse humanoïde robot TORO (TOrque controlled humanoid Robot), heeft armen en handen gekregen.
TORO heeft armen en handen (Copyright: DLR)
De robot begon in 2009 als twee benen met hier bovenop een camera gemonteerd, maar is door de jaren steeds verder uitgegroeid. Eerder kreeg TORO ook al een bovenlichaam en een hoofd met daarin camera-ogen.
TORO is een looprobot van het DLR die onderzoekers inzicht moet geven in hoe deze technologie verder te ontwikkelen. De robot is niet erg snel; bijzonder is juist dat TORO opmerkelijk kleine voeten heeft. Dit maakt de looprobot minder stabiel, wat het lopen moeilijker maakt, maar volgens de onderzoekers kan TORO hierdoor gemakkelijk over obstakels heen klimmen. De toevoeging van een bovenlichaam, een hoofd en armen maken het lopen echter een nog grotere uitdaging voor de robot.
De onderzoekers willen TORO niet gebruiken om hem bepaalde taken aan te leren, wat bij dergelijke robots meestal wel het geval is, maar ze willen dat hun looprobot zich vooral leert bewijzen door meteen uit de voeten te kunnen in een onbekende omgeving. Flexibele gewrichten en sensoren in armen en handen moeten nieuwe inzichten opleveren.
Looprobot TORO is compleet. (Copyright: DLR)
Met zijn nieuwe armen en handen moet TORO ook andere proeven uit gaan voeren waarbij processen die mensen vaak onbewust doen in kaart worden gebracht. ‘Als personen bijvoorbeeld een zware deur openen, dan doen ze dat in een dynamisch proces’, vertelt DLR-medewerker Christian Ott. ‘Ze weten onbewust welke bewegingen er nodig zijn. Onze robot zou dit ook moeten kunnen.’ Om hier achter te komen, heeft TORO onder meer een sensor in de romp, die registreert hoe de versnelling en rotatiesnelheid van het bovenlichaam zijn bij een dergelijke actie. Ook moet TORO leren traplopen, waarbij de robot zichzelf vasthoudt aan de trapleuning.
(technischweekblad.nl)
robot krijgt armen en handen
De Duitse humanoïde robot TORO (TOrque controlled humanoid Robot), heeft armen en handen gekregen.

TORO heeft armen en handen (Copyright: DLR)
De robot begon in 2009 als twee benen met hier bovenop een camera gemonteerd, maar is door de jaren steeds verder uitgegroeid. Eerder kreeg TORO ook al een bovenlichaam en een hoofd met daarin camera-ogen.
TORO is een looprobot van het DLR die onderzoekers inzicht moet geven in hoe deze technologie verder te ontwikkelen. De robot is niet erg snel; bijzonder is juist dat TORO opmerkelijk kleine voeten heeft. Dit maakt de looprobot minder stabiel, wat het lopen moeilijker maakt, maar volgens de onderzoekers kan TORO hierdoor gemakkelijk over obstakels heen klimmen. De toevoeging van een bovenlichaam, een hoofd en armen maken het lopen echter een nog grotere uitdaging voor de robot.
De onderzoekers willen TORO niet gebruiken om hem bepaalde taken aan te leren, wat bij dergelijke robots meestal wel het geval is, maar ze willen dat hun looprobot zich vooral leert bewijzen door meteen uit de voeten te kunnen in een onbekende omgeving. Flexibele gewrichten en sensoren in armen en handen moeten nieuwe inzichten opleveren.

Looprobot TORO is compleet. (Copyright: DLR)
Met zijn nieuwe armen en handen moet TORO ook andere proeven uit gaan voeren waarbij processen die mensen vaak onbewust doen in kaart worden gebracht. ‘Als personen bijvoorbeeld een zware deur openen, dan doen ze dat in een dynamisch proces’, vertelt DLR-medewerker Christian Ott. ‘Ze weten onbewust welke bewegingen er nodig zijn. Onze robot zou dit ook moeten kunnen.’ Om hier achter te komen, heeft TORO onder meer een sensor in de romp, die registreert hoe de versnelling en rotatiesnelheid van het bovenlichaam zijn bij een dergelijke actie. Ook moet TORO leren traplopen, waarbij de robot zichzelf vasthoudt aan de trapleuning.
(technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

Wow! Creepy! Maar wat een vooruitgang weer ten opzichte van de vorige versie.quote:
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Even een mooi artikeltje wat ik wil delen:
quote:
The difference between people and machine will blur as we trek through the decades ahead.
As we move into the late 2030s and 2040s, the most salient scenario is that we will merge with our technology gradually, not overnight. We may not experience a single great leap like a “Singularity;” instead, we could see many small steps as we slowly become more machine-like.
AI/Robots will eventually surpass human levels of intelligence and develop ability to self-replicate, increasing intelligence with each succeeding generation. This will produce an information explosion almost beyond imagination.
Our bodies will also evolve during this time. We will use nanobots to kill pathogens and cancer cells, then go into our brain and do benign things like enhance memory. Slowly, these nanobots will become more sophisticated.
We will direct these ‘smart bots’ to convert biological neurons into powerful non-biological ones, and rewrite our brain’s ‘software’. This will allow us to connect with machines and share their super-intelligence.
Eventually, every cell in our body will become non-biological, and our silicon-based minds will not only be able to interface seamlessly with machines, but will also easily connect with one another utilizing thought communications.
As robots develop new abilities, we will incorporate those abilities into our makeup. As the years unfold, we will become more machine-like and robots more human-like, the difference between human and machine will blur.
By century’s end, the merge could be complete; we would become a single species. And although our minds and bodies will be considered non-biological, our consciousness will forever preserve our definition as a human being.
The journey into this human-machine future will take place one benign, safe change at a time, beginning in late 2030s and ending sometime during the last half of this century.
Are you ready to live in a ‘cyborg’ world? I’ll admit it would certainly take some getting used to, but should this octogenarian writer survive the decades ahead; I say welcome to our human-machine future!

I only tell you once. Don't fuck me, Tony. Don't you ever try to fuck me.
^ Het is altijd fascinerend om zulke toekomstbeelden voor je te zien. Helemaal als je verder gaat denken. Stel de mens is idd half robot ergens rond 2060. Hoe ziet de wereld er dan uit in 2100? En dan in 2200? 3000? 6000? Dat is niet voor te stellen. Is dit misschien de laatste eeuw waarin 'de normale mens' nog bestaat? Als de ontwikkelingen echt altijd exponentieel blijven gaan. Ze we dan compleet uit ontwikkeld in, zeg, het jaar 10.000?
Ik denk dus dat een beschaving op een gegeven moment aan zijn einde komt. Niet eens door een ramp ofzo maar gewoon...Als je nagaat dat de dino's miljoenen jaren leefde, dan kan ik me niet voorstellen in wat voor stadium een intelligente beschaving zou zijn na zo'n periode.
Onsterfelijkheid, ruimteschepen, teleportatie, het kunnen maken van materie en leven...zijn allemaal zaken die ik me voorstel voor het jaar 3000 bijvoorbeeld. Daarna houdt mijn fantasie gewoon op, laat staan wat er in het jaar 10.000 gebeurd...
[ Bericht 12% gewijzigd door Eyjafjallajoekull op 08-04-2013 12:10:21 ]
Ik denk dus dat een beschaving op een gegeven moment aan zijn einde komt. Niet eens door een ramp ofzo maar gewoon...Als je nagaat dat de dino's miljoenen jaren leefde, dan kan ik me niet voorstellen in wat voor stadium een intelligente beschaving zou zijn na zo'n periode.
Onsterfelijkheid, ruimteschepen, teleportatie, het kunnen maken van materie en leven...zijn allemaal zaken die ik me voorstel voor het jaar 3000 bijvoorbeeld. Daarna houdt mijn fantasie gewoon op, laat staan wat er in het jaar 10.000 gebeurd...
[ Bericht 12% gewijzigd door Eyjafjallajoekull op 08-04-2013 12:10:21 ]
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
De komende tientallen jaren worden super interessant. Ik denk dat wij onszelf met kunstmatige intelligentie intelligenter gaan maken en met deze hogere intelligentie kunnen wij ons dingen verbeelden en mogelijkheden zien waar wij nu nooit op zouden komen. Wat ben ik blij dat ik nog jong ben.quote:
^ Het is altijd fascinerend om zulke toekomstbeelden voor je te zien. Helemaal als je verder gaat denken. Stel de mens is idd half robot ergens rond 2060. Hoe ziet de wereld er dan uit in 2100? En dan in 2200? 3000? 6000? Dat is niet voor te stellen. Is dit misschien de laatste eeuw waarin 'de normale mens' nog bestaat? Als de ontwikkelingen echt altijd exponentieel blijven gaan. Ze we dan compleet uit ontwikkeld in, zeg, het jaar 10.000?
Ik denk dus dat een beschaving op een gegeven moment aan zijn einde komt. Niet eens door een ramp ofzo maar gewoon...Als je nagaat dat de dino's miljoenen jaren leefde, dan kan ik me niet voorstellen in wat voor stadium een intelligente beschaving zou zijn na zo'n periode.
Onsterfelijkheid, ruimteschepen, teleportatie, het kunnen maken van materie en leven...zijn allemaal zaken die ik me voorstel voor het jaar 3000 bijvoorbeeld. Daarna houdt mijn fantasie gewoon op, laat staan wat er in het jaar 10.000 gebeurd...
Dat verhaaltje klinkt heel leuk maar is echt totale larie koek, duidelijk geschreven door iemand zonder echte kennis van zaken en alleen de headlines volgt lijkt het. Naar mijn mening mogen wij echt blij zijn als wij bijvoorbeeld in 2050 een potje voetbal kunnen spelen tegen echte voetballers laat staan het WK winnen zoals het Robocup als visie heeft. Hoewel het AI gedeelte daarbij waarschijnlijk veel minder interessant is, maar meer het mechanische
Echte AI bestaat hedendaags nog niet. Veel mensen vinden wat neurale netwerken gecombineerd met iteratieve learning methods of reinforcement learning en state machientjes al AI maar het is gewoon fake eigenlijk. Wij programeren nog steeds wat de robot moet doen. We geven programeren het alleen abstracter aan wat hij moet doen.
Maar ook qua mechanica moeten veel stappen gezet worden. Motoren moeten bv. veel kleiner gemaakt worden zodat het design van zo'n robot veel flexiebeler gemaakt kan worden en dus veel meer vrijheidsgraden heeft dan de huidige generatie maar tegelijkertijd moeten deze ook weer immense kracht kunnen leveren. Deze twee dingen, klein + veel kracht werken elkaar gewoon ontzettend tegen.
Echte AI bestaat hedendaags nog niet. Veel mensen vinden wat neurale netwerken gecombineerd met iteratieve learning methods of reinforcement learning en state machientjes al AI maar het is gewoon fake eigenlijk. Wij programeren nog steeds wat de robot moet doen. We geven programeren het alleen abstracter aan wat hij moet doen.
Maar ook qua mechanica moeten veel stappen gezet worden. Motoren moeten bv. veel kleiner gemaakt worden zodat het design van zo'n robot veel flexiebeler gemaakt kan worden en dus veel meer vrijheidsgraden heeft dan de huidige generatie maar tegelijkertijd moeten deze ook weer immense kracht kunnen leveren. Deze twee dingen, klein + veel kracht werken elkaar gewoon ontzettend tegen.
Wauw, het is totale lariekoek.... Dat is nogal een stellige uitspraak, die je vervolgens nogal karig onderbouwt.quote:
Dat verhaaltje klinkt heel leuk maar is echt totale larie koek, duidelijk geschreven door iemand zonder echte kennis van zaken en alleen de headlines volgt lijkt het. Naar mijn mening mogen wij echt blij zijn als wij bijvoorbeeld in 2050 een potje voetbal kunnen spelen tegen echte voetballers laat staan het WK winnen zoals het Robocup als visie heeft. Hoewel het AI gedeelte daarbij waarschijnlijk veel minder interessant is, maar meer het mechanische
Echte AI bestaat hedendaags nog niet. Veel mensen vinden wat neurale netwerken gecombineerd met iteratieve learning methods of reinforcement learning en state machientjes al AI maar het is gewoon fake eigenlijk. Wij programeren nog steeds wat de robot moet doen. We geven programeren het alleen abstracter aan wat hij moet doen.
Maar ook qua mechanica moeten veel stappen gezet worden. Motoren moeten bv. veel kleiner gemaakt worden zodat het design van zo'n robot veel flexiebeler gemaakt kan worden en dus veel meer vrijheidsgraden heeft dan de huidige generatie maar tegelijkertijd moeten deze ook weer immense kracht kunnen leveren. Deze twee dingen, klein + veel kracht werken elkaar gewoon ontzettend tegen.
Ik neem Ray Kurzweil, die in principe hetzelfde zegt, toch een stuk serieuzer dan iemand die niet eens weet hoe je programmeren en flexibeler spelt.
"An educated citizenry is a vital requisite for our survival as a free people."
Ik zou het geen lariekoek noemen.
Of de AI fake is of niet... dat is een hele andere discussie dan robotica. In mijn ogen is reinforcement learning pure AI; mensen leren ook dingen met vallen en opstaan. Natuurlijk worden een aantal dingen geprogrammeerd in de robot, maar jij en ik zijn ook door onze ouders gemaakt. Ik zou het geen reinforcement learning noemen als letterlijk alles is geprogrammeerd.
Ik denk zelf dat 2050 nog te dichtbij is voor volwaardig robotvoetbal. AI op zo'n grote en complexe schaal ligt nog niet voorhanden.
Of de AI fake is of niet... dat is een hele andere discussie dan robotica. In mijn ogen is reinforcement learning pure AI; mensen leren ook dingen met vallen en opstaan. Natuurlijk worden een aantal dingen geprogrammeerd in de robot, maar jij en ik zijn ook door onze ouders gemaakt. Ik zou het geen reinforcement learning noemen als letterlijk alles is geprogrammeerd.
Ik denk zelf dat 2050 nog te dichtbij is voor volwaardig robotvoetbal. AI op zo'n grote en complexe schaal ligt nog niet voorhanden.
Praten we in 2050 verder. Ik werk dagelijks met robots op de universiteit en doe ondermeer onderzoek naar machine learning en robotica voor robot earth waar ik in dit topic al eerder over berichte. Dit en de bijbehorende theorie die niet eens compleet is zo complex dat t, denk ik, echt niet er dan al is.quote:
[..]
Wauw, het is totale lariekoek.... Dat is nogal een stellige uitspraak, die je vervolgens nogal karig onderbouwt.
Ik neem Ray Kurzweil, die in principe hetzelfde zegt, toch een stuk serieuzer dan iemand die niet eens weet hoe je programmeren en flexibeler spelt.
Daarnaast nanobots klinkt leuk maar je hebt nog steeds te maken met t menselijk lichaam dat ze ook gewoon kan verstoten. Laten we eerst een nanobot maken die zich door het gehele bloedstelsel kan verplaatsen op commando en dan verder kijken.
Sowieso is t hele nanobots gedoe puur futuristisch gedoe opgepikt van films. Maar ach... Van wat ik lees van Ray Kurzweil is het ook een futurist; die mensen hebben het heeeeeel vaak fout en een aantal van hen hebben het heeeeel soms goed. Sommige dingen zullen best mogelijk zijn maar zeker niet in t tijdsbestek wat hij noemt. Daarnaast klinkt t vanuit mijn invalshoek ook te sciencefiction achtig.
Mensen denken graag dat we altijd technisch zullen blijven evolueren (en dat het onmogelijke, mogelijk is) net zoals heel veel mensen denken dat de wetenschap met een GOED antwoord komt op het energie probleem. Het tegenovergestelde is echter waar.
Ikzelf geloof er ook niet in dat we ooit echte AI kunnen creeëren een robot zal altijd kennis uitputten van wat hij ergens heeft opgepikt en dus in zij database heeft staan, bv. als de robot gelooft in Sinterklaas zal hij er altijd erin blijven geloven en niet denken of op de vraag komen: zou Sinterklaas misschien een bedrieger zijn? Tenzij het ergens oppikt.
Bij reinforcement learning tuned hij enkel de parameters waarmee hij de motoren moet aansturen om te lopen hé... Dat hij moet gaan lopen en hoe lopen 'gedefinieerd' is, als in niet omvallen en vooruitbewegen, staat gewoon geprogrammeerd in zijn geheugen. Het is eigenlijk gewoon bruteforcing. Kijken hoe de robot reageert op bepaalde parameters en dan op een slimme manier door naar de error signaal en model te kijken hoe je nieuwe slimmere/betere parameters kunt kiezen.quote:
Ik zou het geen reinforcement learning noemen als letterlijk alles is geprogrammeerd.
[ Bericht 17% gewijzigd door Dale. op 09-04-2013 11:44:18 ]
Ik studeer nu af voor mijn Master AI, en mijn onderzoeksproject heeft te maken met reinforcement learning.quote:
Bij reinforcement learning tuned hij enkel de parameters waarmee hij de motoren moet aansturen om te lopen hé... Dat hij moet gaan lopen en hoe lopen 'gedefinieerd' is, als in niet omvallen en vooruitbewegen, staat gewoon geprogrammeerd in zijn geheugen. Het is eigenlijk gewoon bruteforcing. Kijken hoe de robot reageert op bepaalde parameters en dan op een slimme manier door naar de error signaal en model te kijken hoe je nieuwe slimmere/betere parameters kunt kiezen.
Ik ben ook geen fan van Ray Kurzweil. Het voelt soms alsof ie leukraak dingen schreeuwt en dat de media maar al te gretig het overneemt.. want kijk..terminator wordt in reality in 2050..!
Wat ik wel denk is dat jij en ik een andere definitie van 'AI' hebben. Ik vind AI al 'intelligent' als het zelf iets kan vinden. Dat we dan vervolgens gewoon het probleem zelf opstellen en beschrijven hoe parameters een oplossing formuleert voor het probleem... dat hoort er gewoon bij.
Het grappige is dat mensen IN het werkveld vaak een tunnelvisie krijgen op den duur met weinig fantasie.
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Ik begon ook met dromen van mijn eigen bedrijf dat dienstverlening doet dmv een paar AI algoritmes. Naarmate je meer snapt, realiseer je gewoon goed hoeveel je moet doen en dat het vele dingen nog niet echt zijn behandeld...quote:
Het grappige is dat mensen IN het werkveld vaak een tunnelvisie krijgen op den duur met weinig fantasie.
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Merk het zelf ook ja. Helaas.... Je moet heel erg uitkijken dat je niet steeds verder in een tunnel gaat zitten want op een gegeven moment wordt je een cynische ouwe zakquote:
[..]
Ik begon ook met dromen van mijn eigen bedrijf dat dienstverlening doet dmv een paar AI algoritmes. Naarmate je meer snapt, realiseer je gewoon goed hoeveel je moet doen en dat het vele dingen nog niet echt zijn behandeld...
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Ja iddquote:
Het grappige is dat mensen IN het werkveld vaak een tunnelvisie krijgen op den duur met weinig fantasie.
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Jack Andraka is daar een mooi voorbeeld van. Een 15-jarige die nog "niet wist wat grote bedrijven wel zogenaamd wisten" en daarom in staat was te komen tot een enorme doorbraak in de strijd tegen kanker:
Jack Andraka — 15-Year-Old Invents Cancer Test 100 Times More Sensitive & 26,000 Times Cheaper than Current Tests
http://www.bradaronson.com/jack-andraka/
"An educated citizenry is a vital requisite for our survival as a free people."
18-04-2013
Nieuwe robot helpt uw IKEA-meubel in elkaar te zetten
Het is altijd een hele beproeving: de meubels van een Zweedse meubelwarengigant in elkaar zetten. Wetenschappers hebben nu een robot ontwikkeld die een handje kan helpen. De robot is niet geprogrammeerd om dat te doen, maar leert het gaandeweg.
Een robot die een handje helpt bij het in elkaar zetten van meubels: dat is handig! Maar het heeft weinig zin om de robot voor elk stukje van de vele meubels die het Zweedse meubelhuis in het assortiment heeft, een handeling te leren. Daarom hebben de onderzoekers een robot ontwikkeld die leert door middel van demonstraties.
“Eén gebruiker grijpt de robot en beweegt deze om te demonstreren hoe deze met de andere gebruiker zou moeten samenwerken,” zo leggen de onderzoekers uit. Met behulp van sensoren en camera’s kan de robot ‘voelen’ en ‘zien’ wat hij doet. “Na de demonstratie leert de robot dat deze eerst meegaand moet zijn, zodat de gebruiker het tafelblad neer kan leggen om de poten erop te schroeven.” Zodra de gebruiker de poot vast gaat schroeven, is de robot niet langer meegaand, maar houdt hij het tafelblad stevig vast (zie onderstaand filmpje).
Het idee van een robot die leert door demonstratie is niet helemaal nieuw. Zo heeft deze robot bijvoorbeeld leren tafeltennissen door naar mensen te kijken. Maar de robot die mensen assisteert bij het in elkaar zetten van meubels is toch bijzonder. Mede omdat hij zo goed is ingespeeld op de mens, waardoor de samenwerking heel natuurlijk en efficiënt verloopt.
(scientias.nl)
Nieuwe robot helpt uw IKEA-meubel in elkaar te zetten

Het is altijd een hele beproeving: de meubels van een Zweedse meubelwarengigant in elkaar zetten. Wetenschappers hebben nu een robot ontwikkeld die een handje kan helpen. De robot is niet geprogrammeerd om dat te doen, maar leert het gaandeweg.
Een robot die een handje helpt bij het in elkaar zetten van meubels: dat is handig! Maar het heeft weinig zin om de robot voor elk stukje van de vele meubels die het Zweedse meubelhuis in het assortiment heeft, een handeling te leren. Daarom hebben de onderzoekers een robot ontwikkeld die leert door middel van demonstraties.
“Eén gebruiker grijpt de robot en beweegt deze om te demonstreren hoe deze met de andere gebruiker zou moeten samenwerken,” zo leggen de onderzoekers uit. Met behulp van sensoren en camera’s kan de robot ‘voelen’ en ‘zien’ wat hij doet. “Na de demonstratie leert de robot dat deze eerst meegaand moet zijn, zodat de gebruiker het tafelblad neer kan leggen om de poten erop te schroeven.” Zodra de gebruiker de poot vast gaat schroeven, is de robot niet langer meegaand, maar houdt hij het tafelblad stevig vast (zie onderstaand filmpje).

Het idee van een robot die leert door demonstratie is niet helemaal nieuw. Zo heeft deze robot bijvoorbeeld leren tafeltennissen door naar mensen te kijken. Maar de robot die mensen assisteert bij het in elkaar zetten van meubels is toch bijzonder. Mede omdat hij zo goed is ingespeeld op de mens, waardoor de samenwerking heel natuurlijk en efficiënt verloopt.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Hey dit moet ik ff een vriendin van me tuippen
Die is op dit moment aan t promoveren op robotica, een zorgrobot!
Die is op dit moment aan t promoveren op robotica, een zorgrobot!
L'Amour menaçant:
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
TU/e?quote:
Hey dit moet ik ff een vriendin van me tuippen
Die is op dit moment aan t promoveren op robotica, een zorgrobot!
Nee vanuit Delft. Maar dit promoveren is in Limburg ergens.quote:
L'Amour menaçant:
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
24-04-2013
Robot bootst schildpadje na
De flipperbot heeft twee houten plankjes als flippers. © Georgia Tech Photo: Gary Meek.
Amerikaanse wetenschappers hebben een roboto ontwikkeld die zich op dezelfde manier beweegt als kleine zeeschildpadjes. De robot, die ze Flipperbot noemen, is nuttig voor voor zowel biologen als ingenieurs.
De machine werd gebouwd door een team van de universiteit van Georgia in de Verenigde Staten. Ze raakten geïnspireerd door de zeeschildpadden die jaarlijks uit hun eieren naar de zee kruipen. Dat doen ze zonder het zand te bewegen, waardoor ze niet uitglijden en relatief snel bij de zee komen. Die efficiënte manier van bewegen moest worden nagebootst door de robot.
De wetenschappers denken dat hun 'Flipperbot' veel toepassingen kent. De robot kan helpen om nieuwe voertuigen te ontwikkelen die zich gemakkelijk over moeilijke terreinen en zelfs door het water kunnen voortbewegen. Maar hij geeft ook inzicht in hoe schildpadden bewegen en zou zelfs kunnen helpen bij onderzoek naar de evolutie en de vraag hoe zeedieren landdieren werden.
Hoe de robot beweegt is in het filmpje hieronder te zien:
(HLN)
Robot bootst schildpadje na

De flipperbot heeft twee houten plankjes als flippers. © Georgia Tech Photo: Gary Meek.
Amerikaanse wetenschappers hebben een roboto ontwikkeld die zich op dezelfde manier beweegt als kleine zeeschildpadjes. De robot, die ze Flipperbot noemen, is nuttig voor voor zowel biologen als ingenieurs.
De machine werd gebouwd door een team van de universiteit van Georgia in de Verenigde Staten. Ze raakten geïnspireerd door de zeeschildpadden die jaarlijks uit hun eieren naar de zee kruipen. Dat doen ze zonder het zand te bewegen, waardoor ze niet uitglijden en relatief snel bij de zee komen. Die efficiënte manier van bewegen moest worden nagebootst door de robot.
De wetenschappers denken dat hun 'Flipperbot' veel toepassingen kent. De robot kan helpen om nieuwe voertuigen te ontwikkelen die zich gemakkelijk over moeilijke terreinen en zelfs door het water kunnen voortbewegen. Maar hij geeft ook inzicht in hoe schildpadden bewegen en zou zelfs kunnen helpen bij onderzoek naar de evolutie en de vraag hoe zeedieren landdieren werden.
Hoe de robot beweegt is in het filmpje hieronder te zien:

(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
23-04-2013
Protest tegen moordrobots (die nog niet bestaan)
© thinkstock.
Robots die helemaal zelfstandig en automatisch mensen doden, zijn iets van de toekomst, maar mensenrechtenorganisaties maken zich nu al zorgen. Ze beginnen in de Britse hoofdstad Londen een internationale campagne tegen de apparaten.
"Gewapende robots die doden zonder enige menselijke tussenkomst mogen nooit worden gebouwd'', vindt Steve Goose van Human Rights Watch (HRW). Volgens hem moet een mens altijd de laatste beslissing nemen over leven en dood op het slagveld.
Volgens mensenrechtenorganisaties overschrijden de 'moordmachines' een morele grens. De organisaties willen daarom bij voorbaat bij regeringen aandringen op een internationaal verbod op de apparaten die anders binnenkort het strijdperk kunnen betreden.
Schildwacht
Een voorloper van zo'n zelfstandige oorlogsrobot is de Zuid-Koreaanse SGR-1; een automatische 'schildwacht' met een mitrailleur die mensen kan opsporen en zelf richt. Een militair op afstand beslist echter nog wel of het apparaat het vuur moet openen.
Ook onbemande vliegtuigen zijn de afgelopen jaren sterk in opkomst. Maar ook die 'drones' zijn nog niet helemaal onafhankelijk, omdat een piloot op afstand beslist of een raket wel of niet wordt afgevuurd.
(HLN)
Protest tegen moordrobots (die nog niet bestaan)

© thinkstock.
Robots die helemaal zelfstandig en automatisch mensen doden, zijn iets van de toekomst, maar mensenrechtenorganisaties maken zich nu al zorgen. Ze beginnen in de Britse hoofdstad Londen een internationale campagne tegen de apparaten.
"Gewapende robots die doden zonder enige menselijke tussenkomst mogen nooit worden gebouwd'', vindt Steve Goose van Human Rights Watch (HRW). Volgens hem moet een mens altijd de laatste beslissing nemen over leven en dood op het slagveld.
Volgens mensenrechtenorganisaties overschrijden de 'moordmachines' een morele grens. De organisaties willen daarom bij voorbaat bij regeringen aandringen op een internationaal verbod op de apparaten die anders binnenkort het strijdperk kunnen betreden.
Schildwacht
Een voorloper van zo'n zelfstandige oorlogsrobot is de Zuid-Koreaanse SGR-1; een automatische 'schildwacht' met een mitrailleur die mensen kan opsporen en zelf richt. Een militair op afstand beslist echter nog wel of het apparaat het vuur moet openen.
Ook onbemande vliegtuigen zijn de afgelopen jaren sterk in opkomst. Maar ook die 'drones' zijn nog niet helemaal onafhankelijk, omdat een piloot op afstand beslist of een raket wel of niet wordt afgevuurd.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
03-05-2013
Robotvlieg is amper groter dan een echte
Wetenschappers van Harvard zijn erin geslaagd een robotvlieg te maken die amper groter is dan een echte. Het tuig, dat losjes gebaseerd is op het lichaam van de insecten, bestaat uit ultradunne laagjes van composietmaterialen die aan elkaar zijn geplakt.
De machine weegt amper 80 milligram maar is voor stroom nog wel afhankelijk van een externe krachtbron, waarmee ze verbonden is via een dun kabeltje.
Toch kan de robotvlieg opstijgen en elementaire vliegmanoeuvres uitvoeren. De makers denken dat het ding enkele minuten zou kunnen vliegen met een ingebouwde krachtbron, meldt Science.
Toepassingen
Een robotvlieg zou in rampgebieden naar overlevenden kunnen speuren, plaatsen kunnen onderzoeken waar mensen niet kunnen komen, in kapotte machines kunnen vliegen op zoek naar problemen of zelfs mensen kunnen bespioneren.
Toch is dat nog niet voor morgen, want de wetenschappers kampen nog met "ernstige miniaturisatieuitdagingen", zowel bij het bouwen van de robot als bij het maken van camera's en computers die minuscuul genoeg zijn.
(HLN)
Robotvlieg is amper groter dan een echte

Wetenschappers van Harvard zijn erin geslaagd een robotvlieg te maken die amper groter is dan een echte. Het tuig, dat losjes gebaseerd is op het lichaam van de insecten, bestaat uit ultradunne laagjes van composietmaterialen die aan elkaar zijn geplakt.
De machine weegt amper 80 milligram maar is voor stroom nog wel afhankelijk van een externe krachtbron, waarmee ze verbonden is via een dun kabeltje.
Toch kan de robotvlieg opstijgen en elementaire vliegmanoeuvres uitvoeren. De makers denken dat het ding enkele minuten zou kunnen vliegen met een ingebouwde krachtbron, meldt Science.
Toepassingen
Een robotvlieg zou in rampgebieden naar overlevenden kunnen speuren, plaatsen kunnen onderzoeken waar mensen niet kunnen komen, in kapotte machines kunnen vliegen op zoek naar problemen of zelfs mensen kunnen bespioneren.
Toch is dat nog niet voor morgen, want de wetenschappers kampen nog met "ernstige miniaturisatieuitdagingen", zowel bij het bouwen van de robot als bij het maken van camera's en computers die minuscuul genoeg zijn.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
10-05-2013
"I can't stand it": Robot vertelt je of je adem stinkt
© thinkstock.
Voor je naar een belangrijke vergadering of een spannende date vertrekt, controleer je best altijd even of je niet ruikt. Maar binnenkort val je daar niet langer vrienden of familie voor lastig, dan schakel je gewoon een robot in.
Het Japanse bedrijf CrazyLabo heeft in samenwerking met het Kitakyushu National College of Technology twee robots gebouwd: één die lijkt op een bulldog en één die lijkt op een vrouw. De robots gebruiken een sensor die bepaalde chemicaliën oppikt.
De robothond ruikt aan je voeten en als die echt stinken, valt het beestje om. Als ze normaal ruiken, zal het diertje zich ernaast vleien. Om je adem te checken, mag je in het gezicht van de vrouwelijke robot, die 'Kaori' (aroma) genoemd wordt, ademen. "Good, like citrus", zegt ze als je adem lekker ruikt. "Yuck! You have bad breath", "No way! I can't stand it!" en "Emergency taking place" roept ze iets minder subtiel uit als je adem stinkt.
Beelden van de robots kan je bekijken op de website Robots Insider.
(HLN)
"I can't stand it": Robot vertelt je of je adem stinkt

© thinkstock.
Voor je naar een belangrijke vergadering of een spannende date vertrekt, controleer je best altijd even of je niet ruikt. Maar binnenkort val je daar niet langer vrienden of familie voor lastig, dan schakel je gewoon een robot in.
Het Japanse bedrijf CrazyLabo heeft in samenwerking met het Kitakyushu National College of Technology twee robots gebouwd: één die lijkt op een bulldog en één die lijkt op een vrouw. De robots gebruiken een sensor die bepaalde chemicaliën oppikt.
De robothond ruikt aan je voeten en als die echt stinken, valt het beestje om. Als ze normaal ruiken, zal het diertje zich ernaast vleien. Om je adem te checken, mag je in het gezicht van de vrouwelijke robot, die 'Kaori' (aroma) genoemd wordt, ademen. "Good, like citrus", zegt ze als je adem lekker ruikt. "Yuck! You have bad breath", "No way! I can't stand it!" en "Emergency taking place" roept ze iets minder subtiel uit als je adem stinkt.
Beelden van de robots kan je bekijken op de website Robots Insider.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
10-05-2013
Minirobotjes injecteren in het oog kan blindheid voorkomen
© thinkstock.
Het lijkt sciencefiction, maar binnenkort kunnen dokters misschien wel piepkleine robotjes in de ogen injecteren die waarschuwen wanneer het zuurstofgehalte van het oog te laag is. Dat kan namelijk leiden tot blindheid. Dat staat te lezen op de nieuwssite Mashable.
Onder leiding van professor Bradley Nelson van het Zwitserse Instituut voor Technologie (ETH) in Zürich creëerden wetenschappers robotjes van amper 1 millimeter lang en een derde van een millimeter breed die door de glazige vloeistof van het oog kunnen gedirigeerd worden met behulp van externe magnetische velden.
De minirobotjes werden omhuld met een speciale verf die hen omtovert tot zuurstofsensors. Hoe meer zuurstof in het oog, hoe feller de robotjes gloeien. De toestelletjes zijn al met succes getest in water en de volgende stap is nu om ze op een echt oog te testen.
Wetenschappers hebben trouwens eerder al robotjes gemaakt die medicijnen kunnen toedienen of littekenweefsel kunnen verwijderen van het oog.
(HLN)
Minirobotjes injecteren in het oog kan blindheid voorkomen

© thinkstock.
Het lijkt sciencefiction, maar binnenkort kunnen dokters misschien wel piepkleine robotjes in de ogen injecteren die waarschuwen wanneer het zuurstofgehalte van het oog te laag is. Dat kan namelijk leiden tot blindheid. Dat staat te lezen op de nieuwssite Mashable.
Onder leiding van professor Bradley Nelson van het Zwitserse Instituut voor Technologie (ETH) in Zürich creëerden wetenschappers robotjes van amper 1 millimeter lang en een derde van een millimeter breed die door de glazige vloeistof van het oog kunnen gedirigeerd worden met behulp van externe magnetische velden.
De minirobotjes werden omhuld met een speciale verf die hen omtovert tot zuurstofsensors. Hoe meer zuurstof in het oog, hoe feller de robotjes gloeien. De toestelletjes zijn al met succes getest in water en de volgende stap is nu om ze op een echt oog te testen.
Wetenschappers hebben trouwens eerder al robotjes gemaakt die medicijnen kunnen toedienen of littekenweefsel kunnen verwijderen van het oog.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
29-05-2013
Robot voorspelt menselijke handelingen en schenkt bier
Een team van de universiteit van Cornell in New York heeft een robot gebouwd die kennis van standaard huishoudelijke activiteiten aanwendt om mensen te helpen met klusjes, inclusief het schenken van bier.
De robot gebruikt een Kinect-camera van Microsoft als sensor. Hij observeert de bewegingen van een individu en vergelijkt die dan met een videodatabase van bijna 120 doordeweekse huishoudelijke taken, zoals het plaatsen van voedsel in de microgolfoven of het poetsen van tanden.
Toekomst
Volgens Ashutosh Saxena, een van de computerwetenschappers die aan de robot werkte, is de sleutel tot het succes van het toestel het vermogen om de toekomst te voorspellen. Het is namelijk gemakkelijk een robot te maken die menselijke bewegingen volgt en daarop reageert, maar robots die enkel reageren op informatie uit het verleden kunnen zich klungelig gedragen.
Opmerkelijk
Hoewel menselijke handelingen simpel lijken, is het toch opmerkelijk hoe de robot een situatie zo kan analyseren dat hij weet of je je bier wil nemen of het boek ernaast. Een video van het team toont hoe de robot de bewegingen van mensen analyseert en daarop inspeelt.
(HLN)
Robot voorspelt menselijke handelingen en schenkt bier

Een team van de universiteit van Cornell in New York heeft een robot gebouwd die kennis van standaard huishoudelijke activiteiten aanwendt om mensen te helpen met klusjes, inclusief het schenken van bier.
De robot gebruikt een Kinect-camera van Microsoft als sensor. Hij observeert de bewegingen van een individu en vergelijkt die dan met een videodatabase van bijna 120 doordeweekse huishoudelijke taken, zoals het plaatsen van voedsel in de microgolfoven of het poetsen van tanden.
Toekomst
Volgens Ashutosh Saxena, een van de computerwetenschappers die aan de robot werkte, is de sleutel tot het succes van het toestel het vermogen om de toekomst te voorspellen. Het is namelijk gemakkelijk een robot te maken die menselijke bewegingen volgt en daarop reageert, maar robots die enkel reageren op informatie uit het verleden kunnen zich klungelig gedragen.
Opmerkelijk
Hoewel menselijke handelingen simpel lijken, is het toch opmerkelijk hoe de robot een situatie zo kan analyseren dat hij weet of je je bier wil nemen of het boek ernaast. Een video van het team toont hoe de robot de bewegingen van mensen analyseert en daarop inspeelt.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
quote:Team van wetenschappers bouwt robotpeuter
Het bedrijf Hanson Robotics is van plan een robotpeuter te maken. Hij zou de 'slimste robot' ter wereld moeten worden.
De robot heet Adam Z1 en zal in staat zijn om te spreken, met speelgoed te spelen, tekeningen te maken en te reageren met emotie, zo meldt iO9.
Voor het project heeft oprichter David Hanson meerdere specialisten op het gebied van technologie aangetrokken waaronder OpenCog Artificial General Intelligence(AGI)-oprichter Ben Goertzal.
Hanson zelf werkte al eerder aan robots, waaronder Einstein, Zeno, Robokind en Brina 48.
Wereldervaring
"Mijn doel is om AGI te creëren met een simpel menselijk niveau van begrip, maar met uiteindelijk een hoger niveau van algemene intelligentie", aldus Hanson. "Maar daarvoor moeten we kunstmatige intelligentie zo maken dat het de 'menselijke wereld' kan begrijpen. De enige manier waarop we dat kunnen doen, is door de robot een ruwe inschatting te laten maken van wat het is om mens te zijn door het mens te láten zijn."
Het team dat nu aan Adam Z1 werkt wil daarom de software van de robot gratis en open aanbieden aan iedereen, zodat anderen ook kunnen werken aan de algoritmes en het systeem kunnen verbeteren.
Hanson heeft het project op Indiegogo gezet en hoopt op die manier 300.000 dollar voor de eerste investering op te halen.

Nu
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Mooie docu waairn de laatste stand van zaken wordt gegeven mbt wat robots kunnen:
De laatste 8 minuten zijn niet te zien in de bovenstaande (die een betere kwaliteit heeft), maar wel in de onderstaande:

De laatste 8 minuten zijn niet te zien in de bovenstaande (die een betere kwaliteit heeft), maar wel in de onderstaande:

"An educated citizenry is a vital requisite for our survival as a free people."
28-07-2013
Robot Carl serveert drankjes in Duitse bar
© reuters.
De beroemdste barman van Duitsland is sinds kort niet meer menselijk. Carl is een robot, die probleemloos drankjes kan mixen voor zijn klanten in een bar in het Oost-Duitse Ilmenau.
© reuters.
Ben Schaefer is de maker van Carl. © reuters.
Carl is een creatie van Ben Schaefer, die al 23 jaar als ingenieur in de wereld van elektronica actief is. Hij gebruikte onderdelen van afgedankte industriële robots uit een Duits bedrijf en bouwde zo een uitbater voor de 'Robots Bar en Lounge'. De robot staat achter de toog en schenkt er drankjes in voor het menselijke personeel van de zaak. Negen klanten kunnen op de barstoeltjes plaatsnemen om Carl gezelschap te houden. De robot kan zelfs een kort gesprek voeren met zijn klanten, hoewel dat toch nog minder sprankelend klinkt dan de drankjes die hij serveert.
Een gordel met sensoren verzekert dat Carl in de smalle ruimte achter zijn toog tegen niets opbotst en geen drankjes morst. Schaefer stelt in een omschrijving van zijn bedrijf dat het zijn bedoeling is om robots die op mensen lijken dichter bij de realiteit te brengen en om aan te tonen dat sommige science fiction-scènes wel degelijk mogelijk zijn. In een echte bar is het bovendien eenvoudiger om het brein van Carl te testen dan in een laboratorium.
© reuters.
© reuters.
© reuters.
© reuters.
© reuters.
© reuters.
© reuters.
(HLN)
Robot Carl serveert drankjes in Duitse bar

© reuters.
De beroemdste barman van Duitsland is sinds kort niet meer menselijk. Carl is een robot, die probleemloos drankjes kan mixen voor zijn klanten in een bar in het Oost-Duitse Ilmenau.

© reuters.

Ben Schaefer is de maker van Carl. © reuters.
Carl is een creatie van Ben Schaefer, die al 23 jaar als ingenieur in de wereld van elektronica actief is. Hij gebruikte onderdelen van afgedankte industriële robots uit een Duits bedrijf en bouwde zo een uitbater voor de 'Robots Bar en Lounge'. De robot staat achter de toog en schenkt er drankjes in voor het menselijke personeel van de zaak. Negen klanten kunnen op de barstoeltjes plaatsnemen om Carl gezelschap te houden. De robot kan zelfs een kort gesprek voeren met zijn klanten, hoewel dat toch nog minder sprankelend klinkt dan de drankjes die hij serveert.
Een gordel met sensoren verzekert dat Carl in de smalle ruimte achter zijn toog tegen niets opbotst en geen drankjes morst. Schaefer stelt in een omschrijving van zijn bedrijf dat het zijn bedoeling is om robots die op mensen lijken dichter bij de realiteit te brengen en om aan te tonen dat sommige science fiction-scènes wel degelijk mogelijk zijn. In een echte bar is het bovendien eenvoudiger om het brein van Carl te testen dan in een laboratorium.

© reuters.

© reuters.

© reuters.

© reuters.

© reuters.

© reuters.

© reuters.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
04-07-2013
Terminator wordt werkelijkheid
Boston Dynamics heeft de pers een eerste blik gegund op Atlas, een angstaanjagend veel op de Terminator lijkende robot waarmee het in december 2013 de Robotics Challenge van DARPA wil winnen.
In deze wedstrijd moeten robots laten zien dat ze als hulpverleners kunnen optreden bij rampen.
Atlas is 1,88 m hoog, weegt 150 kg en moet in staat zijn zware ladingen over grote afstanden te tillen. Het hoofd – gemaakt door Carnegie Melon University in Pittsburgh – zit vol sensoren die de robot een driedimensionaal beeld van de ruimte om hem heen geven. De robot kan uitgerust worden met twee verschillende paren handen voor verschillende taken.
(technischweekblad.nl)
Terminator wordt werkelijkheid

Boston Dynamics heeft de pers een eerste blik gegund op Atlas, een angstaanjagend veel op de Terminator lijkende robot waarmee het in december 2013 de Robotics Challenge van DARPA wil winnen.
In deze wedstrijd moeten robots laten zien dat ze als hulpverleners kunnen optreden bij rampen.
Atlas is 1,88 m hoog, weegt 150 kg en moet in staat zijn zware ladingen over grote afstanden te tillen. Het hoofd – gemaakt door Carnegie Melon University in Pittsburgh – zit vol sensoren die de robot een driedimensionaal beeld van de ruimte om hem heen geven. De robot kan uitgerust worden met twee verschillende paren handen voor verschillende taken.
(technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Die titel Beetje jammer dat het altijd van die sensatie-zoekende koppen zijn, en het artikel ook niet echt van goede kwaliteit is.
Boston Dynamics doet zelf namelijk niet mee aan de challange. Zij maken alleen de robot, welke aan een stuk of 10 teams wordt gedoneerd.
Boston Dynamics doet zelf namelijk niet mee aan de challange. Zij maken alleen de robot, welke aan een stuk of 10 teams wordt gedoneerd.
05-09-2013
Japanse robot zet eerste stappen in de ruimte
© belga.
Een Japanse robot heeft als eerste in zijn soort een stap in de ruimte gezet. Kirobo werd begin augstus gelanceerd en ging enkele weken geleden een eerste keer buiten het ISS kijken.
© afp.
© afp.
Een kleine stap voor de mensheid, maar een grote sprong voor Kirobo. Het Japanse robotje heeft zijn ruimtedoop achter de rug. Op termijn moeten de androïdes - op mensen gelijkende robots - een partner worden tijdens lange ruimtemissies. Kirobo dankt zijn naam aan een combinatie van twee Japanse woorden die 'hoop' en 'robot' betekenen. Verschillende bedrijven werkten mee aan de robot, waaronder ook Toyota. Op 4 augustus lanceerde Japan Kirobo de ruimte in om zes dagen later het ISS te bereiken. Daar werd Kirobo op 21 augustus voor het eerst op verkenning gestuurd.
Over enkele maanden zal Kirobo vergezeld worden door een landgenoot. Koichi Wakata zal de eerste Japanse bevelvoerder van ISS worden. Kirobo zal zijn gelaatsuitdrukkingen herkennen en is gemaakt om in het Japans te communiceren. Wakata blijft een half jaar aan boord van het ruimtestation, maar zal Kirobo niet mee naar huis nemen. De robot blijft op het ISS om boodschappen naar scholen te sturen. Kirobo zal rechtstreeks berichtjes op Twitter kunnen posten.
Op Aarde bestaat nog een tweede versie van Kirobo, die als reserve moet dienen. De robot moet ook een sociale rol vervullen. "We willen dat mensen met Kirobo kunnen communiceren en zich met hem verbonden kunnen voelen. Daarom hebben we hem een menselijke verschijning gegeven", zeggen zijn makers.
(HLN)
Japanse robot zet eerste stappen in de ruimte

© belga.
Een Japanse robot heeft als eerste in zijn soort een stap in de ruimte gezet. Kirobo werd begin augstus gelanceerd en ging enkele weken geleden een eerste keer buiten het ISS kijken.

© afp.

© afp.
Een kleine stap voor de mensheid, maar een grote sprong voor Kirobo. Het Japanse robotje heeft zijn ruimtedoop achter de rug. Op termijn moeten de androïdes - op mensen gelijkende robots - een partner worden tijdens lange ruimtemissies. Kirobo dankt zijn naam aan een combinatie van twee Japanse woorden die 'hoop' en 'robot' betekenen. Verschillende bedrijven werkten mee aan de robot, waaronder ook Toyota. Op 4 augustus lanceerde Japan Kirobo de ruimte in om zes dagen later het ISS te bereiken. Daar werd Kirobo op 21 augustus voor het eerst op verkenning gestuurd.
Over enkele maanden zal Kirobo vergezeld worden door een landgenoot. Koichi Wakata zal de eerste Japanse bevelvoerder van ISS worden. Kirobo zal zijn gelaatsuitdrukkingen herkennen en is gemaakt om in het Japans te communiceren. Wakata blijft een half jaar aan boord van het ruimtestation, maar zal Kirobo niet mee naar huis nemen. De robot blijft op het ISS om boodschappen naar scholen te sturen. Kirobo zal rechtstreeks berichtjes op Twitter kunnen posten.
Op Aarde bestaat nog een tweede versie van Kirobo, die als reserve moet dienen. De robot moet ook een sociale rol vervullen. "We willen dat mensen met Kirobo kunnen communiceren en zich met hem verbonden kunnen voelen. Daarom hebben we hem een menselijke verschijning gegeven", zeggen zijn makers.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
quote:Artificial Muscles Created Which Can Lift Loads 80 Times Its Weight, a First in Robotics
Sep. 3, 2013 — A research team from the National University of Singapore's (NUS) Faculty of Engineering has created efficient artificial, or "robotic" muscles, which could carry a weight 80 times its own and able to extend to five times its original length when carrying the load -- a first in robotics. The team's invention will pave the way for the constructing of life-like robots with superhuman strength and ability.
In addition, these novel artificial muscles could potentially convert and store energy, which could help the robots power themselves after a short period of charging.
Led by Dr Adrian Koh from NUS' Engineering Science Programme and Department of Civil and Environmental Engineering, the four-member team has been working on the project since July 2012.
Robots -- current limitations
Robots, no matter how intelligent, are restricted by their muscles which are able to lift loads only half its own weight -- about equivalent to an average human's strength (though some humans could lift loads up to three times their weight). Artificial muscles have been known to extend to only three times its original length when similarly stressed. The muscle's degree of extendability is a significant factor contributing to the muscle's efficiency as it means that it could perform a wider range of operations while carrying heavy loads.
Super, artificial muscles
Explaining how he and his multidisciplinary team managed to design and create their novel superhuman muscles, Dr Koh said, "Our materials mimic those of the human muscle, responding quickly to electrical impulses, instead of slowly for mechanisms driven by hydraulics. Robots move in a jerky manner because of this mechanism. Now, imagine artificial muscles which are pliable, extendable and react in a fraction of a second like those of a human. Robots equipped with such muscles will be able to function in a more human-like manner -- and outperform humans in strength."
In order to achieve this, Dr Koh and his team have used polymers which could be stretched over 10 times their original length. Translated scientifically, this means that these muscles have a strain displacement of 1,000 per cent.
A good understanding of the fundamentals was largely the cause of their success, Dr Koh added.
"We put theory to good use. Last year, we calculated theoretically that polymer muscles driven by electrical impulse could potentially have a strain displacement of 1,000 per cent, lifting a load of up to 500 times its own weight. So I asked my students to strive towards this Holy Grail, no matter how impossible it sounded," he said.
Green robots
"Our novel muscles are not just strong and responsive. Their movements produce a by-product -- energy. As the muscles contract and expand, they are capable of converting mechanical energy into electrical energy. Due to the nature of this material, it is capable of packing a large amount of energy in a small package. We calculated that if one were to build an electrical generator from these soft materials, a 10kg system is capable of producing the same amount of energy of a 1-ton electrical turbine" Dr Koh said.
This means that the energy generated may lead to the robot being self-powered after a short period of charging -- which is expected to be less than a minute.
The next step
Dr Koh said they are still beefing up their muscles. They will also be filing a patent for their success formula of materials and right degree of electric impulses. And in about three to five years, they expect to be able to come out with a robotic arm, about half the size and weight of a human arm which can wrestle with that of a human being's -- and win.
Powerful artificial muscles need not only be used in robots, said Dr Koh.
"Think of how efficient cranes can get when armed with such muscles," said Dr Koh.
The research team plans to work further with researchers from Materials Science, Mechanical Engineering, Electrical & Computer Engineering, as well as Bioengineering to create robots and robotic limbs which are more human-like in both functions and appearance.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Toen ik dit voor het eerst las was ik enthousiast, want actuatoren zijn een grote belemmering in autonome robots. Dergelijke motoren vereisen oa hoge efficiëntie, laag gewicht (dus goede power-to-weight ratio) en een hoog koppel bij laag toerental, wat eigenlijk gewoon niet bestaat. Tot nu toe althans, als ik bovenstaand artikel moet geloven.
Ik ben nog wel een beetje skeptisch, want kennelijk lost het ook het energie-probleem op. En het accu probleem. En problemen die eigenlijk niet bestaan, zoals bij kranen. Dat maakt het eigenlijk nogal ongeloofwaardig.
Ik ben nog wel een beetje skeptisch, want kennelijk lost het ook het energie-probleem op. En het accu probleem. En problemen die eigenlijk niet bestaan, zoals bij kranen. Dat maakt het eigenlijk nogal ongeloofwaardig.
13-09-2013
Robotmaden knabbelen lastig bereikbare tumoren uit het brein
Wetenschappers hebben robotische maden ontwikkeld die in staat zijn om tumoren die diep in het brein liggen en voor chirurgen praktisch onbereikbaar zijn, te vernietigen en de ‘brokstukken’ die daarbij vrijkomen op te ruimen.
“Het idee was een apparaatje te ontwikkelen dat klein is, maar dat tegelijkertijd al het werk dat een chirurg normaal gesproken doet, kan doen,” stelt onderzoeker J. Marc Simard. “Je kunt dit kleine robotische apparaatje in een tumor plaatsen, waarna het van binnenuit begint te werken en stukken ziek weefsel verwijdert.”
De robot
De robot in kwestie doet denken aan een vinger en heeft verschillende ‘gewrichten’ die de robot in staat stellen om zich (letterlijk) in allerlei bochten te wringen. Op het ‘kopje’ van de robot bevindt zich een apparaatje dat elektriciteit gebruikt om weefsels te verwarmen en zo uiteindelijk te vernietigen. Ook is de robot uitgerust met een buisje waardoor deze de afvalstoffen van de tumor naar binnen kan zuigen.
De robot. Afbeelding: University of Maryland.
Aansturen
Om de robot in het brein aan te brengen, hoeft maar een kleine incisie gemaakt te worden. Met behulp van een MRI-scan kunnen onderzoekers – zonder dat ze het brein verder hoeven te openen – de robot aansturen en de verrichtingen van de robot in de gaten houden. Op de MRI-beelden is bovendien goed te zien welk weefsel ziek en welk weefsel gezond is, dus kan de chirurg ervoor zorgen dat de robot alleen het zieke weefsel aanpakt.
De onderzoekers zien grote mogelijkheden voor de robotische ‘made’. Vooral als het gaat om de behandeling van zeer kwaadaardige hersentumoren die diep in het brein zitten en moeilijk te bereiken en te zien zijn tijdens een ‘normale’ chirurgische ingreep.
(scientias.com)
Robotmaden knabbelen lastig bereikbare tumoren uit het brein

Wetenschappers hebben robotische maden ontwikkeld die in staat zijn om tumoren die diep in het brein liggen en voor chirurgen praktisch onbereikbaar zijn, te vernietigen en de ‘brokstukken’ die daarbij vrijkomen op te ruimen.
“Het idee was een apparaatje te ontwikkelen dat klein is, maar dat tegelijkertijd al het werk dat een chirurg normaal gesproken doet, kan doen,” stelt onderzoeker J. Marc Simard. “Je kunt dit kleine robotische apparaatje in een tumor plaatsen, waarna het van binnenuit begint te werken en stukken ziek weefsel verwijdert.”
De robot
De robot in kwestie doet denken aan een vinger en heeft verschillende ‘gewrichten’ die de robot in staat stellen om zich (letterlijk) in allerlei bochten te wringen. Op het ‘kopje’ van de robot bevindt zich een apparaatje dat elektriciteit gebruikt om weefsels te verwarmen en zo uiteindelijk te vernietigen. Ook is de robot uitgerust met een buisje waardoor deze de afvalstoffen van de tumor naar binnen kan zuigen.

De robot. Afbeelding: University of Maryland.
Aansturen
Om de robot in het brein aan te brengen, hoeft maar een kleine incisie gemaakt te worden. Met behulp van een MRI-scan kunnen onderzoekers – zonder dat ze het brein verder hoeven te openen – de robot aansturen en de verrichtingen van de robot in de gaten houden. Op de MRI-beelden is bovendien goed te zien welk weefsel ziek en welk weefsel gezond is, dus kan de chirurg ervoor zorgen dat de robot alleen het zieke weefsel aanpakt.
De onderzoekers zien grote mogelijkheden voor de robotische ‘made’. Vooral als het gaat om de behandeling van zeer kwaadaardige hersentumoren die diep in het brein zitten en moeilijk te bereiken en te zien zijn tijdens een ‘normale’ chirurgische ingreep.
(scientias.com)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

Oh god no, de eerste stappen naar:quote:
13-09-2013
Robotmaden knabbelen lastig bereikbare tumoren uit het brein
[ afbeelding ]
(scientias.com)

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
07-10-2013
Technisch hoogstandje: robots kunnen zichzelf assembleren
Mashable Indrukwekkend staaltje techniek, getekend het Massachusetts Institute of Technology, kortweg MIT. De Amerikaanse universiteit ontwikkelde robots die zichzelf kunnen assembleren. Daarmee snoerde alvast één onderzoeker zijn critici de mond.
De robots zien er van buitenaf bedrieglijk eenvoudig uit. De kleine kubusjes hebben aan de buitenzijde geen bewegende delen. Toch kunnen ze zichzelf voorwaarts stuwen, op elkaar springen en samen een eindeloze reeks combinaties vormen.
Vliegwiel
De spitstechnologie zit dus ín de kubussen. Elke 'M-Block' (zo heten de robots) omvat een vliegwiel dat tot 20.000 omwentelingen per minuut maakt - dat is tot tien keer sneller dan de zuiger in de motor van een jet. De beweging van dat vliegwiel wordt vervolgens omgezet naar de kubus, die aan de randen voorzien is van een magneetje. Het resultaat is dat verschillende blokjes zichzelf modulair kunnen opbouwen.
Toen MIT-onderzoeker John Romanishin zijn project twee jaar geleden aan zijn robotica-prof voorstelde, had die categoriek geantwoord dat het niet uitvoerbaar was. "Dit kan niet gedaan worden", luidde het toen.
Meubels, bruggen en stellingen
Anno 2013 bewijzen de M-Blocks in deze video dat er een, zij het vrij eenvoudige, vorm van zelf-assemblerende robots mogelijk is. Het resultaat is nu al opmerkelijk, maar researchers dromen luidop van grotere toepassingen voor het principe. Zo zijn we vandaag een stapje dichterbij bruggen of stellingen die zichzelf kunnen opbouwen, of meubels die zichzelf in elkaar zetten.
(HLN)
Technisch hoogstandje: robots kunnen zichzelf assembleren

Mashable Indrukwekkend staaltje techniek, getekend het Massachusetts Institute of Technology, kortweg MIT. De Amerikaanse universiteit ontwikkelde robots die zichzelf kunnen assembleren. Daarmee snoerde alvast één onderzoeker zijn critici de mond.
De robots zien er van buitenaf bedrieglijk eenvoudig uit. De kleine kubusjes hebben aan de buitenzijde geen bewegende delen. Toch kunnen ze zichzelf voorwaarts stuwen, op elkaar springen en samen een eindeloze reeks combinaties vormen.
Vliegwiel
De spitstechnologie zit dus ín de kubussen. Elke 'M-Block' (zo heten de robots) omvat een vliegwiel dat tot 20.000 omwentelingen per minuut maakt - dat is tot tien keer sneller dan de zuiger in de motor van een jet. De beweging van dat vliegwiel wordt vervolgens omgezet naar de kubus, die aan de randen voorzien is van een magneetje. Het resultaat is dat verschillende blokjes zichzelf modulair kunnen opbouwen.
Toen MIT-onderzoeker John Romanishin zijn project twee jaar geleden aan zijn robotica-prof voorstelde, had die categoriek geantwoord dat het niet uitvoerbaar was. "Dit kan niet gedaan worden", luidde het toen.
Meubels, bruggen en stellingen
Anno 2013 bewijzen de M-Blocks in deze video dat er een, zij het vrij eenvoudige, vorm van zelf-assemblerende robots mogelijk is. Het resultaat is nu al opmerkelijk, maar researchers dromen luidop van grotere toepassingen voor het principe. Zo zijn we vandaag een stapje dichterbij bruggen of stellingen die zichzelf kunnen opbouwen, of meubels die zichzelf in elkaar zetten.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
NASA Unveils Valkyrie, Its Humanoid Rescue Robot [Video]
The Boston Dynamics-built ATLAS is the rescue robot prototype that gets all the attention, but now NASA is getting in on the action, unveiling Valkyrie, a 6-foot 2-inch, 275-pound rescue robot. The 'bot, an entrant in the DARPA Robotics Challenge, a contest designed to find the life-saving robot of tomorrow, will soon undergo a test to see if it can perform tasks like climbing a ladder and using tools.
Why is NASA involved? Because it wants to eventually send robots to Mars ahead of humans, and the DARPA challenge is providing data on how they can do it. Valkyrie itself won't be rocketed to space--it's a terrestrial robot, not built for that kind of travel--but it's a useful starting point for the agency.
Valkyrie uses its three-fingered hands to manipulate objects, and it's loaded with cameras and sensors so it can eventually operate as autonomously as possible. Plus, (and this is an admittedly small detail) the robot actually looks great. If it was trying to save my life, I wouldn't recoil in terror, probably.
http://www.popsci.com/art(...)video?src=SOC&dom=fb

The Boston Dynamics-built ATLAS is the rescue robot prototype that gets all the attention, but now NASA is getting in on the action, unveiling Valkyrie, a 6-foot 2-inch, 275-pound rescue robot. The 'bot, an entrant in the DARPA Robotics Challenge, a contest designed to find the life-saving robot of tomorrow, will soon undergo a test to see if it can perform tasks like climbing a ladder and using tools.
Why is NASA involved? Because it wants to eventually send robots to Mars ahead of humans, and the DARPA challenge is providing data on how they can do it. Valkyrie itself won't be rocketed to space--it's a terrestrial robot, not built for that kind of travel--but it's a useful starting point for the agency.
Valkyrie uses its three-fingered hands to manipulate objects, and it's loaded with cameras and sensors so it can eventually operate as autonomously as possible. Plus, (and this is an admittedly small detail) the robot actually looks great. If it was trying to save my life, I wouldn't recoil in terror, probably.
http://www.popsci.com/art(...)video?src=SOC&dom=fb
"An educated citizenry is a vital requisite for our survival as a free people."
Van de bedragen die met deze overname gemoeid zijn is nog niets te vinden. Google zet stevig in op robotica. Het verschil is dat bedrijven die robots maken vaak specialisten zijn op een bepaald terrein. En elkaars concurrenten waardoor kennis liever binnenshuis wordt gehouden. Bij google kunnen ze nu hun expertise aanwenden voor gemeenschappelijke doelen.quote:
Google neemt bedrijf achter snelste robot over
Google heeft het bedrijf Boston Dynamics overgenomen. Dat bedrijf ontwikkelde onder andere de Cheetah, een van de snelste robots op dit moment.
Boston Dynamics werkt op dit moment onder andere in opdracht van het Pentagon, aan met name robots die snel zijn en een goed gevoel voor evenwicht hebben. Daar kwamen de Cheetah en de Wildcat uit voort, waarvan de laatste behalve erg snel ook erg wendbaar is.
Het bedrijf is al het achtste robotbedrijf dat Google in de afgelopen zes maanden heeft overgenomen. Onlangs kondigde Google nog aan dat het zich gaat richten op het ontwikkelen van intelligente en mensachtige robots. Voormalig Androidbaas Andy Rubin wordt leider van het project.
Hoeveel Google betaalde voor Boston Dynamics is niet bekend. Ook zal het bedrijf eerdere contracten nakomen, zoals de zeer menselijke robot Atlas die het nog in ontwikkeling heeft.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Sorry, beetje vage tabel zo. Maar dit zijn alle robot/AI bedrijven die ze hebben overgenomen de laatste tijd. Best wel veel dusquote:
[..]
Van de bedragen die met deze overname gemoeid zijn is nog niets te vinden. Google zet stevig in op robotica. Het verschil is dat bedrijven die robots maken vaak specialisten zijn op een bepaald terrein. En elkaars concurrenten waardoor kennis liever binnenshuis wordt gehouden. Bij google kunnen ze nu hun expertise aanwenden voor gemeenschappelijke doelen.
123 March 12, 2013 DNNresearch Inc. Deep Neural Networks CAN
124 March 15, 2013 Talaria Technologies Cloud computing USA
125 April 12, 2013 Behavio Social Prediction USA
126 April 23, 2013 Wavii Natural Language Processing USA
127 May 23, 2013 Makani Power Airborne wind turbines USA
128 June 11, 2013 Waze GPS navigation software ISR
129 September 16, 2013 Bump Mobile software USA
130 October 2, 2013 Flutter Gesture recognition technology USA
131 October 22, 2013 FlexyCore DroidBooster App for Android FRA
132 2013 Schaft.inc humanoid robots JPN
133 2013 Industrial Perception Computer Vision USA
134 2013 Redwood Robotics Robotic Arms USA
135 2013 Meka Robotics Robots USA
136 2013 Holomni Robotic wheels USA
137 2013 Bot & Dolly Robotic cameras
http://en.wikipedia.org/w(...)quisitions_by_Google
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

Ik denk dat het eerder om patenten en (toekomstige) marktpositie gaat. Als het puur om technologie zou gaan, koop je niet zo veel bedrijven in zo'n korte tijd. Dan heb je aan een paar grote (zoals Boston Dynamics) genoeg.quote:
[..]
Van de bedragen die met deze overname gemoeid zijn is nog niets te vinden. Google zet stevig in op robotica. Het verschil is dat bedrijven die robots maken vaak specialisten zijn op een bepaald terrein. En elkaars concurrenten waardoor kennis liever binnenshuis wordt gehouden. Bij google kunnen ze nu hun expertise aanwenden voor gemeenschappelijke doelen.


Verontrustend..quote:
Zeer de moeite waard, duurt een half uur:
....nachtrijder...Nachtzwelgje!
Ik vind de gemiddelde mentale volwassenheid van de mens in het jaar 2013 veel verontrustender.quote:
 Op
Op De grootste bedreiging voor de Aarde en de mensheid, is de mens.
"An educated citizenry is a vital requisite for our survival as a free people."
20-12-2013
'Robots in space': Kirobo keuvelt met astronaut
Een robot die naar het International Ruimtestation (ISS) is gestuurd, heeft zijn eerste sociale missie succesvol uitgevoerd: de robot Kirobo heeft de Japanse astronaut Koichi Wakata gezelschap gehouden en met hem in het Japans over koetjes en kalfjes gesproken.
Kirobo maakte kennis met Wakata en zei dat hij er al aan gewend was dat er geen zwaartekracht in het ruimtestation is. Vandaag zijn beelden vrijgegeven van Kirobo's 'praatmissie' door de Japanse publieke omroep NHK.
Kirobo drukt zich ook in lichaamstaal uit want hij maakt gebaren tijdens de conversatie. Het team dat van Kirobo een gezellige metgezel in de ruimte maakt, heeft 3 jaar aan Kirobo gewerkt en is erg tevreden over de eerste resultaten. Kirobo is een product van onder meer de Universiteit van Tokio, robottenpioniers van Robo Garage, het Japanse ruimtevaartinstituut JAXA en de ondernemingen Dentsu en Toyota.
(HLN)
'Robots in space': Kirobo keuvelt met astronaut

Een robot die naar het International Ruimtestation (ISS) is gestuurd, heeft zijn eerste sociale missie succesvol uitgevoerd: de robot Kirobo heeft de Japanse astronaut Koichi Wakata gezelschap gehouden en met hem in het Japans over koetjes en kalfjes gesproken.
Kirobo maakte kennis met Wakata en zei dat hij er al aan gewend was dat er geen zwaartekracht in het ruimtestation is. Vandaag zijn beelden vrijgegeven van Kirobo's 'praatmissie' door de Japanse publieke omroep NHK.
Kirobo drukt zich ook in lichaamstaal uit want hij maakt gebaren tijdens de conversatie. Het team dat van Kirobo een gezellige metgezel in de ruimte maakt, heeft 3 jaar aan Kirobo gewerkt en is erg tevreden over de eerste resultaten. Kirobo is een product van onder meer de Universiteit van Tokio, robottenpioniers van Robo Garage, het Japanse ruimtevaartinstituut JAXA en de ondernemingen Dentsu en Toyota.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
SCHAFT team tops scores at DARPA Robotics Challenge
http://phys.org/news/2013-12-schaft-team-tops-scores-darpa.html

http://phys.org/news/2013-12-schaft-team-tops-scores-darpa.html

"An educated citizenry is a vital requisite for our survival as a free people."

23-01-2014
Wetenschap voorziet robots van snorharen
Wetenschappers hebben elektronische snorharen ontwikkeld waarmee robots in de toekomst hun omgeving op een heel nieuwe manier kunnen ‘voelen’ en ‘zien’.
Om de snorharen te ontwikkelen, lieten de onderzoekers zich wederom inspireren door de natuur. Verschillende zoogdieren – waaronder bijvoorbeeld katten – beschikken over snorharen. Ze gebruiken ze bijvoorbeeld om obstakels waar te nemen. Maar ook verschillende insecten beschikken over haarachtige sensoren waarmee ze aanrakingen kunnen waarnemen. Ze gebruiken ze om bijvoorbeeld de wind te monitoren.
Wetenschappers hebben die snorharen nu nagebootst. “Onze elektronische snorharen bestaan uit elastische vezels die bedekt zijn met een geleidende coating bestaande uit nanobuisjes en nanodeeltjes,” legt onderzoeker Ali Javey uit. Tijdens experimenten bleken deze elektronische snorharen tien keer gevoeliger te zijn voor druk dan vergelijkbare druksensoren die eerder ontwikkeld zijn. De snorharen kunnen zelfs een heel lichte druk van één Pascal – vergelijkbaar met een geldbiljet dat op tafel ‘drukt’ – waarnemen.
Niet alleen robots kunnen gebaat zijn bij de ‘snorharen’. De sensoren kunnen in de toekomst ook leiden tot de ontwikkeling van bijvoorbeeld draagbare sensoren die de hartslag meten
(scientias.nl)
Wetenschap voorziet robots van snorharen

Wetenschappers hebben elektronische snorharen ontwikkeld waarmee robots in de toekomst hun omgeving op een heel nieuwe manier kunnen ‘voelen’ en ‘zien’.
Om de snorharen te ontwikkelen, lieten de onderzoekers zich wederom inspireren door de natuur. Verschillende zoogdieren – waaronder bijvoorbeeld katten – beschikken over snorharen. Ze gebruiken ze bijvoorbeeld om obstakels waar te nemen. Maar ook verschillende insecten beschikken over haarachtige sensoren waarmee ze aanrakingen kunnen waarnemen. Ze gebruiken ze om bijvoorbeeld de wind te monitoren.
Wetenschappers hebben die snorharen nu nagebootst. “Onze elektronische snorharen bestaan uit elastische vezels die bedekt zijn met een geleidende coating bestaande uit nanobuisjes en nanodeeltjes,” legt onderzoeker Ali Javey uit. Tijdens experimenten bleken deze elektronische snorharen tien keer gevoeliger te zijn voor druk dan vergelijkbare druksensoren die eerder ontwikkeld zijn. De snorharen kunnen zelfs een heel lichte druk van één Pascal – vergelijkbaar met een geldbiljet dat op tafel ‘drukt’ – waarnemen.
Niet alleen robots kunnen gebaat zijn bij de ‘snorharen’. De sensoren kunnen in de toekomst ook leiden tot de ontwikkeling van bijvoorbeeld draagbare sensoren die de hartslag meten
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Deze is volgens mij nog niet langsgeweest. Topic doorgelezen maar misschien had ik erover heen gelezen.
Voor 35.000 dollar niet erg duur vergeleken met soortgelijke, de arm wordt aangestuurd door ubuntu.

Voor 35.000 dollar niet erg duur vergeleken met soortgelijke, de arm wordt aangestuurd door ubuntu.

Hey dat lijkt de zorgrobot van de buurvrouw welquote:
Deze is volgens mij nog niet langsgeweest. Topic doorgelezen maar misschien had ik erover heen gelezen.
[ afbeelding ]
Voor 35.000 dollar niet erg duur vergeleken met soortgelijke, de arm wordt aangestuurd door ubuntu.
[ afbeelding ]
L'Amour menaçant:
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
Die heb ik niet voorbij zien komen iddquote:
Deze is volgens mij nog niet langsgeweest. Topic doorgelezen maar misschien had ik erover heen gelezen.
[ afbeelding ]
Voor 35.000 dollar niet erg duur vergeleken met soortgelijke, de arm wordt aangestuurd door ubuntu.
[ afbeelding ]
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
27-01-2014
Robots leren via eigen internet
Internationaal onderzoeksproject RobotEarth ondanks falende proef een groot succes
In het robotlaboratorium van de Technische Universiteit Eindhoven (TU/e) helpen vier verschillende robots patiënten in nagebouwde ziekenhuiskamers; geen van de robots is in staat zijn taak zelfstandig uit te voeren.
‘Patiënt’ (en ETH-onderzoeker) Markus Waibel wacht vergeefs op zijn drankje van de robot op de voorgrond.
Sterker nog, ze hebben helemaal geen verstand van werken in het ziekenhuis. Maar geholpen door RoboEarth kunnen ze het toch: RoboEarth laat robots autonoom van elkaar leren en samenwerken via een eigen internet en complexe berekeningen uitvoeren in de Robocloud.
Het werkt bijvoorbeeld als volgt. Twee robots verkennen ieder een ziekenhuiskamer. Zodra hun kaart van de kamer klaar is, uploaden ze deze naar RoboEarth. Andere robots kunnen de kaart opvragen en meteen door de ziekenhuiskamer navigeren. De patiënt vraagt om een drankje. De robot stuurt dit spraakcommando naar de RoboEarth-servers. Deze analyseren de opdracht en sturen recepten voor de handelingen die de robot moet uitvoeren. Elke geschikte robot kan nu het drankje brengen. Is er geen geschikte robot, dan zoekt RoboEarth naar robots die het al samenwerkend wel kunnen.
Onze robots proberen het twee keer vergeefs. Falende netwerkhardware, een kapotte accu en tot overmaat van ramp een gevallen drankje gooien roet in het eten. De wet van Murphy klopt in al haar facetten. De mislukte demonstratie kan niet verhullen dat RoboEarth een succes is. Het project begon vier jaar geleden met een Europese subsidie en een samenwerking tussen vijf universiteiten en Philips; de TU/e fungeert als coördinator van het project.
Een robot kan alleen wat zijn programmeur hem leert. Een fabrieksrobot die bij Philips in Drachten scheerapparaten assembleert, kan niet zomaar andere apparaten in elkaar zetten. Daarvoor moet Philips de productielijn ombouwen en de robots herprogrammeren. ‘Dit kost elke keer 80 % van de aanschafwaarde van de productielijn’, zegt Heico Sandee van de TU/e. Meer flexibele robots die zelfstandig leren is de oplossing waar iedereen naar uitkijkt. ‘Toch zullen toekomstige robots dom blijven’, vervolgt hij. ‘De robot zal beschikken over eenvoudige processoren en sensoren waarbij hij zijn gegevens van RoboEarth krijgt. We bouwden bijvoorbeeld een robot met een creditcard-formaat computer, een wifi-verbinding en 3d-sensoren van een spelcomputer. Dankzij RoboEarth kan deze robot complexe handelingen verrichten.’
Mohanarajah Gajamohan van de ETH Zürich zegt dat er drie dingen nodig waren om RoboEarth te realiseren. ‘Als eerste een universele taal waarmee robots recepten voor bewegingssequenties, plattegronden en objectherkenning uitwisselen. Ten tweede opslagcapaciteit bij de RoboEarth-servers van de Universität Stuttgart. En als laatste rekenkracht in de vorm van een Robocloud, die we onderbrachten in de cloud van Amazon in Ierland.’
Het project slaagde: RoboEarth is inmiddels operationeel en wordt via een open source community steeds meer uitgebreid. Alle partners van RoboEarth kregen inmiddels geld voor vervolgonderzoek. Gajamohan over de toekomst: ‘De universele robottaal zal steeds rijker worden en liefst uitgroeien tot de wereldwijde standaard voor de communicatie tussen van elkaar lerende robots. Een van de problemen nu is de traagheid waarmee we grote hoeveelheden data als plattegronden kunnen versturen. Nieuwe communicatiestandaarden, zoals het 4G-netwerk, kunnen dit probleem oplossen.’
Maarten Steinbuch van de TU/e plaatst RoboEarth in een breder perspectief: ‘De standaard die we ontwikkelden is bijvoorbeeld zeer geschikt voor autonoom rijden. Auto’s kunnen analoog aan robots snel van elkaar leren bij veranderende verkeerssituaties door gegevens via een netwerk uit te wisselen. Veel van de technieken die we voor RoboEarth gebruiken, gebruiken we ook bij ons onderzoek naar de autonoom rijdende auto.’
Intussen wacht onze ‘patiënt’, ETH-onderzoeker Markus Waibel, nog steeds op zijn drankje. Hij blijft gelaten onder alle pech tijdens de demonstratie. ‘RoboEarth is een softwareproject. Die software kunnen we alleen demonstreren met hardware. Alle software die we ontwikkelden voor de onderlinge communicatie tussen de robots, RoboEarth en Robocloud werken, maar we zien het niet omdat de hardware ons in de steek laat.’
Gelukkig voor alle onderzoekers werkte de demonstratie een dag later wel. Toen kwamen de leden van de Europese Commissie op bezoek om de resultaten van vier jaar werk te bekijken.
(technischweekblad.nl)
Robots leren via eigen internet
Internationaal onderzoeksproject RobotEarth ondanks falende proef een groot succes
In het robotlaboratorium van de Technische Universiteit Eindhoven (TU/e) helpen vier verschillende robots patiënten in nagebouwde ziekenhuiskamers; geen van de robots is in staat zijn taak zelfstandig uit te voeren.

‘Patiënt’ (en ETH-onderzoeker) Markus Waibel wacht vergeefs op zijn drankje van de robot op de voorgrond.
Sterker nog, ze hebben helemaal geen verstand van werken in het ziekenhuis. Maar geholpen door RoboEarth kunnen ze het toch: RoboEarth laat robots autonoom van elkaar leren en samenwerken via een eigen internet en complexe berekeningen uitvoeren in de Robocloud.
Het werkt bijvoorbeeld als volgt. Twee robots verkennen ieder een ziekenhuiskamer. Zodra hun kaart van de kamer klaar is, uploaden ze deze naar RoboEarth. Andere robots kunnen de kaart opvragen en meteen door de ziekenhuiskamer navigeren. De patiënt vraagt om een drankje. De robot stuurt dit spraakcommando naar de RoboEarth-servers. Deze analyseren de opdracht en sturen recepten voor de handelingen die de robot moet uitvoeren. Elke geschikte robot kan nu het drankje brengen. Is er geen geschikte robot, dan zoekt RoboEarth naar robots die het al samenwerkend wel kunnen.
Onze robots proberen het twee keer vergeefs. Falende netwerkhardware, een kapotte accu en tot overmaat van ramp een gevallen drankje gooien roet in het eten. De wet van Murphy klopt in al haar facetten. De mislukte demonstratie kan niet verhullen dat RoboEarth een succes is. Het project begon vier jaar geleden met een Europese subsidie en een samenwerking tussen vijf universiteiten en Philips; de TU/e fungeert als coördinator van het project.
Een robot kan alleen wat zijn programmeur hem leert. Een fabrieksrobot die bij Philips in Drachten scheerapparaten assembleert, kan niet zomaar andere apparaten in elkaar zetten. Daarvoor moet Philips de productielijn ombouwen en de robots herprogrammeren. ‘Dit kost elke keer 80 % van de aanschafwaarde van de productielijn’, zegt Heico Sandee van de TU/e. Meer flexibele robots die zelfstandig leren is de oplossing waar iedereen naar uitkijkt. ‘Toch zullen toekomstige robots dom blijven’, vervolgt hij. ‘De robot zal beschikken over eenvoudige processoren en sensoren waarbij hij zijn gegevens van RoboEarth krijgt. We bouwden bijvoorbeeld een robot met een creditcard-formaat computer, een wifi-verbinding en 3d-sensoren van een spelcomputer. Dankzij RoboEarth kan deze robot complexe handelingen verrichten.’
Mohanarajah Gajamohan van de ETH Zürich zegt dat er drie dingen nodig waren om RoboEarth te realiseren. ‘Als eerste een universele taal waarmee robots recepten voor bewegingssequenties, plattegronden en objectherkenning uitwisselen. Ten tweede opslagcapaciteit bij de RoboEarth-servers van de Universität Stuttgart. En als laatste rekenkracht in de vorm van een Robocloud, die we onderbrachten in de cloud van Amazon in Ierland.’
Het project slaagde: RoboEarth is inmiddels operationeel en wordt via een open source community steeds meer uitgebreid. Alle partners van RoboEarth kregen inmiddels geld voor vervolgonderzoek. Gajamohan over de toekomst: ‘De universele robottaal zal steeds rijker worden en liefst uitgroeien tot de wereldwijde standaard voor de communicatie tussen van elkaar lerende robots. Een van de problemen nu is de traagheid waarmee we grote hoeveelheden data als plattegronden kunnen versturen. Nieuwe communicatiestandaarden, zoals het 4G-netwerk, kunnen dit probleem oplossen.’
Maarten Steinbuch van de TU/e plaatst RoboEarth in een breder perspectief: ‘De standaard die we ontwikkelden is bijvoorbeeld zeer geschikt voor autonoom rijden. Auto’s kunnen analoog aan robots snel van elkaar leren bij veranderende verkeerssituaties door gegevens via een netwerk uit te wisselen. Veel van de technieken die we voor RoboEarth gebruiken, gebruiken we ook bij ons onderzoek naar de autonoom rijdende auto.’
Intussen wacht onze ‘patiënt’, ETH-onderzoeker Markus Waibel, nog steeds op zijn drankje. Hij blijft gelaten onder alle pech tijdens de demonstratie. ‘RoboEarth is een softwareproject. Die software kunnen we alleen demonstreren met hardware. Alle software die we ontwikkelden voor de onderlinge communicatie tussen de robots, RoboEarth en Robocloud werken, maar we zien het niet omdat de hardware ons in de steek laat.’
Gelukkig voor alle onderzoekers werkte de demonstratie een dag later wel. Toen kwamen de leden van de Europese Commissie op bezoek om de resultaten van vier jaar werk te bekijken.
(technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
04-02-2014
Robotchirurg vijf keer preciezer dan mens
Wetenschappers van de Technische Universiteit Eindhoven hebben een robot gemaakt die in staat is extreem precieze operaties te doen. De robotchirurg kan vijf keer nauwkeuriger opereren dan een menselijke arts.
De robotchirurg van de Technische Universiteit Eindhoven Bron: Bart van Overbeeke
Bron: Bart van Overbeeke
De robot is ontwikkeld door werktuigbouwkundige Raimondo Cau. Het voordeel van de robot is dat hij heel secuur en trillingvrij kan opereren. Daardoor is de robot geschikt voor reconstructieve chirurgie.
Bij deze operaties neemt een arts wat weefsel weg van een gezonde plek van het lichaam om op een andere plek de reconstructie te doen – bijvoorbeeld borstreconstructie. De arts moet bloedvaten en zenuwbanen aan het nieuwe weefsel hechten. Dat is een enorme precisieklus. Omdat maar weinig artsen hiertoe in staat zijn, bestaan er lange wachtlijsten voor deze operaties. En de behoefte aan deze operaties neemt toe. De robot kan daarbij uitkomst bieden
Een chirurg stuurt de operatierobot met twee joysticks. Tegelijkertijd kan hij of zij de grootte van de beweging controleren met behulp van een voetpedaal. Als de handen van de chirurg trillen, zal het systeem deze trillingen wegfilteren.
Binnen een jaar zullen de eerste test op proefpersonen zijn uitgevoerd.
(newscientist.nl)
Robotchirurg vijf keer preciezer dan mens
Wetenschappers van de Technische Universiteit Eindhoven hebben een robot gemaakt die in staat is extreem precieze operaties te doen. De robotchirurg kan vijf keer nauwkeuriger opereren dan een menselijke arts.

De robotchirurg van de Technische Universiteit Eindhoven Bron: Bart van Overbeeke
Bron: Bart van Overbeeke
De robot is ontwikkeld door werktuigbouwkundige Raimondo Cau. Het voordeel van de robot is dat hij heel secuur en trillingvrij kan opereren. Daardoor is de robot geschikt voor reconstructieve chirurgie.
Bij deze operaties neemt een arts wat weefsel weg van een gezonde plek van het lichaam om op een andere plek de reconstructie te doen – bijvoorbeeld borstreconstructie. De arts moet bloedvaten en zenuwbanen aan het nieuwe weefsel hechten. Dat is een enorme precisieklus. Omdat maar weinig artsen hiertoe in staat zijn, bestaan er lange wachtlijsten voor deze operaties. En de behoefte aan deze operaties neemt toe. De robot kan daarbij uitkomst bieden
Een chirurg stuurt de operatierobot met twee joysticks. Tegelijkertijd kan hij of zij de grootte van de beweging controleren met behulp van een voetpedaal. Als de handen van de chirurg trillen, zal het systeem deze trillingen wegfilteren.
Binnen een jaar zullen de eerste test op proefpersonen zijn uitgevoerd.
(newscientist.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
11-04-2014
Robot voor ruimte en rampen
RoboSimian, een robot die lijkt op een chimpansee, maar loopt als een spin, is verkozen tot een van de acht finalisten in de Robotics Challenge 2014 van DARPA, de researchafdeling van het Amerikaanse ministerie van defensie.
Clyde, de bijnaam van de robot die is ontwikkeld door Nasa’s Jet Propulsion Laboratory in Pasadena (Californië), kan deuren openen, moeren aandraaien, afsluiters bedienen, wrakstukken opruimen en puinhopen beklimmen.
De winnaar van de robotwedstrijd die in december in Florida wordt gehouden, ontvangt $ 2 miljoen. Einddoel is een robot die ingezet kan worden als planeetverkenner, of op aarde bij nucleaire rampen en vergelijkbare catastrofes.
(technischweekblad)
Robot voor ruimte en rampen

RoboSimian, een robot die lijkt op een chimpansee, maar loopt als een spin, is verkozen tot een van de acht finalisten in de Robotics Challenge 2014 van DARPA, de researchafdeling van het Amerikaanse ministerie van defensie.
Clyde, de bijnaam van de robot die is ontwikkeld door Nasa’s Jet Propulsion Laboratory in Pasadena (Californië), kan deuren openen, moeren aandraaien, afsluiters bedienen, wrakstukken opruimen en puinhopen beklimmen.
De winnaar van de robotwedstrijd die in december in Florida wordt gehouden, ontvangt $ 2 miljoen. Einddoel is een robot die ingezet kan worden als planeetverkenner, of op aarde bij nucleaire rampen en vergelijkbare catastrofes.
(technischweekblad)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
24-02-2014
Amsterdamse beurs voor de eerste keer geopend door een robot
Een primeur! Vanmorgen is de AEX-beurs in Amsterdam voor de allereerste keer geopend door een robot! De eer viel ten beurt aan een robotarm van de Universiteit Twente.
De robotarm – voluit Light Weight Robot (type LWR4+) – wordt normaliter gebruikt voor onderzoeksdoeleinden. Maar vanmorgen vroeg had deze even een andere taak: de Amsterdamse beurs openen. En dat deed de robot met een gongslag. Masterstudent Jop Huttenhuis had de robot speciaal voor deze gelegenheid geprogrammeerd, zodat deze de gong zonder probleem over Beursplein 5 kon laten schallen.
De gongslag stond symbool voor de samenwerking die de Universiteit van Twente binnen het door de Europese Commissie gelanceerde PETROBOT-project met onder meer het bedrijf Shell aangaat. De universiteit werkt binnen het project aan robots die op den duur mensen die drukvaten en opslagtanks in de olie- gas- en petrochemische industrie inspecteren, moeten vervangen. Nu is zo’n inspectie nog heel tijdrovend en gevaarlijk. Installaties moeten buiten bedrijf worden gesteld voordat inspecteurs er naar binnen kunnen gaan. Dat betekent dat reservoirs niet alleen moeten worden afgesloten, maar daadwerkelijk moeten worden losgekoppeld van de actieve delen van de installatie. Daarna moeten de reservoirs worden schoongemaakt. Dan volgt de inspectie, waarna het reservoir weer moet worden aangesloten. Het is een lange, dure procedure die door de inzet van robots wellicht een stuk gemakkelijker, goedkoper en sneller kan plaatsvinden. En daar wordt sinds eind vorig jaar onderzoek naar gedaan.
Uiteindelijk ontstaat zo hopelijk een werkomgeving waarin robots en mensen zij aan zij werken, maar waarbij robots voornamelijk de gevaarlijke klusjes op zich nemen. De robotarm die vanochtend de beurs opende, weet daar alles van. De robot is uniek omdat er in de arm speciale sensoren zitten waarmee de bewegingen van de robot ‘met gevoel’ bij kunnen worden gestuurd. Hierdoor is deze robotarm heel geschikt voor interacties tussen de robot en mensen
(scientias.nl)
Amsterdamse beurs voor de eerste keer geopend door een robot

Een primeur! Vanmorgen is de AEX-beurs in Amsterdam voor de allereerste keer geopend door een robot! De eer viel ten beurt aan een robotarm van de Universiteit Twente.
De robotarm – voluit Light Weight Robot (type LWR4+) – wordt normaliter gebruikt voor onderzoeksdoeleinden. Maar vanmorgen vroeg had deze even een andere taak: de Amsterdamse beurs openen. En dat deed de robot met een gongslag. Masterstudent Jop Huttenhuis had de robot speciaal voor deze gelegenheid geprogrammeerd, zodat deze de gong zonder probleem over Beursplein 5 kon laten schallen.
De gongslag stond symbool voor de samenwerking die de Universiteit van Twente binnen het door de Europese Commissie gelanceerde PETROBOT-project met onder meer het bedrijf Shell aangaat. De universiteit werkt binnen het project aan robots die op den duur mensen die drukvaten en opslagtanks in de olie- gas- en petrochemische industrie inspecteren, moeten vervangen. Nu is zo’n inspectie nog heel tijdrovend en gevaarlijk. Installaties moeten buiten bedrijf worden gesteld voordat inspecteurs er naar binnen kunnen gaan. Dat betekent dat reservoirs niet alleen moeten worden afgesloten, maar daadwerkelijk moeten worden losgekoppeld van de actieve delen van de installatie. Daarna moeten de reservoirs worden schoongemaakt. Dan volgt de inspectie, waarna het reservoir weer moet worden aangesloten. Het is een lange, dure procedure die door de inzet van robots wellicht een stuk gemakkelijker, goedkoper en sneller kan plaatsvinden. En daar wordt sinds eind vorig jaar onderzoek naar gedaan.
Uiteindelijk ontstaat zo hopelijk een werkomgeving waarin robots en mensen zij aan zij werken, maar waarbij robots voornamelijk de gevaarlijke klusjes op zich nemen. De robotarm die vanochtend de beurs opende, weet daar alles van. De robot is uniek omdat er in de arm speciale sensoren zitten waarmee de bewegingen van de robot ‘met gevoel’ bij kunnen worden gestuurd. Hierdoor is deze robotarm heel geschikt voor interacties tussen de robot en mensen
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
25-03-2014
Robot Zora krijgt 250.000 euro van Vlaamse regering
Robot Zora. © belga.
Het bedrijf Qbmt uit Oostende krijgt 250.000 euro via het Agentschap voor Innovatie door Wetenschap en Technologie (IWT). Dat zal geïnvesteerd worden in de verdere ontwikkeling van de humanoïde robot Zora, samen met de Universiteit Gent en UZ Gent. Dat maakten de stad Oostende en Qbmt bekend.
Robot Zora is een 57 centimeter grote programmeerbare humanoïde robot die over allerlei sensoren beschikt. Het Oostendse bedrijf Qbmt ontwerpt de software voor de robots, die in Frankrijk geproduceerd wordt door Aldebaran Robotics.
De robot wordt onder meer ingeschakeld in rusthuizen en ziekenhuizen. "Dat gaat van het voorlezen van de krant en het dagmenu, maar Zora kan revalidatie-oefeningen begeleiden en zorgen voor entertainment", zegt oprichter Fabrice Goffin.
Ontwikkeling en extra werkkrachten
De 250.000 zal geïnvesteerd worden in de verdere ontwikkeling van de robot. "Zo willen we nagaan welke spieren goed of slecht functioneren. We kunnen dat gebruiken voor patiënten met epilepsieaanvallen, maar ook in de revalidatie. Zora kan registreren wie de oefeningen goed volgt, en of de spieren zich goed ontwikkelen", aldus Goffin. Met het geld kunnen ook twee nieuwe werkkrachten worden aangetrokken.
Zora wordt al voltijds ingezet in het woonzorgcentrum De Boarebreker in Oostende. "En binnenkort gaan we ook een Zora leveren in Eernegem en nog één in Oostende, maar er is ook interesse uit Duitsland en Nederland. De aanvragen stromen binnen, dus commercialisering dringt zich op", besluit Goffin.
Ook de Vlaamse Investeringmaatschappij PMV toont volgens de zaakvoerders interesse.
(HLN)
Robot Zora krijgt 250.000 euro van Vlaamse regering

Robot Zora. © belga.
Het bedrijf Qbmt uit Oostende krijgt 250.000 euro via het Agentschap voor Innovatie door Wetenschap en Technologie (IWT). Dat zal geïnvesteerd worden in de verdere ontwikkeling van de humanoïde robot Zora, samen met de Universiteit Gent en UZ Gent. Dat maakten de stad Oostende en Qbmt bekend.
Robot Zora is een 57 centimeter grote programmeerbare humanoïde robot die over allerlei sensoren beschikt. Het Oostendse bedrijf Qbmt ontwerpt de software voor de robots, die in Frankrijk geproduceerd wordt door Aldebaran Robotics.
De robot wordt onder meer ingeschakeld in rusthuizen en ziekenhuizen. "Dat gaat van het voorlezen van de krant en het dagmenu, maar Zora kan revalidatie-oefeningen begeleiden en zorgen voor entertainment", zegt oprichter Fabrice Goffin.
Ontwikkeling en extra werkkrachten
De 250.000 zal geïnvesteerd worden in de verdere ontwikkeling van de robot. "Zo willen we nagaan welke spieren goed of slecht functioneren. We kunnen dat gebruiken voor patiënten met epilepsieaanvallen, maar ook in de revalidatie. Zora kan registreren wie de oefeningen goed volgt, en of de spieren zich goed ontwikkelen", aldus Goffin. Met het geld kunnen ook twee nieuwe werkkrachten worden aangetrokken.
Zora wordt al voltijds ingezet in het woonzorgcentrum De Boarebreker in Oostende. "En binnenkort gaan we ook een Zora leveren in Eernegem en nog één in Oostende, maar er is ook interesse uit Duitsland en Nederland. De aanvragen stromen binnen, dus commercialisering dringt zich op", besluit Goffin.
Ook de Vlaamse Investeringmaatschappij PMV toont volgens de zaakvoerders interesse.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
26-03-2014
Robot betovert publiek met TED-lezing
...misschien ooit...
De X-Prize Foundation looft een grote prijs uit voor de eerste robot die een TED-lezing houdt. De hoofdprijs? Dat mag jij bepalen.
'Me robot; you human. Me created by you; you product of evolution. Welcome at this first TED-talk presented by a non-human…'
Wie weet begint over een paar jaar zo de eerste TED-lezing gehouden door een robot. Als het aan de X-Prize Foundation ligt, is dit namelijk de volgende grote uitdaging in de kunstmatige intelligentie. Dat maakte de organisatie afgelopen donderdag 20 maart bekend.
Making the Impossible Possible – dat is het motto van de X-Prize. Uitdaging: realiseer een grote technologische doorbraak en win daarmee miljoenen dollars. Zo staan er onder andere X-Prijzen open voor de eerste door een private partij gerealiseerde maanlanding (twintig miljoen dollar) en voor het eerste draagbare apparaat dat een betere medische diagnose stelt dan een groep artsen (tien miljoen dollar).
In 2004 werd de tot nu toe enige X-Prize toegekend: de ruimtevaart-X-Prize ging toen naar het team dat SpaceShipOne had gebouwd. Hier was de uitdaging dat een private partij een ruimteschip zou bouwen dat tweemaal binnen twee weken drie mensen heen en weer naar de ruimte kon vervoeren. En dat lukte.
Applausmeter
De precieze regels voor de nieuwe Artificial Intelligence-X-Prize liggen nog niet vast. Voorlopig staat de organisatoren het volgende scenario voor ogen: Een groep mensen selecteert van te voren honderd mogelijke onderwerpen voor een TED-lezing die een robot moet geven. Vervolgens kiest het aanwezige publiek één onderwerp uit. Daarna krijgt het menselijke robotteam een half uur om de robot te prepareren.
Dan is het de beurt aan de robot. Hij neemt plaats op de beroemde rode TED-stip en houdt een lezing van drie minuten. Na afloop stelt de menselijke presentator en curator van de TED-conferentie Chris Anderson twee vragen aan de robot. Ten slotte geeft het publiek een oordeel over de kwaliteit van de lezing via de hoeveelheid applaus en geeft een panel van experts een beargumenteerd oordeel.
Dat is het ruwe idee. Maar de organisatie nodigt vanaf nu iedereen uit om via hun website mee te denken over de spelregels. Moet de robot een TED-lezing van 3, 5, 10 of 18 minuten houden? Wie mag het onderwerp van de lezing kiezen? En moet het wel een robot zijn die de lezing houdt, of is het realistischer om de uitdaging te geven aan een computer zonder lichaam, die alleen maar sprekend aanwezig is (net zoals supercomputer Watson die in 2011 de Jeopardy-quiz won).
Hoeveel is de uitdaging waard? 1 miljoen dollar? 5 miljoen? 10 miljoen? En de belangrijkste vraag: wat moeten de criteria worden op grond waarvan het robotteam al dan niet de prijs wint?
Supercomputer Watson verslaat de twee beste menselijke spelers in de Jeopardy-quiz (2011)
Zoom
Vliegende vogels
Een robot die een TED-lezing houdt klinkt prachtig. Toch is het maar zeer de vraag of deze uitdaging de kunstmatige intelligentie (en de mensheid) vooruit helpt. Net zoals de beroemde Turingtest is de A.I.-X-Prize gericht op het nabootsen van menselijke intelligentie. Maar net zoals een Boeing 747 heel anders vliegt dan een vogel, zo kan kunstmatige intelligentie best heel anders zijn dan menselijke intelligentie, en daar is niets mis mee.
Ruim zes decennia aan ontwikkelingen in robots en computers laten zien dat kunstmatige intelligentie in sommige dingen veel beter is dan menselijke intelligentie, en in andere dingen juist veel slechter. Computers en robots kunnen sneller en nauwkeuriger rekenen; ze hebben een enorm en feilloos geheugen; ze raken nooit vermoeid; ze zijn goed in exacte feiten en hebben geen last van zenuwen of andere psychologische belemmeringen.
Mensen zijn echter beter dan computers en robots in het leren van nieuwe dingen, in patroonherkenning en -interpretatie; in sociaal-emotionele intelligentie; in cognitieve vaardigheden die geworteld zijn in het lichaam, in het omgaan met vaagheden en onzekerheden; in het begrijpen van de rijke, alledaagse wereld en in creativiteit. Voor sommige taken is de biologische, levende hardware van mensen beter en voor andere taken de elektronische, niet-levende hardware van computers en robots.
Golem XIV
Een robot die een TED-lezing geeft, kent trouwens een literaire voorloper. De Poolse science-fictionschrijver Stansilaw Lem laat in zijn verhaal Golem XIV uit 1981 al een supercomputer met dezelfde naam een lezing voor mensen houden. De computer begint om de mensen er fijntjes op te wijzen dat zij door hun evolutionaire achtergrond een lezing willen die verhalend is en hen emotioneel raakt. Golem XIV vindt dat een groot nadeel van de mens. Liever wil hij meteen tot de kern komen, desnoods met abstracte formules: "Ik zal mijn lezing larderen met voorbeelden en parabels, omdat jullie mensen ze zo nodig hebben. Ikzelf heb ze helemaal niet nodig."
Een robot kan best een lezing van drie minuten houden door op een slimme manier kennis van Wikipedia, de Encyclopaedia Britannica en ontelbare andere internetbronnen te combineren. Je zou hem best kunnen programmeren om er enkele grapjes in te verwerken. Maar persoonlijkheid heeft hij niet en contact met de zaal zal hij ook niet of nauwelijks maken. Waarom zou een robot echter op een menselijke manier een lezing moeten geven? Helpt die robot ons vervolgens om grote uitdagingen in de kunstmatige intelligentie op te lossen en zo de mensheid te helpen?
Kopje koffie
Een van die grote uitdagingen is het onder de knie krijgen van een algemeen leerproces, zoals mensen met een-en-hetzelfde brein uiteenlopende taken kunnen leren: van leren voetballen of viool spelen tot een nieuwe taal leren. Een tweede grote uitdaging is het leren van alledaagse kennis: bijvoorbeeld dat een glas water kapot valt op de grond wanneer je het uit je handen laat glippen − typisch kennis die mensen leren door te doen. En wij doen enorm veel van zulke alledaagse kennis spelenderwijs op, zonder dat er taal aan te pas komt.
Een derde grote uitdaging is het omgaan met een ongestructureerde omgeving die een robot nooit eerder heeft gezien. Zet de robot in een onbekende woning en vraag hem om een kop koffie of thee te zetten. Dat is een veel moeilijkere uitdaging. Toegegeven, dat spreekt minder tot de verbeelding dan het houden van een TED-lezing, maar het zou meer opleveren voor de mensheid.
(wetenschap24.nl)
Robot betovert publiek met TED-lezing
...misschien ooit...
De X-Prize Foundation looft een grote prijs uit voor de eerste robot die een TED-lezing houdt. De hoofdprijs? Dat mag jij bepalen.

'Me robot; you human. Me created by you; you product of evolution. Welcome at this first TED-talk presented by a non-human…'
Wie weet begint over een paar jaar zo de eerste TED-lezing gehouden door een robot. Als het aan de X-Prize Foundation ligt, is dit namelijk de volgende grote uitdaging in de kunstmatige intelligentie. Dat maakte de organisatie afgelopen donderdag 20 maart bekend.
Making the Impossible Possible – dat is het motto van de X-Prize. Uitdaging: realiseer een grote technologische doorbraak en win daarmee miljoenen dollars. Zo staan er onder andere X-Prijzen open voor de eerste door een private partij gerealiseerde maanlanding (twintig miljoen dollar) en voor het eerste draagbare apparaat dat een betere medische diagnose stelt dan een groep artsen (tien miljoen dollar).
In 2004 werd de tot nu toe enige X-Prize toegekend: de ruimtevaart-X-Prize ging toen naar het team dat SpaceShipOne had gebouwd. Hier was de uitdaging dat een private partij een ruimteschip zou bouwen dat tweemaal binnen twee weken drie mensen heen en weer naar de ruimte kon vervoeren. En dat lukte.
Applausmeter
De precieze regels voor de nieuwe Artificial Intelligence-X-Prize liggen nog niet vast. Voorlopig staat de organisatoren het volgende scenario voor ogen: Een groep mensen selecteert van te voren honderd mogelijke onderwerpen voor een TED-lezing die een robot moet geven. Vervolgens kiest het aanwezige publiek één onderwerp uit. Daarna krijgt het menselijke robotteam een half uur om de robot te prepareren.
Dan is het de beurt aan de robot. Hij neemt plaats op de beroemde rode TED-stip en houdt een lezing van drie minuten. Na afloop stelt de menselijke presentator en curator van de TED-conferentie Chris Anderson twee vragen aan de robot. Ten slotte geeft het publiek een oordeel over de kwaliteit van de lezing via de hoeveelheid applaus en geeft een panel van experts een beargumenteerd oordeel.
Dat is het ruwe idee. Maar de organisatie nodigt vanaf nu iedereen uit om via hun website mee te denken over de spelregels. Moet de robot een TED-lezing van 3, 5, 10 of 18 minuten houden? Wie mag het onderwerp van de lezing kiezen? En moet het wel een robot zijn die de lezing houdt, of is het realistischer om de uitdaging te geven aan een computer zonder lichaam, die alleen maar sprekend aanwezig is (net zoals supercomputer Watson die in 2011 de Jeopardy-quiz won).
Hoeveel is de uitdaging waard? 1 miljoen dollar? 5 miljoen? 10 miljoen? En de belangrijkste vraag: wat moeten de criteria worden op grond waarvan het robotteam al dan niet de prijs wint?

Supercomputer Watson verslaat de twee beste menselijke spelers in de Jeopardy-quiz (2011)
Zoom
Vliegende vogels
Een robot die een TED-lezing houdt klinkt prachtig. Toch is het maar zeer de vraag of deze uitdaging de kunstmatige intelligentie (en de mensheid) vooruit helpt. Net zoals de beroemde Turingtest is de A.I.-X-Prize gericht op het nabootsen van menselijke intelligentie. Maar net zoals een Boeing 747 heel anders vliegt dan een vogel, zo kan kunstmatige intelligentie best heel anders zijn dan menselijke intelligentie, en daar is niets mis mee.
Ruim zes decennia aan ontwikkelingen in robots en computers laten zien dat kunstmatige intelligentie in sommige dingen veel beter is dan menselijke intelligentie, en in andere dingen juist veel slechter. Computers en robots kunnen sneller en nauwkeuriger rekenen; ze hebben een enorm en feilloos geheugen; ze raken nooit vermoeid; ze zijn goed in exacte feiten en hebben geen last van zenuwen of andere psychologische belemmeringen.
Mensen zijn echter beter dan computers en robots in het leren van nieuwe dingen, in patroonherkenning en -interpretatie; in sociaal-emotionele intelligentie; in cognitieve vaardigheden die geworteld zijn in het lichaam, in het omgaan met vaagheden en onzekerheden; in het begrijpen van de rijke, alledaagse wereld en in creativiteit. Voor sommige taken is de biologische, levende hardware van mensen beter en voor andere taken de elektronische, niet-levende hardware van computers en robots.

Golem XIV
Een robot die een TED-lezing geeft, kent trouwens een literaire voorloper. De Poolse science-fictionschrijver Stansilaw Lem laat in zijn verhaal Golem XIV uit 1981 al een supercomputer met dezelfde naam een lezing voor mensen houden. De computer begint om de mensen er fijntjes op te wijzen dat zij door hun evolutionaire achtergrond een lezing willen die verhalend is en hen emotioneel raakt. Golem XIV vindt dat een groot nadeel van de mens. Liever wil hij meteen tot de kern komen, desnoods met abstracte formules: "Ik zal mijn lezing larderen met voorbeelden en parabels, omdat jullie mensen ze zo nodig hebben. Ikzelf heb ze helemaal niet nodig."
Een robot kan best een lezing van drie minuten houden door op een slimme manier kennis van Wikipedia, de Encyclopaedia Britannica en ontelbare andere internetbronnen te combineren. Je zou hem best kunnen programmeren om er enkele grapjes in te verwerken. Maar persoonlijkheid heeft hij niet en contact met de zaal zal hij ook niet of nauwelijks maken. Waarom zou een robot echter op een menselijke manier een lezing moeten geven? Helpt die robot ons vervolgens om grote uitdagingen in de kunstmatige intelligentie op te lossen en zo de mensheid te helpen?

Kopje koffie
Een van die grote uitdagingen is het onder de knie krijgen van een algemeen leerproces, zoals mensen met een-en-hetzelfde brein uiteenlopende taken kunnen leren: van leren voetballen of viool spelen tot een nieuwe taal leren. Een tweede grote uitdaging is het leren van alledaagse kennis: bijvoorbeeld dat een glas water kapot valt op de grond wanneer je het uit je handen laat glippen − typisch kennis die mensen leren door te doen. En wij doen enorm veel van zulke alledaagse kennis spelenderwijs op, zonder dat er taal aan te pas komt.
Een derde grote uitdaging is het omgaan met een ongestructureerde omgeving die een robot nooit eerder heeft gezien. Zet de robot in een onbekende woning en vraag hem om een kop koffie of thee te zetten. Dat is een veel moeilijkere uitdaging. Toegegeven, dat spreekt minder tot de verbeelding dan het houden van een TED-lezing, maar het zou meer opleveren voor de mensheid.
(wetenschap24.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
19-04-2014
Nieuwe robot hupt als kangoeroe
Een slim stukje techniek heeft een ware robotkangoeroe voortgebracht. Duitse innovatiewetenschappers maakten BionicKangaroo, die net als een levend exemplaar vooruit hopt. De sprongen van de robot kunnen tot tachtig centimeter ver zijn. Zijn recordhoogte is veertig centimeter.
De robotkangoeroe.
Bron: Festo
De staart houdt de kangoeroe in balans tijdens zijn sprongen. Daarnaast gaven zijn makers hem een elastische ‘achilleshiel’. Dit stelt de robot in staat om de bewegingsenergie van de eerste sprong op te slaan, en te hergebruiken bij de tweede sprong. Echte kangoeroes gebruiken een vergelijkbaar systeem, waardoor ze lange afstanden kunnen afleggen zonder snel uitgeput te raken.
Je kunt de robot met gebaren sturen. Een armband houdt je armbewegingen in de gaten, en stuurt deze via Bluetooth naar de kangoeroe.
De makers vertellen in een persverklaring dat de robot ‘nieuwe mogelijkheden onthult voor industriële technologen’. Dat klinkt nog wat vaag, dus een directe toepassing heeft de robotkangoeroe waarschijnlijk niet. Maar dat zal het enthousiasme van de robotliefhebbers niet drukken. Wie wil deze vrolijke Skippy nou niet in huis halen?
Familie van de kangoeroe
Het is overigens niet het eerste leuke project van het onderzoeksteam. Zij maakten ook al robotpinguïns, -meeuwen en -kwallen.
(newscientist.nl)
Nieuwe robot hupt als kangoeroe

Een slim stukje techniek heeft een ware robotkangoeroe voortgebracht. Duitse innovatiewetenschappers maakten BionicKangaroo, die net als een levend exemplaar vooruit hopt. De sprongen van de robot kunnen tot tachtig centimeter ver zijn. Zijn recordhoogte is veertig centimeter.

De robotkangoeroe.
Bron: Festo
De staart houdt de kangoeroe in balans tijdens zijn sprongen. Daarnaast gaven zijn makers hem een elastische ‘achilleshiel’. Dit stelt de robot in staat om de bewegingsenergie van de eerste sprong op te slaan, en te hergebruiken bij de tweede sprong. Echte kangoeroes gebruiken een vergelijkbaar systeem, waardoor ze lange afstanden kunnen afleggen zonder snel uitgeput te raken.
Je kunt de robot met gebaren sturen. Een armband houdt je armbewegingen in de gaten, en stuurt deze via Bluetooth naar de kangoeroe.
De makers vertellen in een persverklaring dat de robot ‘nieuwe mogelijkheden onthult voor industriële technologen’. Dat klinkt nog wat vaag, dus een directe toepassing heeft de robotkangoeroe waarschijnlijk niet. Maar dat zal het enthousiasme van de robotliefhebbers niet drukken. Wie wil deze vrolijke Skippy nou niet in huis halen?
Familie van de kangoeroe
Het is overigens niet het eerste leuke project van het onderzoeksteam. Zij maakten ook al robotpinguïns, -meeuwen en -kwallen.
(newscientist.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
12-05-2014
VN bindt de strijd aan met 'moordende robots'
Campaign to Stop Killer Robots. © reuters.
Ver van alle sciencefictiontaferelen en scenaristen in Hollywood werkt de VN nauwgezet aan een kader om de rol van robots in toekomstige conflicten te regelen. Dat meldt BBC News. Een werkgroep van experts komt vanaf morgen bijeen, tegen de achtergrond van de VN-conventie voor conventionele wapens. Hun rapport wordt in november bekend gemaakt.
Een volledig autonoom wapen dat doelwitten kan selecteren en aanvallen zonder enige menselijke interventie labelen onderzoekers als een 'moordende robot'. De gevraagde experts zullen blijk moeten geven van enige verbeeldingskracht aangezien deze 'moordende robots' nog niet in de praktijk bestaan.
Hoe dan ook, robots zullen de toekomstige manier van oorlogvoering grondig door elkaar schudden. In positieve dan wel negatieve zin? Dat is voer voor dit debat. Pro-pleiters menen dat het inzetten van robots het leven van soldaten spaart. Ook zouden robots minder gedreven zijn door emoties en bijgevolg meer rationele beslissingen nemen.
Professor Arkin van het Georgia Institute of Technology én pro-stem: "Een moratorium instellen tegen deze robots is dan misschien wel een 'goede' oplossing, de 'juiste' is ze ongetwijfeld niet." Volgens hem moet de wetenschap ongebreideld in staat zijn om zich te ontwikkelen.
Drones toegelaten
Andere academische stemmen zijn dan weer veel sceptischer. Zo ook Sheffields University-professor Sharkey, die de campagne 'Campaign Against Killer Robots' heeft gelanceerd. Hij ijvert voor een een internationaal wetgevend kader die de toekomstige ontwikkeling van deze 'moordende robots' moet framen. "De landen onderling praten voorlopig niet over dit onderwerp en dit mag verbazen, want het risico voor de mensheid is enorm."
Over de beruchte drones, die al op grote schaal in conflictgebieden gebruikt worden, zullen de experts het niet hebben. Ze opereren immers nog niet volledig autonoom.
(HLN)
VN bindt de strijd aan met 'moordende robots'

Campaign to Stop Killer Robots. © reuters.
Ver van alle sciencefictiontaferelen en scenaristen in Hollywood werkt de VN nauwgezet aan een kader om de rol van robots in toekomstige conflicten te regelen. Dat meldt BBC News. Een werkgroep van experts komt vanaf morgen bijeen, tegen de achtergrond van de VN-conventie voor conventionele wapens. Hun rapport wordt in november bekend gemaakt.
Een volledig autonoom wapen dat doelwitten kan selecteren en aanvallen zonder enige menselijke interventie labelen onderzoekers als een 'moordende robot'. De gevraagde experts zullen blijk moeten geven van enige verbeeldingskracht aangezien deze 'moordende robots' nog niet in de praktijk bestaan.
Hoe dan ook, robots zullen de toekomstige manier van oorlogvoering grondig door elkaar schudden. In positieve dan wel negatieve zin? Dat is voer voor dit debat. Pro-pleiters menen dat het inzetten van robots het leven van soldaten spaart. Ook zouden robots minder gedreven zijn door emoties en bijgevolg meer rationele beslissingen nemen.
Professor Arkin van het Georgia Institute of Technology én pro-stem: "Een moratorium instellen tegen deze robots is dan misschien wel een 'goede' oplossing, de 'juiste' is ze ongetwijfeld niet." Volgens hem moet de wetenschap ongebreideld in staat zijn om zich te ontwikkelen.
Drones toegelaten
Andere academische stemmen zijn dan weer veel sceptischer. Zo ook Sheffields University-professor Sharkey, die de campagne 'Campaign Against Killer Robots' heeft gelanceerd. Hij ijvert voor een een internationaal wetgevend kader die de toekomstige ontwikkeling van deze 'moordende robots' moet framen. "De landen onderling praten voorlopig niet over dit onderwerp en dit mag verbazen, want het risico voor de mensheid is enorm."
Over de beruchte drones, die al op grote schaal in conflictgebieden gebruikt worden, zullen de experts het niet hebben. Ze opereren immers nog niet volledig autonoom.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
12-05-2014
Supersnelle robotarm vangt objecten in 500e van een seconde
Vijfhonderdste van een seconde. Meer tijd heeft een Zwitserse robotarm niet nodig om objecten met de meest uiteenlopende en complexe vormen – van een bal tot een tennisracket – uit de lucht te grijpen. En dat is best knap!
De robotarm is zo’n 1,5 meter lang en telt drie gewrichten. De arm is bovendien uitgerust met een hand met vier vingers. De robotarm is speciaal ontwikkeld om objecten te vangen. En dat doet ‘ie. En razendsnel ook.
Bijzonder
En dat is best bijzonder, zo vertelt onderzoeker Aude Billard. “Machines zijn vandaag de dag vaak voorgeprogrammeerd en kunnen niet snel inspringen op veranderingen in hun omgeving. “Hun enige keus is dan het opnieuw berekenen van de baan van een object, maar dat kost te veel tijd in een situatie waarin elke fractie van een seconde telt.”
Demonstreren
Om de robotarm in staat te stellen sneller te reageren, maakten de onderzoekers gebruik van een techniek die bekend staat als ‘Programming by demonstration‘. Eén van de onderzoekers pakt daarbij de arm van de robot en stuurt deze. Een andere onderzoeker gooit ondertussen objecten naar de robotarm. De robot ‘observeert’ hoe de mens op de objecten reageert en kan dat daarna imiteren, doordat hij tijdens het oefenen meerdere keren een object op zich heeft af zien komen en op basis daarvan een model heeft gebouwd dat hem in staat stelt om het object kort daarna zelfstandig te vangen. Om de kans dat de robotarm het object vangt, te vergroten, gaat deze niet alleen op het model af. Terwijl een object de robotarm nadert, voert deze nog berekeningen uit om het model verder te verbeteren.
Met het onderzoek hopen de wetenschappers robots nog beter voor te kunnen bereiden op een plekje in de menselijke samenleving, waarin omstandigheden van het ene op het andere moment kunnen veranderen. Het kan dan wenselijk zijn dat een robot objecten vangen of juist razendsnel ontwijken kan.
(scientias.nl)
Supersnelle robotarm vangt objecten in 500e van een seconde

Vijfhonderdste van een seconde. Meer tijd heeft een Zwitserse robotarm niet nodig om objecten met de meest uiteenlopende en complexe vormen – van een bal tot een tennisracket – uit de lucht te grijpen. En dat is best knap!
De robotarm is zo’n 1,5 meter lang en telt drie gewrichten. De arm is bovendien uitgerust met een hand met vier vingers. De robotarm is speciaal ontwikkeld om objecten te vangen. En dat doet ‘ie. En razendsnel ook.
Bijzonder
En dat is best bijzonder, zo vertelt onderzoeker Aude Billard. “Machines zijn vandaag de dag vaak voorgeprogrammeerd en kunnen niet snel inspringen op veranderingen in hun omgeving. “Hun enige keus is dan het opnieuw berekenen van de baan van een object, maar dat kost te veel tijd in een situatie waarin elke fractie van een seconde telt.”

Demonstreren
Om de robotarm in staat te stellen sneller te reageren, maakten de onderzoekers gebruik van een techniek die bekend staat als ‘Programming by demonstration‘. Eén van de onderzoekers pakt daarbij de arm van de robot en stuurt deze. Een andere onderzoeker gooit ondertussen objecten naar de robotarm. De robot ‘observeert’ hoe de mens op de objecten reageert en kan dat daarna imiteren, doordat hij tijdens het oefenen meerdere keren een object op zich heeft af zien komen en op basis daarvan een model heeft gebouwd dat hem in staat stelt om het object kort daarna zelfstandig te vangen. Om de kans dat de robotarm het object vangt, te vergroten, gaat deze niet alleen op het model af. Terwijl een object de robotarm nadert, voert deze nog berekeningen uit om het model verder te verbeteren.
Met het onderzoek hopen de wetenschappers robots nog beter voor te kunnen bereiden op een plekje in de menselijke samenleving, waarin omstandigheden van het ene op het andere moment kunnen veranderen. Het kan dan wenselijk zijn dat een robot objecten vangen of juist razendsnel ontwijken kan.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
12-05-2014
Kan een robot het verschil tussen goed en kwaad leren?
Is het mogelijk om een robot te ontwikkelen die het verschil weet tussen goed en kwaad en dus zijn tanden kan zetten in elk moreel dilemma waar deze mee te maken krijgt? Wetenschappers gaan het uitzoeken!
Morele dilemma’s: we hebben er dagelijks mee te maken. En wanneer robots ons op grote schaal met onze dagelijkse bezigheden gaan helpen, zullen ook zij vroeg of laat voor morele keuzes komen te staan. Bijvoorbeeld wanneer ze in het leger aan de slag gaan. Stel: een robot krijgt opdracht om medicijnen naar een nabijgelegen ziekenhuis te brengen. Onderweg stuit hij op een gewonde soldaat. Moet hij stoppen en helpen of doorgaan en de medicijnen afleveren? En als hij beslist om te stoppen, komt hij wellicht weer voor andere morele keuzes te staan. Bijvoorbeeld als hij ‘ziet’ dat de soldaat hevig bloedt en dat de bloeding alleen gestopt kan worden als hij op de wond drukt, iets wat enorm veel pijn zal veroorzaken. Mag hij de soldaat die pijn aandoen? Ook al is het goed voor de soldaat?
Lastig
Voor ons mensen zijn morele dilemma’s al lastig. Voor een robot zal dat niet anders zijn. “Morele competentie is ruwweg te definiëren als de vaardigheid om te leren en denken over, reageren op en praten over de wetten en sociale conventies waarover mensen het doorgaans eens zijn,” stelt onderzoeker Matthias Scheutz. “De vraag is of machines – of andere kunstmatige systemen – deze vaardigheden kunnen nabootsen.”
Inbouwen
En dat is exact wat Scheutz en zijn collega’s nu willen gaan uitzoeken. Ze beginnen met het bestuderen van de morele competentie van mensen. Vervolgens zal het een ware uitdaging blijken om die morele competentie in robots in te bouwen. “Ons lab zal unieke algoritmes en mechanismen ontwikkelen en integreren in de bestaande architectuur voor autonome robots. Deze aangepast architectuur zal flexibel genoeg zijn om de robot in staat te stellen de geplande acties op basis van moreel redeneren te herzien.” Zodra robots met die systemen zijn uitgerust, volgen experimenten waarbij robots tijdens interacties met mensen met morele dilemma’s te maken krijgen. Dan zal moeten blijken of robots in staat zijn om een voor mensen acceptabele keuze te maken en uit te leggen waarom ze die keuze maakten.
De onderzoekers staan om meerdere redenen voor een zware taak. Zo wordt hun onderzoek bemoeilijkt door het feit dat we nog altijd niet weten welke mechanismen aan de moraal van de mens ten grondslag liggen. Daarnaast is het onmogelijk om de robot op alle morele dilemma’s voor te bereiden. “We hebben het hier over robots die ontworpen zijn om autonoom te zijn: dus het belangrijkste doel van hun bestaan is dat je ze niet hoeft te vertellen wat ze moeten doen,” vertelt onderzoeker Selmer Bringsjord. “Wanneer een onvoorziene situatie opdoemt, moet de robot in staat zijn om daarover na te denken, omdat het onmogelijk is om een set regels te creëren die met elk mogelijk scenario rekening houdt.”
(scientias.nl)
Kan een robot het verschil tussen goed en kwaad leren?

Is het mogelijk om een robot te ontwikkelen die het verschil weet tussen goed en kwaad en dus zijn tanden kan zetten in elk moreel dilemma waar deze mee te maken krijgt? Wetenschappers gaan het uitzoeken!
Morele dilemma’s: we hebben er dagelijks mee te maken. En wanneer robots ons op grote schaal met onze dagelijkse bezigheden gaan helpen, zullen ook zij vroeg of laat voor morele keuzes komen te staan. Bijvoorbeeld wanneer ze in het leger aan de slag gaan. Stel: een robot krijgt opdracht om medicijnen naar een nabijgelegen ziekenhuis te brengen. Onderweg stuit hij op een gewonde soldaat. Moet hij stoppen en helpen of doorgaan en de medicijnen afleveren? En als hij beslist om te stoppen, komt hij wellicht weer voor andere morele keuzes te staan. Bijvoorbeeld als hij ‘ziet’ dat de soldaat hevig bloedt en dat de bloeding alleen gestopt kan worden als hij op de wond drukt, iets wat enorm veel pijn zal veroorzaken. Mag hij de soldaat die pijn aandoen? Ook al is het goed voor de soldaat?
Lastig
Voor ons mensen zijn morele dilemma’s al lastig. Voor een robot zal dat niet anders zijn. “Morele competentie is ruwweg te definiëren als de vaardigheid om te leren en denken over, reageren op en praten over de wetten en sociale conventies waarover mensen het doorgaans eens zijn,” stelt onderzoeker Matthias Scheutz. “De vraag is of machines – of andere kunstmatige systemen – deze vaardigheden kunnen nabootsen.”
Inbouwen
En dat is exact wat Scheutz en zijn collega’s nu willen gaan uitzoeken. Ze beginnen met het bestuderen van de morele competentie van mensen. Vervolgens zal het een ware uitdaging blijken om die morele competentie in robots in te bouwen. “Ons lab zal unieke algoritmes en mechanismen ontwikkelen en integreren in de bestaande architectuur voor autonome robots. Deze aangepast architectuur zal flexibel genoeg zijn om de robot in staat te stellen de geplande acties op basis van moreel redeneren te herzien.” Zodra robots met die systemen zijn uitgerust, volgen experimenten waarbij robots tijdens interacties met mensen met morele dilemma’s te maken krijgen. Dan zal moeten blijken of robots in staat zijn om een voor mensen acceptabele keuze te maken en uit te leggen waarom ze die keuze maakten.
De onderzoekers staan om meerdere redenen voor een zware taak. Zo wordt hun onderzoek bemoeilijkt door het feit dat we nog altijd niet weten welke mechanismen aan de moraal van de mens ten grondslag liggen. Daarnaast is het onmogelijk om de robot op alle morele dilemma’s voor te bereiden. “We hebben het hier over robots die ontworpen zijn om autonoom te zijn: dus het belangrijkste doel van hun bestaan is dat je ze niet hoeft te vertellen wat ze moeten doen,” vertelt onderzoeker Selmer Bringsjord. “Wanneer een onvoorziene situatie opdoemt, moet de robot in staat zijn om daarover na te denken, omdat het onmogelijk is om een set regels te creëren die met elk mogelijk scenario rekening houdt.”
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

Bron: http://robotnieuws.blogsp(...)eerste-paprikas.htmlquote:Robot oogst zelfstandig eerste paprika's in de kas
In het Europese FP7 project Clever Robots for Crops (CROPS) is een oogstrobot ontwikkeld. Onlangs is in een commerciële kas gedemonstreerd dat het systeem volledig autonoom rijpe paprika’s kan oogsten. In de komende weken wordt de performance van het systeem wat betreft oogstsucces, cyclustijden en oorzaken van fouten vastgesteld. Het project wordt gecoördineerd door Wageningen UR Glastuinbouw.
Na 3,5 jaar onderzoek is de integratie van de ontwikkelde modules afgerond. De basis van het systeem is een buisrail platform met daarop een robotarm met gereedschap voor het grijpen en afsnijden van de vruchten, een persluchtcompressor, diverse elektronica, computers en de camera’s voor vrucht en obstakeldetectie.
De detectie en lokalisatie van rijpe vruchten gebeurt in twee stappen. Eerst worden overzichtsbeelden van de zijkant van het gewas opgenomen met een kleurencamera en een Time of Flight camera. Beide beelden worden vervolgens samengevoegd om tot een enkel 3D kleurenbeeld te komen. Nadat de arm voor de te oogsten vrucht is geplaatst worden met een mini kleurencamera en een 3D camera, die in de robothand geïntegreerd zijn, beelden opgenomen en geanalyseerd. Hierdoor kan de vruchtpositie met hoge nauwkeurigheid herberekend worden.
CROPS is een Europees project met 14 partners. CROPS richt zich op het ontwikkelen van nieuwe techniek voor sensoren, robotarmen, grijpers en intelligentie, die in verschillende toepassingen ingezet kan worden. Wageningen UR Glastuinbouw richt zich in het project op het oogsten van paprika’s en focust daarbij op de ontwikkeling van intelligentie voor robots, die kunnen worden ingezet in ongestructureerde omgevingen. Het project heeft additionele financiering van het Productschap Tuinbouw.
Ik vraag me af wat er zo vernieuwend is aan dit systeem. Ik heb stage gelopen bij een bedrijf wat exact hetzelfde deed voor rozen, en dat is al zo'n 8 jaar geleden.
17-06-2014
Miljarden voor Europese robotica
De Europese Commissie en 180 bedrijven en onderzoeksinstellingen steken gezamenlijk € 2,8 miljard in een onderzoeksprogramma voor civiele robotica (industriële assemblage, gezonheidszorg, transport, agricultuur). Dit levert circa 240.000 nieuwe banen op, aldus de EC.
Het programma, genaamd SPARC, wordt grotendeels gefinancierd door de onderzoeksinstellingen en bedrijven: onder de naam euRobotics steken zij € 2,1 miljard in het programma; de EC neemt de overige € 700 miljoen voor zijn rekening. Momenteel gaat er jaarlijks zo’n € 22 miljard om in robotica. De EC verwacht dat dit groeit naar zo’n € 50 tot 62 miljard in 2020.
(technischweekblad.nl)
Miljarden voor Europese robotica
De Europese Commissie en 180 bedrijven en onderzoeksinstellingen steken gezamenlijk € 2,8 miljard in een onderzoeksprogramma voor civiele robotica (industriële assemblage, gezonheidszorg, transport, agricultuur). Dit levert circa 240.000 nieuwe banen op, aldus de EC.
Het programma, genaamd SPARC, wordt grotendeels gefinancierd door de onderzoeksinstellingen en bedrijven: onder de naam euRobotics steken zij € 2,1 miljard in het programma; de EC neemt de overige € 700 miljoen voor zijn rekening. Momenteel gaat er jaarlijks zo’n € 22 miljard om in robotica. De EC verwacht dat dit groeit naar zo’n € 50 tot 62 miljard in 2020.
(technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
24-06-2014
Robot parkeert auto's op Dusseldorf Airport
© epa.
Reizigers die vliegen via Düsseldorf Airport kunnen vanaf dinsdag hun auto laten parkeren door een robot, meldt de Duitse luchthaven. Je kunt de robot reserveren met een app. De auto wordt bij terugkomst van de reis op basis van kenteken en vluchtgegevens automatisch klaargezet om weg te rijden.
De Robot, genaamd Ray, tilt de auto met een soort vorkheftruck op en rijdt de wagen naar zijn parkeerplek. Gebruikers kunnen via de app vluchtwijzigingen doorgeven.
Ray berekent automatisch hoe laat de reizigers aankomen bij hun auto, zodat ze direct kunnen wegrijden. De robotparkeerplek kost 29 euro per dag.
De app is via Google Play te downloaden. De app is niet per se nodig om gebruik te kunnen maken van de robot.
© ap.
(HLN)
Robot parkeert auto's op Dusseldorf Airport

© epa.
Reizigers die vliegen via Düsseldorf Airport kunnen vanaf dinsdag hun auto laten parkeren door een robot, meldt de Duitse luchthaven. Je kunt de robot reserveren met een app. De auto wordt bij terugkomst van de reis op basis van kenteken en vluchtgegevens automatisch klaargezet om weg te rijden.
De Robot, genaamd Ray, tilt de auto met een soort vorkheftruck op en rijdt de wagen naar zijn parkeerplek. Gebruikers kunnen via de app vluchtwijzigingen doorgeven.
Ray berekent automatisch hoe laat de reizigers aankomen bij hun auto, zodat ze direct kunnen wegrijden. De robotparkeerplek kost 29 euro per dag.
De app is via Google Play te downloaden. De app is niet per se nodig om gebruik te kunnen maken van de robot.

© ap.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
24-06-2014
Japan stelt robotnieuwslezeressen voor
© epa.
Ze heet 'Kodomoroid', een mix van het Japanse woord 'kodomo', wat kind betekent, en 'androïde'. Voor stomverbaasde journalisten las ze dinsdag het nieuws voor als een echt televisienieuwsanker tijdens een sessie in het nationaal wetenschappelijk en technologisch museum in Tokio.
De meisjesrobot Kodomoroid (links) heeft ook een oudere collega Otonaroid (rechts). © epa.
Na het laatste nieuws over een aardbeving en een FBI-operatie, liet Kodomoroid zich meedragen door haar uitvinder, de specialist roboticaHiroshi Ishiguro. Kodomoroid deelde de hoofdrol met een andere vrouwelijke robot, 'Otonaroid', een samenstelling van 'otona' ('volwassene') en 'androïde'. Beide robots lijken echter dan echt.
De androids zullen in het museum aan de slag gaan als bezoekerscontact en de menselijke reacties op hen opslaan.
(HLN)
Japan stelt robotnieuwslezeressen voor

© epa.
Ze heet 'Kodomoroid', een mix van het Japanse woord 'kodomo', wat kind betekent, en 'androïde'. Voor stomverbaasde journalisten las ze dinsdag het nieuws voor als een echt televisienieuwsanker tijdens een sessie in het nationaal wetenschappelijk en technologisch museum in Tokio.

De meisjesrobot Kodomoroid (links) heeft ook een oudere collega Otonaroid (rechts). © epa.
Na het laatste nieuws over een aardbeving en een FBI-operatie, liet Kodomoroid zich meedragen door haar uitvinder, de specialist roboticaHiroshi Ishiguro. Kodomoroid deelde de hoofdrol met een andere vrouwelijke robot, 'Otonaroid', een samenstelling van 'otona' ('volwassene') en 'androïde'. Beide robots lijken echter dan echt.
De androids zullen in het museum aan de slag gaan als bezoekerscontact en de menselijke reacties op hen opslaan.

(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
15-07-2014
Robot wisselt tussen harde en zachte vorm
Dankzij een nieuw materiaal dat gemakkelijk van fase verandert, kunnen toekomstige robots schakelen tussen een harde en een zachte vorm. Het materiaal kan bovendien zichzelf repareren.
Links is het materiaal hard. Rechts is de was wat opgewarmd, waardoor het materiaal gemakkelijk buigt onder druk. Bron: Anette Hosoi/MIT
Bron: Anette Hosoi/MIT
Onderzoekers van de Massachusetts Institute of Technology onthulden het nieuwe materiaal in het vakblad Macromolecular Materials and Engineering. Het goedje bestaat uit schuim van polyurethaan, met daarover een laagje was. Als het materiaal indeukt, zorgt het schuim ervoor dat het weer gemakkelijk terug springt naar zijn oorspronkelijke vorm. De waslaag zorgt ervoor dat het materiaal kan schakelen tussen een harde en zachte toestand. Een stroomdraad die door de waslaag loopt, kan het materiaal verwarmen waardoor de was zijn hardheid verliest. Dit smelten zorgt er ook voor dat breuken in de waslaag verdwijnen, waardoor het materiaal zichzelf steeds repareert. De onderzoekers gebruikten een 3D-printer om hun materiaal een duidelijke roosterstructuur te geven.
Het materiaal springt gemakkelijk terug naar zijn oorspronkelijke vorm. Bron: Anette Hosoi/MIT
Klik op de AFBEELDING om de animatie te zien. Het materiaal springt gemakkelijk terug naar zijn oorspronkelijke vorm.
Bron: Anette Hosoi/MIT
Robot redt slachtoffers
Robots die dankzij het materiaal kunnen wisselen tussen een zachte en harde vorm, kunnen volgens de onderzoekers veel verschillende toepassingen krijgen. De robots kunnen zichzelf zacht en klein maken om zich door een nauwe ruimte te persen, en vervolgens weer hun oorspronkelijke vorm aannemen. Daardoor kan de robot bijvoorbeeld in het puin van ingestorte gebouwen naar slachtoffers zoeken. De was stelt de robot in staat om (een deel van zichzelf) te verharden, zodat hij vervolgens brokstukken kan oppakken of ruiten in kan slaan. Voor het harde werk zou het waslaagje zelfs plaats kunnen maken voor een ander smeltbaar materiaal, zoals soldeertin.
(newscientist.nl)
Robot wisselt tussen harde en zachte vorm
Dankzij een nieuw materiaal dat gemakkelijk van fase verandert, kunnen toekomstige robots schakelen tussen een harde en een zachte vorm. Het materiaal kan bovendien zichzelf repareren.

Links is het materiaal hard. Rechts is de was wat opgewarmd, waardoor het materiaal gemakkelijk buigt onder druk. Bron: Anette Hosoi/MIT
Bron: Anette Hosoi/MIT
Onderzoekers van de Massachusetts Institute of Technology onthulden het nieuwe materiaal in het vakblad Macromolecular Materials and Engineering. Het goedje bestaat uit schuim van polyurethaan, met daarover een laagje was. Als het materiaal indeukt, zorgt het schuim ervoor dat het weer gemakkelijk terug springt naar zijn oorspronkelijke vorm. De waslaag zorgt ervoor dat het materiaal kan schakelen tussen een harde en zachte toestand. Een stroomdraad die door de waslaag loopt, kan het materiaal verwarmen waardoor de was zijn hardheid verliest. Dit smelten zorgt er ook voor dat breuken in de waslaag verdwijnen, waardoor het materiaal zichzelf steeds repareert. De onderzoekers gebruikten een 3D-printer om hun materiaal een duidelijke roosterstructuur te geven.

Het materiaal springt gemakkelijk terug naar zijn oorspronkelijke vorm. Bron: Anette Hosoi/MIT
Klik op de AFBEELDING om de animatie te zien. Het materiaal springt gemakkelijk terug naar zijn oorspronkelijke vorm.
Bron: Anette Hosoi/MIT
Robot redt slachtoffers
Robots die dankzij het materiaal kunnen wisselen tussen een zachte en harde vorm, kunnen volgens de onderzoekers veel verschillende toepassingen krijgen. De robots kunnen zichzelf zacht en klein maken om zich door een nauwe ruimte te persen, en vervolgens weer hun oorspronkelijke vorm aannemen. Daardoor kan de robot bijvoorbeeld in het puin van ingestorte gebouwen naar slachtoffers zoeken. De was stelt de robot in staat om (een deel van zichzelf) te verharden, zodat hij vervolgens brokstukken kan oppakken of ruiten in kan slaan. Voor het harde werk zou het waslaagje zelfs plaats kunnen maken voor een ander smeltbaar materiaal, zoals soldeertin.
(newscientist.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
24-08-2014
Zullen robots ons in de toekomst vermoorden?
[img]http://static1.hln.be/static/photo/2014/10/9/6/20140824114002/media_xll_7031226.jpg
[/img]© thinkstock.
De technologie rond robots springt met rasse schreden vooruit. Dat voorspelt veel voordelen, maar ook nadelen. Specialiste Nell Watson waarschuwt de wereld dat we de intelligente apparaten ook beter wat menselijkheid leren, voor ze ons allemaal vermoorden uit vriendelijkheid.
Robots naderen momenteel de intelligentie van bijen, wat betekent dat ze een sociaal bewustzijn creëren en doorheen hun omgeving kunnen navigeren.
Concreet wil dit zeggen dat ze het stadium van 'systeem 2 denken' achterlaten. De intelligentie die gebaseerd was op regels maakt plaats voor 'systeem 1 denken', waarbij robots conclusies kunnen trekken en zaken kunnen veronderstellen uit hun omgeving.
Goed nieuws voor wie niet graag opruimt, want robots zullen in de toekomst kunnen helpen bij huishoudelijke taakjes. Ook de medische wereld zou bijvoorbeeld kunnen genieten van deze technologische vooruitgang. Toch stelt Watson zich hier enkele vragen bij.
"Ik vraag me echt af hoe we zullen leven", aldus Watson. "Zullen onze artificieel intelligente vriendjes vriendelijk of onvriendelijk zijn?" Volgens haar moeten we de robots de waarde van menselijkheid zien aan te leren. "Voor ze ons allemaal uitmoorden voor ons eigen goed."
(HLN)
Zullen robots ons in de toekomst vermoorden?
[img]http://static1.hln.be/static/photo/2014/10/9/6/20140824114002/media_xll_7031226.jpg
[/img]© thinkstock.
De technologie rond robots springt met rasse schreden vooruit. Dat voorspelt veel voordelen, maar ook nadelen. Specialiste Nell Watson waarschuwt de wereld dat we de intelligente apparaten ook beter wat menselijkheid leren, voor ze ons allemaal vermoorden uit vriendelijkheid.
Robots naderen momenteel de intelligentie van bijen, wat betekent dat ze een sociaal bewustzijn creëren en doorheen hun omgeving kunnen navigeren.
Concreet wil dit zeggen dat ze het stadium van 'systeem 2 denken' achterlaten. De intelligentie die gebaseerd was op regels maakt plaats voor 'systeem 1 denken', waarbij robots conclusies kunnen trekken en zaken kunnen veronderstellen uit hun omgeving.
Goed nieuws voor wie niet graag opruimt, want robots zullen in de toekomst kunnen helpen bij huishoudelijke taakjes. Ook de medische wereld zou bijvoorbeeld kunnen genieten van deze technologische vooruitgang. Toch stelt Watson zich hier enkele vragen bij.
"Ik vraag me echt af hoe we zullen leven", aldus Watson. "Zullen onze artificieel intelligente vriendjes vriendelijk of onvriendelijk zijn?" Volgens haar moeten we de robots de waarde van menselijkheid zien aan te leren. "Voor ze ons allemaal uitmoorden voor ons eigen goed."
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
22-08-2014
Liftende robot voltooit zijn reis dwars door Canada
Kan een robot van de ene naar de andere kant van Canada reizen door te liften? Ja! HitchBOT is – na een reis die startte in Halifax en meer dan 6000 kilometer lang was – in Victoria gearriveerd. Met dank aan tal van automobilisten!
De robot startte zijn grote avontuur eind juli. Uitgerust met bewegende armen, een camera, een glimlach en een vriendelijk praatje moest deze verschillende automobilisten zo ver zien te krijgen dat ze hem in de auto zetten en hielpen om zijn lange reis van de ene naar de andere kant van Canada te volbrengen. “Meestal maken we ons zorgen over of we robots wel kunnen vertrouwen,” vertelde onderzoeker Frauke Zeller, kort voor de mede door haar ontwikkelde robot aan zijn reis begon. “Dit project stelt de vraag: kunnen robots mensen vertrouwen? HitchBOT moet vertrouwen op mensen om zich te verplaatsen en laat zich daarbij onder meer door mensen in een gordel vastzetten,” voegde onderzoeker David Harris Smith toe.
En nu blijkt dat robots – of in ieder geval HitchBOT – vertrouwen heeft in de mensheid. Na bijna een maand onderweg te zijn geweest is de robot in Victoria gearriveerd. Niet helemaal heelhuids, overigens. Zo praat de robot niet meer zo vlotjes als aan het begin van de reis en zit er een scheur in het plastic dat zijn LED-schermen moest beschermen. Maar dat is ongetwijfeld allemaal per ongeluk gegaan.
De onderzoekers mogen dan ook tevreden terugkijken op hun experiment, bedoeld om meer te weten te komen over de interactie tussen robots en mensen. HitchBOT – die kan praten, vol met grappige feitjes zit en vragen kan beantwoorden – bleek charmant en sociaal genoeg om in totale afhankelijkheid van mensen de reis dwars door Canada te voltooien
(scientias.nl)
Liftende robot voltooit zijn reis dwars door Canada

Kan een robot van de ene naar de andere kant van Canada reizen door te liften? Ja! HitchBOT is – na een reis die startte in Halifax en meer dan 6000 kilometer lang was – in Victoria gearriveerd. Met dank aan tal van automobilisten!
De robot startte zijn grote avontuur eind juli. Uitgerust met bewegende armen, een camera, een glimlach en een vriendelijk praatje moest deze verschillende automobilisten zo ver zien te krijgen dat ze hem in de auto zetten en hielpen om zijn lange reis van de ene naar de andere kant van Canada te volbrengen. “Meestal maken we ons zorgen over of we robots wel kunnen vertrouwen,” vertelde onderzoeker Frauke Zeller, kort voor de mede door haar ontwikkelde robot aan zijn reis begon. “Dit project stelt de vraag: kunnen robots mensen vertrouwen? HitchBOT moet vertrouwen op mensen om zich te verplaatsen en laat zich daarbij onder meer door mensen in een gordel vastzetten,” voegde onderzoeker David Harris Smith toe.
En nu blijkt dat robots – of in ieder geval HitchBOT – vertrouwen heeft in de mensheid. Na bijna een maand onderweg te zijn geweest is de robot in Victoria gearriveerd. Niet helemaal heelhuids, overigens. Zo praat de robot niet meer zo vlotjes als aan het begin van de reis en zit er een scheur in het plastic dat zijn LED-schermen moest beschermen. Maar dat is ongetwijfeld allemaal per ongeluk gegaan.
De onderzoekers mogen dan ook tevreden terugkijken op hun experiment, bedoeld om meer te weten te komen over de interactie tussen robots en mensen. HitchBOT – die kan praten, vol met grappige feitjes zit en vragen kan beantwoorden – bleek charmant en sociaal genoeg om in totale afhankelijkheid van mensen de reis dwars door Canada te voltooien
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
16-09-2014
Robot-cheeta loopt op eigen kracht rond op campus MIT
Na jaren onderzoek is het Robotics Lab van de prestigieuze universiteit MIT erin geslaagd een robot-cheeta op eigen kracht te doen rondlopen. Het 'dier' behaalt voorlopig een snelheid van 16 kilometer per uur en springt over obstakels van 30 centimeter hoog.
De robot werd ontwikkeld met het oog op toekomstige zoek- en reddingsoperaties. Het project is daarom gefinancierd door het Amerikaanse leger. Belangrijk is dat de cheeta op eigen kracht kan rondlopen en obstakels kan vermijden, zonder dat daar kabels of draden aan te pas komen. Hij wordt gestuurd door een algoritme, dat de kracht van elke voet heel precies controleert.
Tijdens een eerste test op de campus behaalde de robot een snelheid van 16 kilometer per uur en maakte hij gecontroleerde sprongen over obstakels van 30 centimeter hoog. De onderzoekers van het Robotics Lab, een labo dat zich uitsluitend bezighoudt met robots die biologische organismen nabootsen, maken zich sterk dat hun cheeta binnenkort snelheden haalt van 50 kilometer per uur. Dat is sneller dan 's werelds snelste mens, Ussain Bolt. Diens topsnelheid staat op 43,93 kilometer per uur.
Deze cheetah is niet het eerste robotdier dat vrij rondloopt. Boston Dynamics, een bedrijf dat werd opgericht door voormalige MIT-onderzoekers en later werd overgenomen door Google, lanceerde een jaar geleden de WildCat-robot die nog hogere snelheden haalde.
(HLN)
Robot-cheeta loopt op eigen kracht rond op campus MIT

Na jaren onderzoek is het Robotics Lab van de prestigieuze universiteit MIT erin geslaagd een robot-cheeta op eigen kracht te doen rondlopen. Het 'dier' behaalt voorlopig een snelheid van 16 kilometer per uur en springt over obstakels van 30 centimeter hoog.
De robot werd ontwikkeld met het oog op toekomstige zoek- en reddingsoperaties. Het project is daarom gefinancierd door het Amerikaanse leger. Belangrijk is dat de cheeta op eigen kracht kan rondlopen en obstakels kan vermijden, zonder dat daar kabels of draden aan te pas komen. Hij wordt gestuurd door een algoritme, dat de kracht van elke voet heel precies controleert.
Tijdens een eerste test op de campus behaalde de robot een snelheid van 16 kilometer per uur en maakte hij gecontroleerde sprongen over obstakels van 30 centimeter hoog. De onderzoekers van het Robotics Lab, een labo dat zich uitsluitend bezighoudt met robots die biologische organismen nabootsen, maken zich sterk dat hun cheeta binnenkort snelheden haalt van 50 kilometer per uur. Dat is sneller dan 's werelds snelste mens, Ussain Bolt. Diens topsnelheid staat op 43,93 kilometer per uur.
Deze cheetah is niet het eerste robotdier dat vrij rondloopt. Boston Dynamics, een bedrijf dat werd opgericht door voormalige MIT-onderzoekers en later werd overgenomen door Google, lanceerde een jaar geleden de WildCat-robot die nog hogere snelheden haalde.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
23-09-2014
Robot spoort objecten op met ‘ben ik warm?’-spelletje
Als robots straks in onze huizen gaan werken, is het belangrijk dat ze objecten kunnen opsporen en herkennen. En dat is zojuist ietsje gemakkelijker geworden. Wetenschappers hebben de bekende robot PR2 uitgerust met RFID-technologie.
RFID staat voor Radio-Frequency Identification. Het is vrij simpel. Objecten krijgen een goedkope RFID-tag opgeplakt. Deze tag geeft een uniek signaal af. De robot kan dat signaal opvangen. Wanneer de robot een bepaald object moet zoeken, speurt hij de kamer af naar het juiste signaal. Zodra hij het signaal heeft gedetecteerd, weet de robot dat het object dat hij zoekt niet ver weg is. “Maar RFID vertelt de robot niet waar het object is,” benadrukt onderzoeker Charlie Kemp. “Om het object daadwerkelijk te vinden en erbij in de buurt te komen, moet de robot slim zijn.”
Antennes
De onderzoekers bevestigden de antennes die de signalen van objecten moeten detecteren op de schouders van robot PR2. Wanneer de robot verder van het object verwijderd is, is het signaal zwakker dan wanneer het object dichtbij is. Zodra de robot het signaal gedetecteerd heeft, draait deze zijn schouders en rijdt hij door de kamer om te kijken wat dat met het signaal doet. Wordt het signaal sterker, dan begeeft hij zich in de juiste richting. Wordt het zwakker, dan moet hij omdraaien. Het is te vergelijken met het bekende warmer/kouder-spelletje dat kinderen soms spelen.
Veelbelovend
De resultaten zijn veelbelovend, zo stelt onderzoeker Matthew Reynolds. “Hoewel wij deze technologie met behulp van slechts een paar huishoudelijke objecten hebben gedemonstreerd, kunnen de RFID-tags gebruikt worden om miljarden verschillende objecten zonder problemen te identificeren. Dat is belangrijk, omdat veel objecten op elkaar lijken, maar toch uniek zijn. Denk bijvoorbeeld aan het identificeren van een potje medicijnen dat naar een specifieke persoon moet worden gebracht.”
Met een klein aantal aanpassingen aan de objecten in je huis kan een robot je bezittingen snel in kaart brengen en navigeren naar een object dat je wilt hebben,” stelt Kemp. “Ben je op zoek naar iets? De robot laat je zien waar het is.”
(Scientias.nl)
Robot spoort objecten op met ‘ben ik warm?’-spelletje

Als robots straks in onze huizen gaan werken, is het belangrijk dat ze objecten kunnen opsporen en herkennen. En dat is zojuist ietsje gemakkelijker geworden. Wetenschappers hebben de bekende robot PR2 uitgerust met RFID-technologie.
RFID staat voor Radio-Frequency Identification. Het is vrij simpel. Objecten krijgen een goedkope RFID-tag opgeplakt. Deze tag geeft een uniek signaal af. De robot kan dat signaal opvangen. Wanneer de robot een bepaald object moet zoeken, speurt hij de kamer af naar het juiste signaal. Zodra hij het signaal heeft gedetecteerd, weet de robot dat het object dat hij zoekt niet ver weg is. “Maar RFID vertelt de robot niet waar het object is,” benadrukt onderzoeker Charlie Kemp. “Om het object daadwerkelijk te vinden en erbij in de buurt te komen, moet de robot slim zijn.”
Antennes
De onderzoekers bevestigden de antennes die de signalen van objecten moeten detecteren op de schouders van robot PR2. Wanneer de robot verder van het object verwijderd is, is het signaal zwakker dan wanneer het object dichtbij is. Zodra de robot het signaal gedetecteerd heeft, draait deze zijn schouders en rijdt hij door de kamer om te kijken wat dat met het signaal doet. Wordt het signaal sterker, dan begeeft hij zich in de juiste richting. Wordt het zwakker, dan moet hij omdraaien. Het is te vergelijken met het bekende warmer/kouder-spelletje dat kinderen soms spelen.
Veelbelovend
De resultaten zijn veelbelovend, zo stelt onderzoeker Matthew Reynolds. “Hoewel wij deze technologie met behulp van slechts een paar huishoudelijke objecten hebben gedemonstreerd, kunnen de RFID-tags gebruikt worden om miljarden verschillende objecten zonder problemen te identificeren. Dat is belangrijk, omdat veel objecten op elkaar lijken, maar toch uniek zijn. Denk bijvoorbeeld aan het identificeren van een potje medicijnen dat naar een specifieke persoon moet worden gebracht.”
Met een klein aantal aanpassingen aan de objecten in je huis kan een robot je bezittingen snel in kaart brengen en navigeren naar een object dat je wilt hebben,” stelt Kemp. “Ben je op zoek naar iets? De robot laat je zien waar het is.”
(Scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
28-09-2014
Robonaut gaat ruimtewandelen
Robonaut-2, sinds 2011 in het ISS, wordt voorbereid op werken buiten het ruimtestation.
Drie jaar moest de robot het zonder benen stellen: zijn torso was gefixeerd op een voetstuk. Hij leerde knoppen en schakelaars bedienen en objecten vangen.
April dit jaar voerde een Dragon-ruimteschip ‘space legs’ aan, die deze maand zijn gemonteerd. Robonaut kan nu ingezet worden voor montagewerk in en buiten het ruimtestation. Naar verwachting zal hij binnen een half jaar, bestuurd door een astronaut in het ISS, zijn eerste ruimtewandeling maken. Dat is vijftig jaar nadat een mens dat voor het eerst deed: Alexei Leonov in 1965.
(Technischweekblad.nl)
Robonaut gaat ruimtewandelen

Robonaut-2, sinds 2011 in het ISS, wordt voorbereid op werken buiten het ruimtestation.
Drie jaar moest de robot het zonder benen stellen: zijn torso was gefixeerd op een voetstuk. Hij leerde knoppen en schakelaars bedienen en objecten vangen.
April dit jaar voerde een Dragon-ruimteschip ‘space legs’ aan, die deze maand zijn gemonteerd. Robonaut kan nu ingezet worden voor montagewerk in en buiten het ruimtestation. Naar verwachting zal hij binnen een half jaar, bestuurd door een astronaut in het ISS, zijn eerste ruimtewandeling maken. Dat is vijftig jaar nadat een mens dat voor het eerst deed: Alexei Leonov in 1965.
(Technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
30-09-2014
Zorgrobot op komst
Zorgrobotje Paro
Een robot die snel koffie zet, het is niet meer sciencefiction. Psychologen en computerwetenschappers ontwikkelden een model dat codeert hoe mensen dit soort alledaagse handelingen verrichten. Het nieuwe model vanuit Leiden is 500 keer sneller dan eerdere programma’s.
Er waren al computermodellen voor dit soort huishoudelijke taken, maar die zijn complex en omslachtig, aldus de Leidse onderzoeker Roy de Kleijn. ‘Robots konden door een lang proces van trial and error deze taken uitvoeren. Het nieuwe model heeft 500 keer minder voorbeelden nodig dan eerdere modellen door de feedback-loop die geïnspireerd is door het menselijk brein. De robot krijgt direct infomatie over zijn acties en krijgt de kans om zijn acties te veranderen waardoor hij het gewenste gedrag kan vertonen.’
Hersenen nagebootst
De Kleijn ontwikkelde het model samen met de Leidse hoogleraar algemene psychologie Bernhard Hommel en drie buitenlandse onderzoekers. Zij publiceerden 29 september hun bevindingen in het tijdschrift Philosophical Transactions of the Royal Society B.
De onderzoekers bootsten de werking na van de neocortex, het deel van de hersenen dat verantwoordelijk is voor de planning van taken. Met een simulatieprogramma codeerden zij een aantal alledaagse handelingen als koffie- en theezetten. Het model bevat kortetermijnvoorspellingen en samen met de feedback loop kunnen taken doelgericht uitgevoerd worden, aldus De Kleijn.
Nu echt gaan bouwen
De onderzoekers testten hun model met een simulatieprogramma. In de volgende fase willen ze het programma daadwerkelijk inbouwen bij een robot. In de zorg wordt al gebruik gemaakt van robots die stofzuigen of assisteren bij operaties. Wanneer komt de theezettende robot op de markt? ‘Dat zal nog wel even duren. Over vijf jaar hebben we misschien een robot die één zo’n specifieke taak goed en snel kan uitvoeren. Maar een zorgrobot wordt pas echt interessant als hij veel meer taken uitvoeren. En die ontwikkeling zal nog jaren duren.’
Het onderzoek maakt deel uit van een samenwerkingsverband tussen Universiteit Leiden als onderdeel van het EU-consortium RoboHow, en onderzoekers van de University of Colorado, Boulder. Meer over zorgrobots lees u onder meer hier.
(scienceguide.nl)
Zorgrobot op komst

Zorgrobotje Paro
Een robot die snel koffie zet, het is niet meer sciencefiction. Psychologen en computerwetenschappers ontwikkelden een model dat codeert hoe mensen dit soort alledaagse handelingen verrichten. Het nieuwe model vanuit Leiden is 500 keer sneller dan eerdere programma’s.
Er waren al computermodellen voor dit soort huishoudelijke taken, maar die zijn complex en omslachtig, aldus de Leidse onderzoeker Roy de Kleijn. ‘Robots konden door een lang proces van trial and error deze taken uitvoeren. Het nieuwe model heeft 500 keer minder voorbeelden nodig dan eerdere modellen door de feedback-loop die geïnspireerd is door het menselijk brein. De robot krijgt direct infomatie over zijn acties en krijgt de kans om zijn acties te veranderen waardoor hij het gewenste gedrag kan vertonen.’
Hersenen nagebootst
De Kleijn ontwikkelde het model samen met de Leidse hoogleraar algemene psychologie Bernhard Hommel en drie buitenlandse onderzoekers. Zij publiceerden 29 september hun bevindingen in het tijdschrift Philosophical Transactions of the Royal Society B.
De onderzoekers bootsten de werking na van de neocortex, het deel van de hersenen dat verantwoordelijk is voor de planning van taken. Met een simulatieprogramma codeerden zij een aantal alledaagse handelingen als koffie- en theezetten. Het model bevat kortetermijnvoorspellingen en samen met de feedback loop kunnen taken doelgericht uitgevoerd worden, aldus De Kleijn.
Nu echt gaan bouwen
De onderzoekers testten hun model met een simulatieprogramma. In de volgende fase willen ze het programma daadwerkelijk inbouwen bij een robot. In de zorg wordt al gebruik gemaakt van robots die stofzuigen of assisteren bij operaties. Wanneer komt de theezettende robot op de markt? ‘Dat zal nog wel even duren. Over vijf jaar hebben we misschien een robot die één zo’n specifieke taak goed en snel kan uitvoeren. Maar een zorgrobot wordt pas echt interessant als hij veel meer taken uitvoeren. En die ontwikkeling zal nog jaren duren.’
Het onderzoek maakt deel uit van een samenwerkingsverband tussen Universiteit Leiden als onderdeel van het EU-consortium RoboHow, en onderzoekers van de University of Colorado, Boulder. Meer over zorgrobots lees u onder meer hier.
(scienceguide.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
07-10-2014
Deze killer robots vechten in 2020 onze oorlogen uit
Militairen hoeven in 2020 niet meer naar Irak en Syrië af te reizen: dan verrichten killer robots het werk. Bekijk hier hoe ze eruitzien, die robots die mensenlevens kunnen beëindigen.
Sciencefiction is het allang niet meer. De ontwikkeling van killer robots gaat zo snel dat vredesactivisten er een groot gevaar in zien en er een verbod op eisen. Geen F-16’s meer en piloten die kant op. Zelfs geen op afstand bestuurde drones. Alleen vliegtuigen die zelf vliegen, zelf hun doel kiezen en het zelf overhoop schieten.
X-47B
De X-47B is een donkergrijze vleugel met een spanwijdte van negentien meter. De VS willen dat deze vliegende vleugel zelf vijandelijke doelen opspoort en vernietigt.
DE MULE
De Mule is geen killer robot, maar een robotisch paksysteem: een robot die zich op ruig gebied kan verplaatsen, en daarbij bagage van militairen kan meezeulen.
DE GUARDIUM
De Guardium is een gepantserde robotwagen die zelfstandig kan terugschieten.
DE FALCON
De Falcon is een onbemand gevechtsvliegtuig dat zowat 21.000 kilometer per uur kan vliegen.
SGR-A1
De SGR-A1 is een robotische bewaker. De robot is ontworpen om mensen te vervangen in de gedemilitariseerde zone aan de Zuid- en Noord-Koreaanse grens.
ZIJN ER OOK NADELEN?
De Britse robotprofessor Noel Sharkey maakt zich zorgen over de killer robots. Hij ziet verschillende bezwaren, zegt hij vandaag in nrc.next:
“Het grootste bezwaar is dat ze altijd minder goed dan mensen in staat zullen zijn om onderscheid te maken op het slagveld. Stel dat een robot ooit eigen en vijandelijke uniformen van elkaar kan onderscheiden, bijvoorbeeld op basis van chips in de kleding. Dan nog zal een robot geen onderscheid maken tussen vijandelijke strijders die doorvechten en zij die zich met hun handen omhoog overgeven. Hij zal ze allemaal neerschieten.
“En als hij wordt geprogrammeerd om strijders met hun handen omhoog met rust te laten, dan zal de vijand met handen in de lucht op de robots aflopen. Robots die zelf beslissen over leven en dood zijn een recept voor grote ongelukken. Misschien niet zozeer aan de zijde van de partij die ze inzet, maar wel aan de andere zijde. Het aantal burgerslachtoffers zou door robots die fouten maken verder omhoog kunnen gaan.”
(nrc.nl)
Deze killer robots vechten in 2020 onze oorlogen uit
Militairen hoeven in 2020 niet meer naar Irak en Syrië af te reizen: dan verrichten killer robots het werk. Bekijk hier hoe ze eruitzien, die robots die mensenlevens kunnen beëindigen.
Sciencefiction is het allang niet meer. De ontwikkeling van killer robots gaat zo snel dat vredesactivisten er een groot gevaar in zien en er een verbod op eisen. Geen F-16’s meer en piloten die kant op. Zelfs geen op afstand bestuurde drones. Alleen vliegtuigen die zelf vliegen, zelf hun doel kiezen en het zelf overhoop schieten.


X-47B
De X-47B is een donkergrijze vleugel met een spanwijdte van negentien meter. De VS willen dat deze vliegende vleugel zelf vijandelijke doelen opspoort en vernietigt.

DE MULE
De Mule is geen killer robot, maar een robotisch paksysteem: een robot die zich op ruig gebied kan verplaatsen, en daarbij bagage van militairen kan meezeulen.

DE GUARDIUM
De Guardium is een gepantserde robotwagen die zelfstandig kan terugschieten.
DE FALCON

De Falcon is een onbemand gevechtsvliegtuig dat zowat 21.000 kilometer per uur kan vliegen.

SGR-A1
De SGR-A1 is een robotische bewaker. De robot is ontworpen om mensen te vervangen in de gedemilitariseerde zone aan de Zuid- en Noord-Koreaanse grens.

ZIJN ER OOK NADELEN?
De Britse robotprofessor Noel Sharkey maakt zich zorgen over de killer robots. Hij ziet verschillende bezwaren, zegt hij vandaag in nrc.next:
“Het grootste bezwaar is dat ze altijd minder goed dan mensen in staat zullen zijn om onderscheid te maken op het slagveld. Stel dat een robot ooit eigen en vijandelijke uniformen van elkaar kan onderscheiden, bijvoorbeeld op basis van chips in de kleding. Dan nog zal een robot geen onderscheid maken tussen vijandelijke strijders die doorvechten en zij die zich met hun handen omhoog overgeven. Hij zal ze allemaal neerschieten.
“En als hij wordt geprogrammeerd om strijders met hun handen omhoog met rust te laten, dan zal de vijand met handen in de lucht op de robots aflopen. Robots die zelf beslissen over leven en dood zijn een recept voor grote ongelukken. Misschien niet zozeer aan de zijde van de partij die ze inzet, maar wel aan de andere zijde. Het aantal burgerslachtoffers zou door robots die fouten maken verder omhoog kunnen gaan.”
(nrc.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
hier veder
W&T / Robotica #3
W&T / Robotica #3
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...