W&T Wetenschap & Technologie
Een plek om te discussiëren over wetenschappelijke onderwerpen, wetenschappelijke problemen, technologische projecten en grootse uitvindingen.



Dafuq, oke dat ding is misschien tergend langzaam (hoelang duurde het hem om 3 tijdschriften recht te leggen?  ) Maar als ik dit ding aan kan zitten als ik naar werk ga ik en ik zie een opgeruimd huis als ik terug dan zeg ik "Shut up and take my money!"
) Maar als ik dit ding aan kan zitten als ik naar werk ga ik en ik zie een opgeruimd huis als ik terug dan zeg ik "Shut up and take my money!" 
Zal helaas wel veel programmeer/instel werk vooraf aan gaan.
Edit: nevermind, het gaat om 'teleoperation', dat betekend dat iemand dat ding bestuurd van een afstand lijkt me.
Zal helaas wel veel programmeer/instel werk vooraf aan gaan.
Edit: nevermind, het gaat om 'teleoperation', dat betekend dat iemand dat ding bestuurd van een afstand lijkt me.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

Oja, zie het nu ook.quote:Op dinsdag 25 september 2012 01:25 schreef Eyjafjallajoekull het volgende:
Dafuq, oke dat ding is misschien tergend langzaam (hoelang duurde het hem om 3 tijdschriften recht te leggen?
Zal helaas wel veel programmeer/instel werk vooraf aan gaan.
Edit: nevermind, het gaat om 'teleoperation', dat betekend dat iemand dat ding bestuurd van een afstand lijkt me.
Achja, dan huur je toch gewoon iemand in om dat ding te besturen
Inderdaad, hoeft de schoonmaakster niet eens meer het huis uitquote:Op dinsdag 25 september 2012 19:57 schreef Mender het volgende:
[..]
Oja, zie het nu ook.
Achja, dan huur je toch gewoon iemand in om dat ding te besturen
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
27-09-2012
Gamebot doorstaat turingtest
Een computergestuurde tegenstander overtuigde gamers voor het eerst dat ze tegen een mens aan het spelen waren. Daarmee slaagde dit staaltje kunstmatige intelligentie met vlag en wimpel voor de turingtest.
Tijdens een potje Unreal Tournament 2004, waarin gamers het tegen elkaar opnemen, beoordeelden medespelers dat een virtuele, kunstmatige intelligente speler wel menselijk moest zijn.
De bot, UT^2 genaamd, werd gemaakt door computerwetenschappers aan de universiteit van Texas. UT^2 nam deel aan een spel waarin spelers het tegen elkaar opnemen in een zogenaamde first-person shooter. De helft van de deelnemers was virtueel, de helft mens. Het was aan de menselijke spelers om tijdens het spelen hun tegenstanders te beoordelen op menselijkheid. Daarvoor werden de spelpersonages uitgerust met een ‘beoordelingsgeweer’, waarmee tegenstanders konden worden gemerkt als bot of mens. UT^2 kreeg van 52 procent van de gamers het oordeel menselijk te zijn. Daartegenover kregen menselijke spelers gemiddeld een score van slechts 40 procent.
Daarmee slaagde UT^2 als eerste bot voor de beroemde turingtest. Deze test geldt als een maatstaf voor het menselijk overkomen van machines. De test is vernoemd naar de wiskundige Alan Turing. Hij stelde dat echte kunstmatige intelligentie kan worden bewezen als een machine proefpersonen overtuigt dat ze een mens tegenover zich hebben.
Om dit te bereiken, gaven de makers van UT^2 hun bot irrationeel, maar menselijk gedrag mee. Zo kon de bot de pik krijgen op een speler die hem steeds dwarsboomde, waardoor hij meer aandacht aan die persoon besteedde dan gunstig was. Ook verslechterde de nauwkeurigheid van zijn schoten wanneer de virtuele speler aan het rennen was of op een chaotische plek terecht kwam.
De onderzoekers zien veel toepassingen voor intelligente bots in de toekomst. Zo zullen niet alleen spelletjes spannender worden, het kan ook worden gebruikt in robots die met mensen zullen werken.
Ans Hekkenberg
(nwtonline.nl)
Gamebot doorstaat turingtest

Een computergestuurde tegenstander overtuigde gamers voor het eerst dat ze tegen een mens aan het spelen waren. Daarmee slaagde dit staaltje kunstmatige intelligentie met vlag en wimpel voor de turingtest.
Tijdens een potje Unreal Tournament 2004, waarin gamers het tegen elkaar opnemen, beoordeelden medespelers dat een virtuele, kunstmatige intelligente speler wel menselijk moest zijn.
De bot, UT^2 genaamd, werd gemaakt door computerwetenschappers aan de universiteit van Texas. UT^2 nam deel aan een spel waarin spelers het tegen elkaar opnemen in een zogenaamde first-person shooter. De helft van de deelnemers was virtueel, de helft mens. Het was aan de menselijke spelers om tijdens het spelen hun tegenstanders te beoordelen op menselijkheid. Daarvoor werden de spelpersonages uitgerust met een ‘beoordelingsgeweer’, waarmee tegenstanders konden worden gemerkt als bot of mens. UT^2 kreeg van 52 procent van de gamers het oordeel menselijk te zijn. Daartegenover kregen menselijke spelers gemiddeld een score van slechts 40 procent.
Daarmee slaagde UT^2 als eerste bot voor de beroemde turingtest. Deze test geldt als een maatstaf voor het menselijk overkomen van machines. De test is vernoemd naar de wiskundige Alan Turing. Hij stelde dat echte kunstmatige intelligentie kan worden bewezen als een machine proefpersonen overtuigt dat ze een mens tegenover zich hebben.
Om dit te bereiken, gaven de makers van UT^2 hun bot irrationeel, maar menselijk gedrag mee. Zo kon de bot de pik krijgen op een speler die hem steeds dwarsboomde, waardoor hij meer aandacht aan die persoon besteedde dan gunstig was. Ook verslechterde de nauwkeurigheid van zijn schoten wanneer de virtuele speler aan het rennen was of op een chaotische plek terecht kwam.
De onderzoekers zien veel toepassingen voor intelligente bots in de toekomst. Zo zullen niet alleen spelletjes spannender worden, het kan ook worden gebruikt in robots die met mensen zullen werken.
Ans Hekkenberg
(nwtonline.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
28-09-2012
Nieuwe robot moet Franse wijnboeren helpen
© afp.
In Frankrijk is een nieuwe robot onthuld die ontworpen is om wijngaarden te onderhouden. Het apparaat heeft zes camera's en twee armen. Dat meldt de BBC.
Kunstmatige intelligentie, opsporingstechnieken en digitale kaarten maken het mogelijk dat de robot zich van wijnrank naar wijnrank kan verplaatsen. De wijnranken worden van top tot teen gecontroleerd. Met zijn camera's herkent de robot de planten en onthoudt deze. Als het nodig is worden de takken gesnoeid.
Een laatste handige eigenschap van de robot is dat hij zijn eigenaar kan voorzien van waardevolle informatie over de kwaliteit van de aarde, de druiven en de rank. De robot kan zo'n 600 wijnranken per dag controleren en snoeien.
(HLN)
Nieuwe robot moet Franse wijnboeren helpen

© afp.
In Frankrijk is een nieuwe robot onthuld die ontworpen is om wijngaarden te onderhouden. Het apparaat heeft zes camera's en twee armen. Dat meldt de BBC.
Kunstmatige intelligentie, opsporingstechnieken en digitale kaarten maken het mogelijk dat de robot zich van wijnrank naar wijnrank kan verplaatsen. De wijnranken worden van top tot teen gecontroleerd. Met zijn camera's herkent de robot de planten en onthoudt deze. Als het nodig is worden de takken gesnoeid.
Een laatste handige eigenschap van de robot is dat hij zijn eigenaar kan voorzien van waardevolle informatie over de kwaliteit van de aarde, de druiven en de rank. De robot kan zo'n 600 wijnranken per dag controleren en snoeien.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Interessant! Even een filmpje erbij gezochtquote:
28-09-2012
Nieuwe robot moet Franse wijnboeren helpen

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
quote:
[..]
Interessant! Even een filmpje erbij gezocht
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
02-10-2012
Robocops: ze komen er nu echt aan!
Wetenschappers van de universiteit van Florida werken aan een heuse robocop. Ze bouwen daarvoor een robot die oorspronkelijk voor defensieve doeleinden werd gebouwd, om. Het is de bedoeling dat de robocops onder meer gaan surveilleren.
U zult misschien denken: dat gaat weer banen kosten. Maar dat is niet het geval. Het is de bedoeling dat de robots juist banen gaan opleveren. Het idee om robocops te bouwen, komt van Jeremy Robins. Hij betreurt het dat politieagenten en militairen die door geweld of een ongeluk gehandicapt raken niet meer in staat zijn om te doen wat ze het liefste doen: de samenleving dienen. Om deze groep mensen toch weer die rol te laten vervullen, bedacht hij dat een robocop ideaal zou zijn. De robocop is welbeschouwd een telerobot: de robot wordt van een afstandje door echte politieagenten bestuurd en dat is een schone taak voor mensen die tegen wil en dank niet meer in staat zijn om zelf politiewerk te doen. “Met telerobots kan een gehandicapte politieagent veel – misschien zelfs alle – functies van een normale agent uitvoeren: contacten met de samenleving, patrouilleren, reageren op noodoproepen,” somt Robins op.
Over telerobotica Telerobotica is niet nieuw: het wordt al in tal van velden toegepast. “Telerobotica heeft zijn weg al gevonden in de wereld van de geneeskunde, zakenwereld en het leger,” vertelt Robins. Hij vindt het dan ook een logische vervolgstap om telerobotica ook bij het handhaven van de wet in te zetten.
Lenen
Zelf is Robins niet in staat om zo’n robot te bouwen en dus nam hij zijn toevlucht tot het Discovery Lab van Florida International University. In het lab waren ze enthousiast over het idee. En gelukkig hoefden ze niet met niets te beginnen. Ze kregen twee robots die voor defensieve doeleinden waren gebouwd te leen en mogen deze om gaan bouwen tot robocops.
Lastig
Het bouwen van zo’n robocop is zo gemakkelijk nog niet. “We willen iets bouwen dat zo kan worden ingezet dat mensen het echt kunnen gebruiken,” vertelt professor Nagarajan Prabakar. “En we willen er zeker van zijn dat politiekorpsen zich zo’n robot kunnen veroorloven.” De robocops moeten zich goed kunnen bewegen, wendbaar zijn en kunnen communiceren. Al met al nog een hele klus. Maar de onderzoekers deinzen daar niet voor terug. “We gebruiken technologie om een persoon in staat te stellen een baan die ze anders niet zouden kunnen uitvoeren of die ze anders niet mogen uitvoeren, te doen. Deze mensen gingen bij de politie en het leger om hun land te dienen en nu kunnen ze dat vanwege een blessure niet meer zo goed. Ik weet niet hoe ik een aangetaste wervelkolom moet repareren, maar ze weer in staat stellen om te dienen en de wet weer te handhaven: dat denk ik dat we wel kunnen regelen.”
De onderzoekers werken nu hard aan een prototype. Een eerste schets ziet u bovenaan. Het is onduidelijk wanneer het eerste prototype klaar is, maar dankzij het verkrijgen van de twee robots heeft het lab alvast een vliegende start gemaakt.
(Scientias.nl)
Robocops: ze komen er nu echt aan!

Wetenschappers van de universiteit van Florida werken aan een heuse robocop. Ze bouwen daarvoor een robot die oorspronkelijk voor defensieve doeleinden werd gebouwd, om. Het is de bedoeling dat de robocops onder meer gaan surveilleren.
U zult misschien denken: dat gaat weer banen kosten. Maar dat is niet het geval. Het is de bedoeling dat de robots juist banen gaan opleveren. Het idee om robocops te bouwen, komt van Jeremy Robins. Hij betreurt het dat politieagenten en militairen die door geweld of een ongeluk gehandicapt raken niet meer in staat zijn om te doen wat ze het liefste doen: de samenleving dienen. Om deze groep mensen toch weer die rol te laten vervullen, bedacht hij dat een robocop ideaal zou zijn. De robocop is welbeschouwd een telerobot: de robot wordt van een afstandje door echte politieagenten bestuurd en dat is een schone taak voor mensen die tegen wil en dank niet meer in staat zijn om zelf politiewerk te doen. “Met telerobots kan een gehandicapte politieagent veel – misschien zelfs alle – functies van een normale agent uitvoeren: contacten met de samenleving, patrouilleren, reageren op noodoproepen,” somt Robins op.
Over telerobotica Telerobotica is niet nieuw: het wordt al in tal van velden toegepast. “Telerobotica heeft zijn weg al gevonden in de wereld van de geneeskunde, zakenwereld en het leger,” vertelt Robins. Hij vindt het dan ook een logische vervolgstap om telerobotica ook bij het handhaven van de wet in te zetten.
Lenen
Zelf is Robins niet in staat om zo’n robot te bouwen en dus nam hij zijn toevlucht tot het Discovery Lab van Florida International University. In het lab waren ze enthousiast over het idee. En gelukkig hoefden ze niet met niets te beginnen. Ze kregen twee robots die voor defensieve doeleinden waren gebouwd te leen en mogen deze om gaan bouwen tot robocops.
Lastig
Het bouwen van zo’n robocop is zo gemakkelijk nog niet. “We willen iets bouwen dat zo kan worden ingezet dat mensen het echt kunnen gebruiken,” vertelt professor Nagarajan Prabakar. “En we willen er zeker van zijn dat politiekorpsen zich zo’n robot kunnen veroorloven.” De robocops moeten zich goed kunnen bewegen, wendbaar zijn en kunnen communiceren. Al met al nog een hele klus. Maar de onderzoekers deinzen daar niet voor terug. “We gebruiken technologie om een persoon in staat te stellen een baan die ze anders niet zouden kunnen uitvoeren of die ze anders niet mogen uitvoeren, te doen. Deze mensen gingen bij de politie en het leger om hun land te dienen en nu kunnen ze dat vanwege een blessure niet meer zo goed. Ik weet niet hoe ik een aangetaste wervelkolom moet repareren, maar ze weer in staat stellen om te dienen en de wet weer te handhaven: dat denk ik dat we wel kunnen regelen.”
De onderzoekers werken nu hard aan een prototype. Een eerste schets ziet u bovenaan. Het is onduidelijk wanneer het eerste prototype klaar is, maar dankzij het verkrijgen van de twee robots heeft het lab alvast een vliegende start gemaakt.
(Scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Lol,
Ik denk eerder 'eerst zien dan geloven'. Aangezien ik voorlopig nog steeds niet een robot als beveiliger zie rondlopen...quote:U zult misschien denken: dat gaat weer banen kosten
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

03-10-2012
Zelfvliegende robot moet kunnen 'voelen'
Wetenschappers gaan het brein van honingbijen simuleren en de kunstmatige versie vervolgens verwerken in een vliegende robot die volledig zelfstandig moet kunnen bewegen.
Dat melden diverse buitenlandse media. De universiteiten van Sheffield en Sussex werken samen aan het project waarvoor zij omgerekend 1,25 miljoen euro subsidie hebben gekregen.
De wetenschappers willen in 2015 een zelfvliegende robot gemaakt hebben. De grootste uitdaging is de ontwikkeling van een gesimuleerd brein. De hersenen van bijen zijn volgens de onderzoekers bijzonder interessant.
.Bijen kunnen bijvoorbeeld hun weg terug naar de kolonie vinden. Ze gebruiken daarvoor waarschijnlijk de zon als oriëntatiepunt en berekenen de beweging van de zon om hun thuis terug te vinden.
De ontwikkeling van een dergelijke robot kan helpen bij reddingsmissies en het automatisch bestuiven van gewassen.
Chips
"Omdat het brein van een honingbij een stuk kleiner en toegankelijker is dan dat van gewervelde dieren, hopen we dat we uiteindelijk een accuraat en compleet model kunnen maken en dit kunnen testen in een vliegende robot", aldus één van de onderzoekers tegenover de BBC.
Het kunstmatige brein draait op krachtige grafische chips die geleverd zullen worden door Nvidia. Uiteindelijk hopen de wetenschappers dat de vliegende robot beslissingen zal nemen op basis van wat het 'voelt' in plaats van op basis van voorgeprogrammeerde taken zoals nu bij robots het geval is.
Door: NU.nl/Colin van Hoek .
(nu.nl)
Zelfvliegende robot moet kunnen 'voelen'
Wetenschappers gaan het brein van honingbijen simuleren en de kunstmatige versie vervolgens verwerken in een vliegende robot die volledig zelfstandig moet kunnen bewegen.

Dat melden diverse buitenlandse media. De universiteiten van Sheffield en Sussex werken samen aan het project waarvoor zij omgerekend 1,25 miljoen euro subsidie hebben gekregen.
De wetenschappers willen in 2015 een zelfvliegende robot gemaakt hebben. De grootste uitdaging is de ontwikkeling van een gesimuleerd brein. De hersenen van bijen zijn volgens de onderzoekers bijzonder interessant.
.Bijen kunnen bijvoorbeeld hun weg terug naar de kolonie vinden. Ze gebruiken daarvoor waarschijnlijk de zon als oriëntatiepunt en berekenen de beweging van de zon om hun thuis terug te vinden.
De ontwikkeling van een dergelijke robot kan helpen bij reddingsmissies en het automatisch bestuiven van gewassen.
Chips
"Omdat het brein van een honingbij een stuk kleiner en toegankelijker is dan dat van gewervelde dieren, hopen we dat we uiteindelijk een accuraat en compleet model kunnen maken en dit kunnen testen in een vliegende robot", aldus één van de onderzoekers tegenover de BBC.
Het kunstmatige brein draait op krachtige grafische chips die geleverd zullen worden door Nvidia. Uiteindelijk hopen de wetenschappers dat de vliegende robot beslissingen zal nemen op basis van wat het 'voelt' in plaats van op basis van voorgeprogrammeerde taken zoals nu bij robots het geval is.
Door: NU.nl/Colin van Hoek .
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
10-10-2012
Robot Polaris moet naar water boren op maan
© reuters.
Voormalige medewerkers van de Carnegie Mellon-universiteit werken met hun spin-off Astrobotic Technology Inc. aan een robotvoertuig dat op de maan naar water moet gaan zoeken. Een prototype is inmiddels klaar voor verdere ontwikkeling, meldt Tweakers.net.
De maanrobot Polaris van het ruimtetechnologiebedrijf moet op termijn naar de maan worden gestuurd om daar rond de polen op zoek gaan naar waterijs. Dat moet toekomstige maanmissies een stuk aantrekkelijker maken, aangezien van het water raketbrandstof gemaakt zou kunnen worden waarmee maanlanders terug naar de Aarde kunnen vliegen. Ook zou water voor een bemande basis welkom zijn als drinkwater en als zuurstofbron.
Prototype
Polaris verkeert nog in het prototypestadium, en werd ontwikkeld om op Aarde de hard- en vooral software te testen. Het prototype van ongeveer 1,7 meter hoog, 2,4 meter breed en 2,6 meter lang weegt 150 kilo. De robot moet zelfstandig navigeren en is daartoe uitgerust met visuele navigatiehulpmiddelen en software; de plaatsbepaling op de maan moet tot op enkele meters nauwkeurig worden. Om daadwerkelijk naar waterijs te zoeken is Polaris uitgerust met een boor om een meter diep te delven.
Lancering
De maanrobot moet op termijn met een Falcon 9-raket van SpaceX gelanceerd worden, en zou dan op de noordpool van de maan zijn werk moeten doen. Omdat de zon daar zeer laag staat, heeft Polaris drie zonnepanelen die verticaal gepositioneerd zijn. Daarmee zou 250W gegenereerd kunnen worden. Gedurende tien dagen van de veertien dagen durende maandagen zou Polaris tientallen gaten moeten boren.
(HLN)
Robot Polaris moet naar water boren op maan

© reuters.
Voormalige medewerkers van de Carnegie Mellon-universiteit werken met hun spin-off Astrobotic Technology Inc. aan een robotvoertuig dat op de maan naar water moet gaan zoeken. Een prototype is inmiddels klaar voor verdere ontwikkeling, meldt Tweakers.net.
De maanrobot Polaris van het ruimtetechnologiebedrijf moet op termijn naar de maan worden gestuurd om daar rond de polen op zoek gaan naar waterijs. Dat moet toekomstige maanmissies een stuk aantrekkelijker maken, aangezien van het water raketbrandstof gemaakt zou kunnen worden waarmee maanlanders terug naar de Aarde kunnen vliegen. Ook zou water voor een bemande basis welkom zijn als drinkwater en als zuurstofbron.
Prototype
Polaris verkeert nog in het prototypestadium, en werd ontwikkeld om op Aarde de hard- en vooral software te testen. Het prototype van ongeveer 1,7 meter hoog, 2,4 meter breed en 2,6 meter lang weegt 150 kilo. De robot moet zelfstandig navigeren en is daartoe uitgerust met visuele navigatiehulpmiddelen en software; de plaatsbepaling op de maan moet tot op enkele meters nauwkeurig worden. Om daadwerkelijk naar waterijs te zoeken is Polaris uitgerust met een boor om een meter diep te delven.
Lancering
De maanrobot moet op termijn met een Falcon 9-raket van SpaceX gelanceerd worden, en zou dan op de noordpool van de maan zijn werk moeten doen. Omdat de zon daar zeer laag staat, heeft Polaris drie zonnepanelen die verticaal gepositioneerd zijn. Daarmee zou 250W gegenereerd kunnen worden. Gedurende tien dagen van de veertien dagen durende maandagen zou Polaris tientallen gaten moeten boren.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Een geweldige foto serie van The Atlantic:
http://www.theatlantic.co(...)ork-and-play/100389/
Een paar van de foto's:
En dit vind ik ook mooi, hoe het steeds makkelijker wordt om zelf robots te bouwen aangezien soft-ware vaak opensource is en op internet beland, en onderdelen steeds goedkoper worden. Deze robot kan zelf banden oppompen.
http://www.theatlantic.co(...)ork-and-play/100389/
Een paar van de foto's:



En dit vind ik ook mooi, hoe het steeds makkelijker wordt om zelf robots te bouwen aangezien soft-ware vaak opensource is en op internet beland, en onderdelen steeds goedkoper worden. Deze robot kan zelf banden oppompen.

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

"An educated citizenry is a vital requisite for our survival as a free people."
Petman heeft een upgrade gekregen en kan nu ook springen en klimmen. Best ziek...

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Mooie tijden om in te leven. We maken echt het begin mee van een nieuw tijdperkquote:
Petman heeft een upgrade gekregen en kan nu ook springen en klimmen. Best ziek...
"An educated citizenry is a vital requisite for our survival as a free people."
01-11-2012
Zin in een salade? Deze robot maakt ‘m graag voor u!
Zin in een salade, maar geen zin om ‘m te maken? De robotica schiet te hulp! Zuid-Koreaanse wetenschappers presenteren een robot die prima in staat is om op eigen houtje een salade te bereiden. U moet alleen wel even geduld hebben…
Een salade maken: daar draait robot CIROS zijn hand niet voor om. De robot is speciaal ontwikkeld voor een plekje in het huishouden en kan naast salades maken ook uw drankjes bijvullen, objecten verplaatsen (opruimen), de tafel dekken en afruimen.
Om dat allemaal te bewerkstelligen, is de robot onder meer uitgerust met verschillende camera’s en sensoren. Ook kan hij obstakels vermijden en objecten en bepaalde woorden herkennen. De Zuid-Koreanen ontwikkelden de eerste versie van de robot in 2005, maar bleven er voortdurend aan sleutelen. Dit is alweer de derde versie van de robot.
En in een filmpje bewijst de robot nu wat ‘ie waard is. Te zien is hoe de robot een komkommer snijdt en de dressing aanbrengt. Uiteindelijk levert dat een mooie salade op. U moet wel even geduld hebben: heel snel is CIROS namelijk nog niet.
(scientias.nl)
Zin in een salade? Deze robot maakt ‘m graag voor u!

Zin in een salade, maar geen zin om ‘m te maken? De robotica schiet te hulp! Zuid-Koreaanse wetenschappers presenteren een robot die prima in staat is om op eigen houtje een salade te bereiden. U moet alleen wel even geduld hebben…
Een salade maken: daar draait robot CIROS zijn hand niet voor om. De robot is speciaal ontwikkeld voor een plekje in het huishouden en kan naast salades maken ook uw drankjes bijvullen, objecten verplaatsen (opruimen), de tafel dekken en afruimen.
Om dat allemaal te bewerkstelligen, is de robot onder meer uitgerust met verschillende camera’s en sensoren. Ook kan hij obstakels vermijden en objecten en bepaalde woorden herkennen. De Zuid-Koreanen ontwikkelden de eerste versie van de robot in 2005, maar bleven er voortdurend aan sleutelen. Dit is alweer de derde versie van de robot.
En in een filmpje bewijst de robot nu wat ‘ie waard is. Te zien is hoe de robot een komkommer snijdt en de dressing aanbrengt. Uiteindelijk levert dat een mooie salade op. U moet wel even geduld hebben: heel snel is CIROS namelijk nog niet.

(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
09-11-2012
Nederlandse robot leert zichzelf lopen
Wetenschappers van de TU Delft hebben een robot ontwikkeld die zichzelf kan leren lopen en zichzelf binnen een kwartiertje aanleerde om trappen te lopen.
Robots: ze zijn er al in allerlei vorm en maten en met allerlei functionaliteiten. Maar in het dagelijks leven willen ze maar niet echt doorbreken. Zo hebben we de door sommige visionairs voorspelde robots die ons helpen in het huishouden nog steeds niet. Eén van de redenen daarvan is dat robots moeite hebben om zich aan te passen. Een robot kan geprogrammeerd worden om bepaalde dingen te doen. Bijvoorbeeld naar de keuken lopen om een glas op te ruimen. Maar in een gezin valt zo’n simpele taak nog niet mee. De omgeving is weer heel anders dan het lab, er rennen kinderen rond, moeder schuift regelmatig met de meubels en vader laat zijn schoenen overal slingeren. Hoe kan een robot zich in zo’n veranderende omgeving overeind houden als hij niet in staat is om te leren?
Simulaties
Veel onderzoekers zijn er dan ook van overtuigd dat robots eerst in staat moeten zijn om zichzelf nieuwe dingen aan te leren en daarna pas een kans maken op een plekje in de maatschappij. Er wordt al veel geëxperimenteerd met dat idee, maar vaak gebruiken wetenschappers daarvoor simulaties. Onderzoeker Erik Schuitema tilt zijn onderzoek naar lerende robots direct naar een hoger plan door niet met simulaties, maar met een echte robot te werken. En daar heeft hij een goede reden voor, zo vertelt hij: “Er is nog weinig bekend over de aansluiting met echte, daadwerkelijke hardware.”
Leo
En dus ontwikkelde Schuitema samen met zijn collega’s robot Leo. “We hebben een tweevoetige, lopende robot, genaamd Leo, speciaal ontworpen en gebouwd om onderzoek te doen naar het toepassen van Reinforcement Learning (leren door middel van beloningen, red.) op echte robots. Robot Leo is in staat om twee motorische basistaken te leren: het plaatsen van een voet op een traptrede, en lopen.”
Beloning
Om de robot in staat te stellen zichzelf te leren lopen, maken de onderzoekers dus gebruik van Reinforcement Learning. Goed gedrag wordt beloond, slecht gedrag wordt bestraft. Maar hoe beloont u een robot? Met hoge cijfers. Als Leo zijn voet correct beweegt, krijgt hij een hoog cijfer. Doet hij het niet goed, dan krijgt hij een laag cijfer. De robot is zo geprogrammeerd dat deze voor hoge cijfers gaat. Als hij een laag cijfer scoort, gaat hij zijn acties bijsturen of iets anders proberen om toch maar een hoog cijfer te krijgen.
Leren lopen
De aanpak van de wetenschappers bleek effectief te zijn. Binnen een kwartiertje leerde Leo zichzelf om trap te lopen. Leren lopen kostte de robot wat meer tijd. Probleem was dat Leo duizenden keren viel en de hardware niet bestand was tegen al die klappen. Om te voorkomen dat Leo het zou begeven, hielpen de onderzoekers ‘m een klein beetje. Hij mocht de kunst afkijken van lopende robots die handmatig waren geprogrammeerd. Binnen een aantal uur kon Leo ze al nadoen en hun tred zelfs verbeteren.
Het kan wel
Hoewel Leo in de experimenten een beetje vals heeft gespeeld, kan hij zichzelf echt leren lopen, zolang de hardware maar bestand is tegen vallen, zo benadrukt Schuitema. Simulaties wijzen erop dat het de robot dan zo’n vijf uur zou kosten om het lopen onder de knie te krijgen.
Maakt dit de weg dan vrij voor robots in het dagelijks leven? Het is (letterlijk) een stap in de goede richting, maar we zijn er nog niet. “Het kan nog wel decennia duren voordat dit soort robots in de praktijk aan de slag kunnen.
(scientias.nl)
[ Bericht 0% gewijzigd door ExperimentalFrentalMental op 09-11-2012 10:14:32 ]
Nederlandse robot leert zichzelf lopen

Wetenschappers van de TU Delft hebben een robot ontwikkeld die zichzelf kan leren lopen en zichzelf binnen een kwartiertje aanleerde om trappen te lopen.
Robots: ze zijn er al in allerlei vorm en maten en met allerlei functionaliteiten. Maar in het dagelijks leven willen ze maar niet echt doorbreken. Zo hebben we de door sommige visionairs voorspelde robots die ons helpen in het huishouden nog steeds niet. Eén van de redenen daarvan is dat robots moeite hebben om zich aan te passen. Een robot kan geprogrammeerd worden om bepaalde dingen te doen. Bijvoorbeeld naar de keuken lopen om een glas op te ruimen. Maar in een gezin valt zo’n simpele taak nog niet mee. De omgeving is weer heel anders dan het lab, er rennen kinderen rond, moeder schuift regelmatig met de meubels en vader laat zijn schoenen overal slingeren. Hoe kan een robot zich in zo’n veranderende omgeving overeind houden als hij niet in staat is om te leren?
Simulaties
Veel onderzoekers zijn er dan ook van overtuigd dat robots eerst in staat moeten zijn om zichzelf nieuwe dingen aan te leren en daarna pas een kans maken op een plekje in de maatschappij. Er wordt al veel geëxperimenteerd met dat idee, maar vaak gebruiken wetenschappers daarvoor simulaties. Onderzoeker Erik Schuitema tilt zijn onderzoek naar lerende robots direct naar een hoger plan door niet met simulaties, maar met een echte robot te werken. En daar heeft hij een goede reden voor, zo vertelt hij: “Er is nog weinig bekend over de aansluiting met echte, daadwerkelijke hardware.”

Leo
En dus ontwikkelde Schuitema samen met zijn collega’s robot Leo. “We hebben een tweevoetige, lopende robot, genaamd Leo, speciaal ontworpen en gebouwd om onderzoek te doen naar het toepassen van Reinforcement Learning (leren door middel van beloningen, red.) op echte robots. Robot Leo is in staat om twee motorische basistaken te leren: het plaatsen van een voet op een traptrede, en lopen.”
Beloning
Om de robot in staat te stellen zichzelf te leren lopen, maken de onderzoekers dus gebruik van Reinforcement Learning. Goed gedrag wordt beloond, slecht gedrag wordt bestraft. Maar hoe beloont u een robot? Met hoge cijfers. Als Leo zijn voet correct beweegt, krijgt hij een hoog cijfer. Doet hij het niet goed, dan krijgt hij een laag cijfer. De robot is zo geprogrammeerd dat deze voor hoge cijfers gaat. Als hij een laag cijfer scoort, gaat hij zijn acties bijsturen of iets anders proberen om toch maar een hoog cijfer te krijgen.
Leren lopen
De aanpak van de wetenschappers bleek effectief te zijn. Binnen een kwartiertje leerde Leo zichzelf om trap te lopen. Leren lopen kostte de robot wat meer tijd. Probleem was dat Leo duizenden keren viel en de hardware niet bestand was tegen al die klappen. Om te voorkomen dat Leo het zou begeven, hielpen de onderzoekers ‘m een klein beetje. Hij mocht de kunst afkijken van lopende robots die handmatig waren geprogrammeerd. Binnen een aantal uur kon Leo ze al nadoen en hun tred zelfs verbeteren.

Het kan wel
Hoewel Leo in de experimenten een beetje vals heeft gespeeld, kan hij zichzelf echt leren lopen, zolang de hardware maar bestand is tegen vallen, zo benadrukt Schuitema. Simulaties wijzen erop dat het de robot dan zo’n vijf uur zou kosten om het lopen onder de knie te krijgen.
Maakt dit de weg dan vrij voor robots in het dagelijks leven? Het is (letterlijk) een stap in de goede richting, maar we zijn er nog niet. “Het kan nog wel decennia duren voordat dit soort robots in de praktijk aan de slag kunnen.
(scientias.nl)
[ Bericht 0% gewijzigd door ExperimentalFrentalMental op 09-11-2012 10:14:32 ]
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
13-11-2012
Robots zijn de toekomst in China
© ap.
De snelst groeiende markt voor robots bevindt zich in China, meldt Gudrun Litzenberger, secretaris-generaal van de Internationale Federatie voor Robots. Ze verwacht dat de vraag er tegen 2014 zal stijgen tot 32.000 eenheden en China daarmee wereldwijd de grootste gebruiker van robots wordt.
Dat de programmeerbare machines populair zijn in China en voor vele doeleinden kunnen worden ingezet, was vorige week duidelijk op de International Industry Fair in Shanghai. Robots die letterlijk de degens kruisten, pingpong speelden of zich aan een dansje waagden, was geen ongewoon zicht op de internationale beurs.
Waarom robots?
Industriële robots zijn energie-efficient en kunnen complexe taken uitvoeren waarvoor zelfs de best getrainde werknemers zich in de haren krabben. Maar een gewijzigde demografie en economische factoren blijven de belangrijkste redenen voor China's stijgende vraag naar robots. Moraal van het verhaal: de beroepsbevolking krimpt waardoor de arbeidskosten toenemen.
"Chinese fabrieken hebben het steeds moeilijker om getraind personeel te vinden. Het is dan ook begrijpelijk dat zij inzetten op de automatisering van de productie," meldt Geoff Crothall, woordvoerder van China Labor Bulletin, een ngo die Chinese arbeidsrechten promoot en verdedigt.
Op zoek naar beter betaalde job
De eenkindpolitiek en verbeterde gezondheidszorg zijn eveneens van invloed op de Chinese werkvloer. De jongere generatie moet meer verdienen om hun langer levende ouders te kunnen onderhouden, waardoor zij ervoor kiezen om langer school te lopen en zo hun kansen op een beter betaalde job te verhogen.
Robots kunnen de werkplekken invullen die jongeren de rug toekeren, bericht de Britse nieuwssite The Guardian.
(Lees hieronder verder)
Het bedrijf Foxconn, dat onder meer de Mac Mini en de iPhone produceert, heeft momenteel 10.000 robots in gebruik en wil dat aantal de komende drie jaar uitbreiden tot een miljoen stuks. Lassen, spuiten en assembleren zullen volgens CEO Terry Gou tot hun takenpakket behoren.
Modernisering noodzakelijk
Chinese autoriteiten bejubelen intussen de groei van de sector. "Robotica is een van onze belangrijkste industrieën", liet de lokale overheid van Shanghai eerder verstaan in de Chinese krant China Daily. Volgens Yang Zhiming, viceminister van het Ministry of Human Resources and Social Security, moet blijven worden ingezet op de modernisering van de apparatuur en technologie.
Robots duiken niet alleen op in Chinese fabrieken. In 2009 verwierf de Chinese landbouwer Wu Yulu bekendheid omdat hij robots gebruikte om riksja's voort te trekken en sigaretten van bezoekers aan te steken. In de kustprovincie Shangdong opende twee jaar geleden een restaurant met entertainende robots in heuse 'Star Wars'-stijl en afgelopen maart lanceerde een andere restauranthouder robots om noedels te snijden.
Meer robots in de toekomst
"Jonge mensen zijn minder bereid om vuil en vermoeiend werk uit te voeren. We maken gewoon gebruik van de voorhanden technologie", aldus restaurantuitbater Cui Runguan. Hij verwacht bovendien dat "veel meer machines" menselijke arbeid zullen vervangen in de toekomst.
(HLN)
Robots zijn de toekomst in China

© ap.
De snelst groeiende markt voor robots bevindt zich in China, meldt Gudrun Litzenberger, secretaris-generaal van de Internationale Federatie voor Robots. Ze verwacht dat de vraag er tegen 2014 zal stijgen tot 32.000 eenheden en China daarmee wereldwijd de grootste gebruiker van robots wordt.
Dat de programmeerbare machines populair zijn in China en voor vele doeleinden kunnen worden ingezet, was vorige week duidelijk op de International Industry Fair in Shanghai. Robots die letterlijk de degens kruisten, pingpong speelden of zich aan een dansje waagden, was geen ongewoon zicht op de internationale beurs.
Waarom robots?
Industriële robots zijn energie-efficient en kunnen complexe taken uitvoeren waarvoor zelfs de best getrainde werknemers zich in de haren krabben. Maar een gewijzigde demografie en economische factoren blijven de belangrijkste redenen voor China's stijgende vraag naar robots. Moraal van het verhaal: de beroepsbevolking krimpt waardoor de arbeidskosten toenemen.
"Chinese fabrieken hebben het steeds moeilijker om getraind personeel te vinden. Het is dan ook begrijpelijk dat zij inzetten op de automatisering van de productie," meldt Geoff Crothall, woordvoerder van China Labor Bulletin, een ngo die Chinese arbeidsrechten promoot en verdedigt.
Op zoek naar beter betaalde job
De eenkindpolitiek en verbeterde gezondheidszorg zijn eveneens van invloed op de Chinese werkvloer. De jongere generatie moet meer verdienen om hun langer levende ouders te kunnen onderhouden, waardoor zij ervoor kiezen om langer school te lopen en zo hun kansen op een beter betaalde job te verhogen.
Robots kunnen de werkplekken invullen die jongeren de rug toekeren, bericht de Britse nieuwssite The Guardian.
(Lees hieronder verder)

Het bedrijf Foxconn, dat onder meer de Mac Mini en de iPhone produceert, heeft momenteel 10.000 robots in gebruik en wil dat aantal de komende drie jaar uitbreiden tot een miljoen stuks. Lassen, spuiten en assembleren zullen volgens CEO Terry Gou tot hun takenpakket behoren.
Modernisering noodzakelijk
Chinese autoriteiten bejubelen intussen de groei van de sector. "Robotica is een van onze belangrijkste industrieën", liet de lokale overheid van Shanghai eerder verstaan in de Chinese krant China Daily. Volgens Yang Zhiming, viceminister van het Ministry of Human Resources and Social Security, moet blijven worden ingezet op de modernisering van de apparatuur en technologie.
Robots duiken niet alleen op in Chinese fabrieken. In 2009 verwierf de Chinese landbouwer Wu Yulu bekendheid omdat hij robots gebruikte om riksja's voort te trekken en sigaretten van bezoekers aan te steken. In de kustprovincie Shangdong opende twee jaar geleden een restaurant met entertainende robots in heuse 'Star Wars'-stijl en afgelopen maart lanceerde een andere restauranthouder robots om noedels te snijden.
Meer robots in de toekomst
"Jonge mensen zijn minder bereid om vuil en vermoeiend werk uit te voeren. We maken gewoon gebruik van de voorhanden technologie", aldus restaurantuitbater Cui Runguan. Hij verwacht bovendien dat "veel meer machines" menselijke arbeid zullen vervangen in de toekomst.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Erg interessant. Ik ben benieuwd of en wanneer ze Japan gaan overtreffen in research hierin.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Nice! De manier waarop je een robot kunt programmeren wordt hier ontzettend simpel gemaakt 
Enabling End-Users to Program New Robot Skills
Mobile manipulators like the PR2 have the physical capability to do a range of useful tasks for humans, however their actual capabilities are limited by the software applications written by highly specialized programmers. Instead, Maya Cakmak from Georgia Tech, envisions robots that can be programmed by their end-users for their own specific needs. This past summer, Maya worked on developing a spoken dialog interface that allows a user to program new skills by physically moving PR2’s two arms and using simple speech commands.
Imagine purchasing a brand new “programmable” robot. How would you know what to do, to make the robot do something? This is not a problem for many of our daily appliances as they considerably limit possible user actions. For functionality like robot programming with a verbal dialog interface, however, it is important to guide the user with appropriate feedback from the robot and provide supplementary materials such as user manuals, tutorials, or instructional videos. Maya conducted a user study that replicates the described scenario. Participants in this study (15 men and 15 women, ages 19-70) with no prior knowledge of how to program the robot were left alone with the robot and a combination of supplementary materials. They had to figure out on their own how to program different skills such as picking up medicine from a cabinet or folding a towel.
The study revealed that information presented in the user manual easily gets overlooked and instructional videos are most useful in jump starting the interaction. In addition, trial-and-error plays a crucial role especially for achieving a certain proficiency level.
User studies like Maya’s, provide important insights into how the interface and the supplementary material should be designed to improve the learnability of end-user programmable robots. Check out the video for sample interactions and look for Maya and Leila Takayama’s upcoming publication for more details.
http://www.zeitnews.org/a(...)ram-new-robot-skills
Enabling End-Users to Program New Robot Skills

Mobile manipulators like the PR2 have the physical capability to do a range of useful tasks for humans, however their actual capabilities are limited by the software applications written by highly specialized programmers. Instead, Maya Cakmak from Georgia Tech, envisions robots that can be programmed by their end-users for their own specific needs. This past summer, Maya worked on developing a spoken dialog interface that allows a user to program new skills by physically moving PR2’s two arms and using simple speech commands.
Imagine purchasing a brand new “programmable” robot. How would you know what to do, to make the robot do something? This is not a problem for many of our daily appliances as they considerably limit possible user actions. For functionality like robot programming with a verbal dialog interface, however, it is important to guide the user with appropriate feedback from the robot and provide supplementary materials such as user manuals, tutorials, or instructional videos. Maya conducted a user study that replicates the described scenario. Participants in this study (15 men and 15 women, ages 19-70) with no prior knowledge of how to program the robot were left alone with the robot and a combination of supplementary materials. They had to figure out on their own how to program different skills such as picking up medicine from a cabinet or folding a towel.
The study revealed that information presented in the user manual easily gets overlooked and instructional videos are most useful in jump starting the interaction. In addition, trial-and-error plays a crucial role especially for achieving a certain proficiency level.
User studies like Maya’s, provide important insights into how the interface and the supplementary material should be designed to improve the learnability of end-user programmable robots. Check out the video for sample interactions and look for Maya and Leila Takayama’s upcoming publication for more details.
http://www.zeitnews.org/a(...)ram-new-robot-skills
"An educated citizenry is a vital requisite for our survival as a free people."
Die techniek bestaat al jaren. Het punt is alleen dat je hem 1 specifiek kunstje kan leren. Je kan hem bijvoorbeeld leren om een trui op te vouwen, maar het vouwen van een t-shirt, hemd of broek kan hij dan niet.Voor zover ik weet zijn we met AI nog niet zo ver dat een robot dergelijke taken kan generaliseren.
Nieuwe DARPA challenge
Bedrijven die mee doen moeten een robot bouwen die:
Eind 2014 willen ze de eerste robots zien. Behoorlijk optimistisch als je het mij vraagt. Maar we zullen zien
Bedrijven die mee doen moeten een robot bouwen die:
http://singularityhub.com(...)-robotics-challenge/quote:What DARPA wants to see is a robot that has human-like “mobility and manipulation” abilities. At a disaster scene robots will have to make use of the same machinery and tools that human rescue teams have to use. The different stages of the challenge are meant to simulate an emergency response to a natural or manmade disaster. The robot will enter an open-frame vehicle like a John Deere Gator or Polaris Ranger, turn it on, and drive it – steering, throttle, brakes and all – to the disaster scene. Once it’s pulled up to the pile of rubble, it will exit the vehicle and climb over the sloped terrain littered with loose rocks, trees, ditches, and other obstacles it has to negotiate or avoid. Eventually the robot will reach an entryway blocked with debris that it will have to remove. Once the debris is cleared, it has to operate a door handle and push the door open. Inside, it will have to climb a ladder to reach a catwalk. After crossing the catwalk it will reach a concrete panel or a framed wall that it has to bust through using something like an electric hammer or chisel. Waiting for it on the other side of the panel will be a series of pipes, only one of which will be leaking. The robot has to spot the smoke or hear the hissing sound to locate the faulty pipe and then close the pipe’s turn valve. Lastly, the rescue robot’s day will end after locating and replacing a cooling pump.
Eind 2014 willen ze de eerste robots zien. Behoorlijk optimistisch als je het mij vraagt. Maar we zullen zien
Het gaat er natuurlijk ook om dat ze steeds precieser die ene taak kunnen uitvoeren. Voor bedrijven als FOXCONN zijn juist dit soort robots enorm handig.quote:
Die techniek bestaat al jaren. Het punt is alleen dat je hem 1 specifiek kunstje kan leren. Je kan hem bijvoorbeeld leren om een trui op te vouwen, maar het vouwen van een t-shirt, hemd of broek kan hij dan niet.Voor zover ik weet zijn we met AI nog niet zo ver dat een robot dergelijke taken kan generaliseren.
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Robots bij Foxconn (en elke andere automatiseerde fabriek) worden volledig voorgeprogrammeerd. Die teach-in methode is alleen handig als je een robot snel meerdere simpele taken wil leren. In een fabriek moet een robot jarenlang precies dezelfde, vaak complexe, taak doen. Met oog op nauwkeurigheid en cyclustijd doe je dat dan niet met teach-in.
20-11-2012
Verban 'moordrobots' al voor hun komst
Ook drones vereisen nauwelijks menselijk handelen © ap.
Robots die gemaakt zijn om te moorden zonder tussenkomst van menselijk handelen. Ze bestaan nog niet, maar Human Rights Watch en de rechtenfaculteit van de Amerikaanse universiteit Harvard riepen al op tot een internationaal verbod op zulke machines.
Dat staat te lezen in een rapport dat beide organisaties uitbrachten. "We roepen op tot een internationaal verdrag dat het absoluut verbiedt zogeheten moordrobots te ontwikkelen, produceren en als volledig op zichzelf werkende wapens te gebruiken."
Wapens waarbij nauwelijks menselijk handelen vereist is, bestaan al. Drones, onbemande vliegtuigen die boven onder andere Pakistan en Afghanistan surveilleren, zijn daarvan een voorbeeld.
(HLN)
Verban 'moordrobots' al voor hun komst

Ook drones vereisen nauwelijks menselijk handelen © ap.
Robots die gemaakt zijn om te moorden zonder tussenkomst van menselijk handelen. Ze bestaan nog niet, maar Human Rights Watch en de rechtenfaculteit van de Amerikaanse universiteit Harvard riepen al op tot een internationaal verbod op zulke machines.
Dat staat te lezen in een rapport dat beide organisaties uitbrachten. "We roepen op tot een internationaal verdrag dat het absoluut verbiedt zogeheten moordrobots te ontwikkelen, produceren en als volledig op zichzelf werkende wapens te gebruiken."
Wapens waarbij nauwelijks menselijk handelen vereist is, bestaan al. Drones, onbemande vliegtuigen die boven onder andere Pakistan en Afghanistan surveilleren, zijn daarvan een voorbeeld.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Hier laten ze in 10 minuten zien wat Asimo allemaal kan. Blijkbaar kan hij tegenwoordig al hinkelen!
Bij 07:08 zie je hem hinkelen

Bij 07:08 zie je hem hinkelen
"An educated citizenry is a vital requisite for our survival as a free people."
23-11-2012
Bijzondere robotjes lopen helemaal op eigen kracht
Onderzoekers van de universiteit van Illinois hebben ‘bio-bots’ ontwikkeld: kleine, zachte robotjes die aan één zijde bekleed zijn met de hartcellen van ratten en zo in staat zijn om helemaal zelfstandig te wandelen.
De robotjes zijn gemaakt van hydrogel en heel flexibel. De robotjes zijn eigenlijk in twee stukken te verdelen. Een lang achterstuk, en een kort voorstuk. Het achterstuk is bekleed met de hartcellen van ratten. Wanneer deze hartcellen slaan, komt het achterstuk in beweging en duwt het voorstuk als het ware voort.
3D-printer
Om de zeven millimeter lange robots te ontwikkelen, maakten de onderzoekers gebruik van hydrogel, hartcellen en een 3D-printer. Bij de ontwikkeling van de robots lieten ze zich inspireren door de natuur. “Wij ingenieurs bouwen dingen altijd van harde materialen, materialen die zich voorspelbaar gedragen,” vertelt onderzoeker Rashid Bashir. “Toch zijn er veel toepassingen waarbij de natuur een probleem op een andere, elegante manier oplost. Door te ontwerpen met behulp van biologische structuren, kunnen we de kracht van cellen en de natuur gebruiken om uitdagingen waar de maatschappij vandaag de dag mee te maken heeft, aangaan.”
Mogelijkheden
De onderzoekers zien genoeg mogelijkheden voor hun bio-bots. Zo zouden ze ingezet kunnen worden als sensoren. Door de bio-bots te bekleden met cellen die op bepaalde prikkels (bijvoorbeeld een chemische stof) reageren, kan door alleen maar naar de biobot te kijken, worden vastgesteld of zo’n prikkel zich in de directe omgeving bevindt. “Je kunt dan denken aan een sensor die zichzelf voortbeweegt, voortdurend monsters verzamelt en zich nuttig maakt in de medische wereld of zich inzet voor het milieu. Er zijn heel veel mogelijkheden, afhankelijk van de type cellen die we gebruiken.”
De onderzoekers blijven aan de robots knutselen. Zo werken ze aan robots met verschillende vormen, meer benen en robots die hellingen of trappen kunnen beklimmen.
(scientias.nl)
Bijzondere robotjes lopen helemaal op eigen kracht

Onderzoekers van de universiteit van Illinois hebben ‘bio-bots’ ontwikkeld: kleine, zachte robotjes die aan één zijde bekleed zijn met de hartcellen van ratten en zo in staat zijn om helemaal zelfstandig te wandelen.
De robotjes zijn gemaakt van hydrogel en heel flexibel. De robotjes zijn eigenlijk in twee stukken te verdelen. Een lang achterstuk, en een kort voorstuk. Het achterstuk is bekleed met de hartcellen van ratten. Wanneer deze hartcellen slaan, komt het achterstuk in beweging en duwt het voorstuk als het ware voort.
3D-printer
Om de zeven millimeter lange robots te ontwikkelen, maakten de onderzoekers gebruik van hydrogel, hartcellen en een 3D-printer. Bij de ontwikkeling van de robots lieten ze zich inspireren door de natuur. “Wij ingenieurs bouwen dingen altijd van harde materialen, materialen die zich voorspelbaar gedragen,” vertelt onderzoeker Rashid Bashir. “Toch zijn er veel toepassingen waarbij de natuur een probleem op een andere, elegante manier oplost. Door te ontwerpen met behulp van biologische structuren, kunnen we de kracht van cellen en de natuur gebruiken om uitdagingen waar de maatschappij vandaag de dag mee te maken heeft, aangaan.”
Mogelijkheden
De onderzoekers zien genoeg mogelijkheden voor hun bio-bots. Zo zouden ze ingezet kunnen worden als sensoren. Door de bio-bots te bekleden met cellen die op bepaalde prikkels (bijvoorbeeld een chemische stof) reageren, kan door alleen maar naar de biobot te kijken, worden vastgesteld of zo’n prikkel zich in de directe omgeving bevindt. “Je kunt dan denken aan een sensor die zichzelf voortbeweegt, voortdurend monsters verzamelt en zich nuttig maakt in de medische wereld of zich inzet voor het milieu. Er zijn heel veel mogelijkheden, afhankelijk van de type cellen die we gebruiken.”
De onderzoekers blijven aan de robots knutselen. Zo werken ze aan robots met verschillende vormen, meer benen en robots die hellingen of trappen kunnen beklimmen.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
27-11-2012
Wetenschappers gaan vast nadenken over ‘bestaansbedreigende technologie’
De universiteit van Cambridge gaat een nieuw centrum beginnen, waar wetenschappers, filosofen en computertechnici kunnen discussiëren over de voor- en nadelen van kunstmatige intelligentie, en daarmee zelfs het voortbestaan van de mens.
Het centrum is een serieuze poging om wetenschappers beter inzicht te geven in de voors en tegens van AI, ‘Artificial Intelligence’. Want, zo redeneren de onderzoekers, dat zou mogelijk een gevaar kunnen gaan vormen voor de wereld.
Bestaansbedreigende technologiën
Het centrum wordt opgericht door een filosoof, een onderzoeker, en een computerwetenschapper. In het ‘Center for the Study of Existential Risk’ (CSER), kan over alles worden gediscussieerd wat met de toekomst van technologie te maken heeft, maar vooral over “technologieën die ons bestaan kunnen bedreigen.” Dat kan gaan over bio- en nanotechnologie, maar ook over klimaatverandering of over kunstmatige intelligentie.
Nieuwe evolutie
“Kunstmatige intelligentie gaat straks ons leven beheersen,” zegt oprichter en filosoof Huw Price. “We zullen op een moment komen, in deze eeuw of misschien de volgende, dat de volgende grote stap voor de mensheid eraan gaat komen – misschien wel de grootste in onze hele kosmische historie.” Price doelt daarmee op het “verplaatsen van intelligentie buiten de grenzen van de biologie.”
Superintelligent
Price borduurt voort op een paper dat in 1965 door Irving Good werd geschreven. Good speculeerde toen al over een ‘ultra-intelligente machine’, die slimmer dan een mens zou zijn. Price: “De natuur verwachtte ons als mens niet, en toch zijn we er. Nu moeten wij niet dezelfde fout maken door AGI (Artificial General Intelligence) te onderschatten. We moeten accepteren dat we straks misschien wel een doos van Pandora gaan openen waar we niet meer van terug kunnen keren, en waarmee het voortbestaan van de mensheid wordt bedreigd.”
Ethiek bij AI
Price werd voor zijn idee geïnspireerd door gesprekken met Jaan Tallinn, mede-oprichter van Skype. Tallinn geldt als een expert op het gebied van ethiek bij AI. Price: “Ik begon na te denken over de mogelijke implicaties van AI toen Tallinn zijn zorgen erover uitsprak. Als iemand die er zo serieus over denkt, er zo bang voor is, dan weet je dat je met een serieus dilemma te maken hebt.”
Speculaties
Price en Tallinn noemen enkele voorbeelden van mogelijke gevaren van ultra-artificiële intelligentie. “Robots die mogelijk onze middelen nodig hebben, of sterker worden dan wij…” Price geeft gelijk toe dat het gaat om speculaties en er niks zeker is. “Maar juist omdát we het niet weten, moeten we er wel over na gaan denken.”
“We zijn, als mensheid, op een punt gekomen waarop we eindelijk kunnen erkennen dat onze technologie zo ver is dat deze ons bestaan zou kunnen bedreigen,” zegt Price. Hij verwacht wel dat het centrum een succes wordt, want steeds meer wetenschappers hebben volgens hem aangegeven dat het een goed idee is dat er over dergelijke zaken moet worden nagedacht. “We zouden in ieder geval een klein beetje van onze middelen in moeten zetten om over deze onzekere toekomst na te denken.”
(scientias.nl)
Wetenschappers gaan vast nadenken over ‘bestaansbedreigende technologie’

De universiteit van Cambridge gaat een nieuw centrum beginnen, waar wetenschappers, filosofen en computertechnici kunnen discussiëren over de voor- en nadelen van kunstmatige intelligentie, en daarmee zelfs het voortbestaan van de mens.
Het centrum is een serieuze poging om wetenschappers beter inzicht te geven in de voors en tegens van AI, ‘Artificial Intelligence’. Want, zo redeneren de onderzoekers, dat zou mogelijk een gevaar kunnen gaan vormen voor de wereld.
Bestaansbedreigende technologiën
Het centrum wordt opgericht door een filosoof, een onderzoeker, en een computerwetenschapper. In het ‘Center for the Study of Existential Risk’ (CSER), kan over alles worden gediscussieerd wat met de toekomst van technologie te maken heeft, maar vooral over “technologieën die ons bestaan kunnen bedreigen.” Dat kan gaan over bio- en nanotechnologie, maar ook over klimaatverandering of over kunstmatige intelligentie.
Nieuwe evolutie
“Kunstmatige intelligentie gaat straks ons leven beheersen,” zegt oprichter en filosoof Huw Price. “We zullen op een moment komen, in deze eeuw of misschien de volgende, dat de volgende grote stap voor de mensheid eraan gaat komen – misschien wel de grootste in onze hele kosmische historie.” Price doelt daarmee op het “verplaatsen van intelligentie buiten de grenzen van de biologie.”
Superintelligent
Price borduurt voort op een paper dat in 1965 door Irving Good werd geschreven. Good speculeerde toen al over een ‘ultra-intelligente machine’, die slimmer dan een mens zou zijn. Price: “De natuur verwachtte ons als mens niet, en toch zijn we er. Nu moeten wij niet dezelfde fout maken door AGI (Artificial General Intelligence) te onderschatten. We moeten accepteren dat we straks misschien wel een doos van Pandora gaan openen waar we niet meer van terug kunnen keren, en waarmee het voortbestaan van de mensheid wordt bedreigd.”
Ethiek bij AI
Price werd voor zijn idee geïnspireerd door gesprekken met Jaan Tallinn, mede-oprichter van Skype. Tallinn geldt als een expert op het gebied van ethiek bij AI. Price: “Ik begon na te denken over de mogelijke implicaties van AI toen Tallinn zijn zorgen erover uitsprak. Als iemand die er zo serieus over denkt, er zo bang voor is, dan weet je dat je met een serieus dilemma te maken hebt.”
Speculaties
Price en Tallinn noemen enkele voorbeelden van mogelijke gevaren van ultra-artificiële intelligentie. “Robots die mogelijk onze middelen nodig hebben, of sterker worden dan wij…” Price geeft gelijk toe dat het gaat om speculaties en er niks zeker is. “Maar juist omdát we het niet weten, moeten we er wel over na gaan denken.”
“We zijn, als mensheid, op een punt gekomen waarop we eindelijk kunnen erkennen dat onze technologie zo ver is dat deze ons bestaan zou kunnen bedreigen,” zegt Price. Hij verwacht wel dat het centrum een succes wordt, want steeds meer wetenschappers hebben volgens hem aangegeven dat het een goed idee is dat er over dergelijke zaken moet worden nagedacht. “We zouden in ieder geval een klein beetje van onze middelen in moeten zetten om over deze onzekere toekomst na te denken.”
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Op de site zelf zie je een video verslag.
Robot developer attempts to speed up A.I. tech
(CBS News) Almost no one likes doing household chores, but most people don't have a choice -- they have to do them. However, a new robot generation may be about to change that. And that high-tech breakthrough could also change us.
Pictures: Robot tech goes into overdrive
The PR2 robot can shoot pool, bake cookies from scratch, and maybe, most importantly, can fetch and open a beer. It's the most advanced personal robot in a galaxy that isn't quite so far, far away.
Steve Cousins, chief executive officer of Willow Garage, a tech development company in California's Silicon Valley, said, "This robot can do things that people can do."
The real-world robot is the creation of Cousins' Silicon Valley company that is working to spawn a new industry in personal robots.
Cousins said, "Think about Rosie from 'The Jetsons,' but maybe without the attitude."
But is that realistic? Cousins said, "Rosie's a cartoon, right? But the idea that you can have a robotic device that can move around in a human space and do things for us is real. That's actually happening."
While fantasies of robotic maids may still be a dream, the field of robotics is progressing rapidly and the PR2 is at the center of that progress. "We created this open source software platform that is what Windows is to the PC," Cousins explained. "Everybody's sharing software and we can make progress to this future where we see robots."
Until Willow Garage created the PR2, each robotics researcher had to build their own robot from scratch before they could even begin experimenting. Pieter Abbeel, professor of Electrical Engineering and Computer Sciences at the University of California, Berkeley, said, "You spent so much time building and maintaining that contraption that your research would be really slowed down."
Abbeel got one of 11 PR2s that Willow Garage gave to university researchers who agreed to share their work to speed the evolution of artificial intelligence.
Abbeel decided to teach his robot to fold laundry -- not as mundane a task as you might think. Abbeel explained, "The big challenge in robotics right now is how to make robots deal with variability. Whenever things change around the robot, it needs to understand what it is that has changed and how to act on it. Any time you present a pile of laundry, it's going to be different. You're manipulating this towels, T-shirts, and so forth. The more variability, the harder the task is going to be."
To be of practical use in the home, robots need to figure out a changing world around them. To do that, the PR2 is loaded with sensors that reveal its surroundings in 3D. It knows when someone is in a room with it and sees the person in detail. But while seeing is one step, understanding is another.
At the forefront of robotic help will be aid for senior citizens. Abbeel said, "If we can program a way for machines to learn, then they could have a lot more intellectual capabilities after a while."
Researchers don't have to program everything the machine does -- they have to teach the machine to think by itself. Abbeel said, "We want to allow the machine to watch people do things and learn from that. It just kind of fumbles around with things and after a while realizes, 'Oh, this is how this works.' "
Since its inception, the robot has been imagined as both a helpful friend and a force that learned too much and became dangerous to its human inventors.
Asked if we have to worry about robots taking over the world some time, Cousins said, "It has no intention of taking over the world. Unless somebody programs the robot and says, you know, 'What you're supposed to do is kill all humans.' "
Asked about people with evil intentions, Cousins said, "But even if they did, at the end of that, so the robots killed all humans. (The robot) doesn't have anything to do next, right? It doesn't have like, 'Oh, now what I should do? Well, I should, you know, procreate or something, right?' They don't do that."
While those tired of folding laundry may be tempted to buy a PR2, the $400,000 price tag is a bit steep. Still, with robotics advancing quickly, a future free of household chores may, one day, be priceless.
Watch John Blackstone's full report in the video above.
http://www.cbsnews.com/83(...)o-speed-up-a.i-tech/
Robot developer attempts to speed up A.I. tech
(CBS News) Almost no one likes doing household chores, but most people don't have a choice -- they have to do them. However, a new robot generation may be about to change that. And that high-tech breakthrough could also change us.
Pictures: Robot tech goes into overdrive
The PR2 robot can shoot pool, bake cookies from scratch, and maybe, most importantly, can fetch and open a beer. It's the most advanced personal robot in a galaxy that isn't quite so far, far away.
Steve Cousins, chief executive officer of Willow Garage, a tech development company in California's Silicon Valley, said, "This robot can do things that people can do."
The real-world robot is the creation of Cousins' Silicon Valley company that is working to spawn a new industry in personal robots.
Cousins said, "Think about Rosie from 'The Jetsons,' but maybe without the attitude."
But is that realistic? Cousins said, "Rosie's a cartoon, right? But the idea that you can have a robotic device that can move around in a human space and do things for us is real. That's actually happening."
While fantasies of robotic maids may still be a dream, the field of robotics is progressing rapidly and the PR2 is at the center of that progress. "We created this open source software platform that is what Windows is to the PC," Cousins explained. "Everybody's sharing software and we can make progress to this future where we see robots."
Until Willow Garage created the PR2, each robotics researcher had to build their own robot from scratch before they could even begin experimenting. Pieter Abbeel, professor of Electrical Engineering and Computer Sciences at the University of California, Berkeley, said, "You spent so much time building and maintaining that contraption that your research would be really slowed down."
Abbeel got one of 11 PR2s that Willow Garage gave to university researchers who agreed to share their work to speed the evolution of artificial intelligence.
Abbeel decided to teach his robot to fold laundry -- not as mundane a task as you might think. Abbeel explained, "The big challenge in robotics right now is how to make robots deal with variability. Whenever things change around the robot, it needs to understand what it is that has changed and how to act on it. Any time you present a pile of laundry, it's going to be different. You're manipulating this towels, T-shirts, and so forth. The more variability, the harder the task is going to be."
To be of practical use in the home, robots need to figure out a changing world around them. To do that, the PR2 is loaded with sensors that reveal its surroundings in 3D. It knows when someone is in a room with it and sees the person in detail. But while seeing is one step, understanding is another.
At the forefront of robotic help will be aid for senior citizens. Abbeel said, "If we can program a way for machines to learn, then they could have a lot more intellectual capabilities after a while."
Researchers don't have to program everything the machine does -- they have to teach the machine to think by itself. Abbeel said, "We want to allow the machine to watch people do things and learn from that. It just kind of fumbles around with things and after a while realizes, 'Oh, this is how this works.' "
Since its inception, the robot has been imagined as both a helpful friend and a force that learned too much and became dangerous to its human inventors.
Asked if we have to worry about robots taking over the world some time, Cousins said, "It has no intention of taking over the world. Unless somebody programs the robot and says, you know, 'What you're supposed to do is kill all humans.' "
Asked about people with evil intentions, Cousins said, "But even if they did, at the end of that, so the robots killed all humans. (The robot) doesn't have anything to do next, right? It doesn't have like, 'Oh, now what I should do? Well, I should, you know, procreate or something, right?' They don't do that."
While those tired of folding laundry may be tempted to buy a PR2, the $400,000 price tag is a bit steep. Still, with robotics advancing quickly, a future free of household chores may, one day, be priceless.
Watch John Blackstone's full report in the video above.
http://www.cbsnews.com/83(...)o-speed-up-a.i-tech/
"An educated citizenry is a vital requisite for our survival as a free people."
02-11-2012
Wetenschappers maken concept voor 'transformer'-robot
Onderzoekers hebben een robot ontwikkeld die zich in potentie in alle mogelijke vormen kan vouwen. Het prototype is gebaseerd op de werking van eiwitten, die zich in het lichaam ook op allerlei wijzes kunnen vouwen. De 'transformer'-robot werkt met magneten.
De zogenaamde milli-motein is ontwikkeld door het Amerikaanse MIT en is ongeveer een centimeter groot. Door een ketting van soortgelijke componenten te maken, ziet de robot er relatief simpel uit, maar de milli-motein zou in staat zijn om alle kanten op te 'vouwen' en daardoor alle mogelijke vormen aan te nemen. De MIT-wetenschappers zorgen voor de vouwen met een speciaal type motor, dat door hen een elektropermanent-type wordt genoemd.
Volgens de onderzoekers werkt de motor op vergelijkbare wijze als magneten die worden gebruikt door een autosloper: dergelijke systemen bestaan uit één sterke magneet en een zwakkere. De richting van het magnetisch veld van de zwakkere magneet kan daarbij veranderd worden, waardoor het magnetisme van de sterkere magneet of versterkt of verzwakt wordt. De wetenschappers gebruikten een vergelijkbaar systeem in ringvorm die elk onderdeel van de robotketting kan vervormen. Zo is er alleen energie nodig om de robot van toestand te laten veranderen, maar niet om deze in een bepaalde vorm te houden.
De wetenschappers gaan er vanuit dat een keten van dergelijke ringen alle vormen kan aannemen, zolang deze maar lang genoeg is. Dit concept is afgekeken van hoe eiwitten in het lichaam worden gevormd; deze bestaan bij de fabricage ook uit lange ketens die vervolgens in een specifieke 3d-structuur worden gevouwen. Er bestaan miljoenen verschillende soorten eiwitten die allemaal hun eigen vorm hebben.
Voorlopig hebben de wetenschappers slechts op millimeterschaal dergelijke vouwbare robots ontwikkeld. Er wordt echter gewerkt aan varianten die zo groot zijn als mensen
(tweakers.net)
Wetenschappers maken concept voor 'transformer'-robot
Onderzoekers hebben een robot ontwikkeld die zich in potentie in alle mogelijke vormen kan vouwen. Het prototype is gebaseerd op de werking van eiwitten, die zich in het lichaam ook op allerlei wijzes kunnen vouwen. De 'transformer'-robot werkt met magneten.
De zogenaamde milli-motein is ontwikkeld door het Amerikaanse MIT en is ongeveer een centimeter groot. Door een ketting van soortgelijke componenten te maken, ziet de robot er relatief simpel uit, maar de milli-motein zou in staat zijn om alle kanten op te 'vouwen' en daardoor alle mogelijke vormen aan te nemen. De MIT-wetenschappers zorgen voor de vouwen met een speciaal type motor, dat door hen een elektropermanent-type wordt genoemd.
Volgens de onderzoekers werkt de motor op vergelijkbare wijze als magneten die worden gebruikt door een autosloper: dergelijke systemen bestaan uit één sterke magneet en een zwakkere. De richting van het magnetisch veld van de zwakkere magneet kan daarbij veranderd worden, waardoor het magnetisme van de sterkere magneet of versterkt of verzwakt wordt. De wetenschappers gebruikten een vergelijkbaar systeem in ringvorm die elk onderdeel van de robotketting kan vervormen. Zo is er alleen energie nodig om de robot van toestand te laten veranderen, maar niet om deze in een bepaalde vorm te houden.
De wetenschappers gaan er vanuit dat een keten van dergelijke ringen alle vormen kan aannemen, zolang deze maar lang genoeg is. Dit concept is afgekeken van hoe eiwitten in het lichaam worden gevormd; deze bestaan bij de fabricage ook uit lange ketens die vervolgens in een specifieke 3d-structuur worden gevouwen. Er bestaan miljoenen verschillende soorten eiwitten die allemaal hun eigen vorm hebben.
Voorlopig hebben de wetenschappers slechts op millimeterschaal dergelijke vouwbare robots ontwikkeld. Er wordt echter gewerkt aan varianten die zo groot zijn als mensen
(tweakers.net)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Playing Catch and Juggling with a Humanoid Robot
Robots in entertainment environments typically do not allow for physical interaction and contact with people. However, catching and throwing back objects is one form of physical engagement that still maintains a safe distance between the robot and participants. Using an animatronic humanoid robot, we developed a test bed for a throwing and catching game scenario.
We use an external camera system (ASUS Xtion PRO LIVE) to locate balls and a Kalman filter to predict ball destination and timing. The robot's hand and joint-space are calibrated to the vision coordinate system using a least-squares technique, such that the hand can be positioned to the predicted location. Successful catches are thrown back two and a half meters forward to the participant, and missed catches are detected to trigger suitable animations that indicate failure.
Human to robot partner juggling (three ball cascade pattern, one hand for each partner) is also achieved by speeding up the catching/throwing cycle. We tested the throwing/catching system on six participants (one child and five adults, including one elderly), and the juggling system on three skilled jugglers.
Robots in entertainment environments typically do not allow for physical interaction and contact with people. However, catching and throwing back objects is one form of physical engagement that still maintains a safe distance between the robot and participants. Using an animatronic humanoid robot, we developed a test bed for a throwing and catching game scenario.
We use an external camera system (ASUS Xtion PRO LIVE) to locate balls and a Kalman filter to predict ball destination and timing. The robot's hand and joint-space are calibrated to the vision coordinate system using a least-squares technique, such that the hand can be positioned to the predicted location. Successful catches are thrown back two and a half meters forward to the participant, and missed catches are detected to trigger suitable animations that indicate failure.
Human to robot partner juggling (three ball cascade pattern, one hand for each partner) is also achieved by speeding up the catching/throwing cycle. We tested the throwing/catching system on six participants (one child and five adults, including one elderly), and the juggling system on three skilled jugglers.

"An educated citizenry is a vital requisite for our survival as a free people."
06-12-2012
Een record: zwemmende robot steekt Stille Oceaan over
Zwemmende robot Papa Mau heeft een wereldrecord neergezet: de robot stak de Stille Oceaan over en voltooide met zijn aankomst in Australië de langste reis die ooit door een autonoom voertuig is afgelegd.
‘Wave Glider’ Papa Mau legde in totaal 16.668 kilometer af. En het was een veelbewogen trip: de robot kreeg tijdens zijn reis die meer dan een jaar duurde, onder meer te maken met haaien en zware stormen. Maar Papa Mau liet zich niet tegenhouden en rondde de oversteek af door keurig in Australië te arriveren.
Gegevens
Terwijl de robot aan zijn recordpoging bezig was, verzamelde deze ook nog eens allerhande gegevens. Bijvoorbeeld de watertemperatuur, maar ook informatie over het zoutgehalte van het water en de weersomstandigheden. Die informatie wordt nu aan wetenschappers verstrekt. Zij kunnen de gegevens onder meer gaan gebruiken in studies naar de gezondheid van de oceanen.
Trots
“Stellen dat we blij en trots zijn dat Papa Mau zijn eindbestemming heeft bereikt, is een understatement,” stelt Bill Vass, algemeen directeur van Liquid Robotics, het bedrijf dat de robots bouwde. “We startten de PacX-reis (PacX staat voor Pacific Crossing, red.) om aan te tonen dat de Wave Glider-technologie niet alleen de grote zeeën en zo’n lange reis kon overleven, maar belangrijker nog: ook real-time informatie over de meest afgelegen delen van de Stille Oceaan kon verzamelen en versturen.”
Papa Mau was overigens niet de enige robot van Liquid Robotics die onderweg was om geschiedenis te schrijven. Ook robot Benjamin is nog onderweg, deze komt naar verwachting begin 2013 in Australië aan. En dan zijn er nog twee robots onderweg naar Japan.
(scientias.nl)
Een record: zwemmende robot steekt Stille Oceaan over

Zwemmende robot Papa Mau heeft een wereldrecord neergezet: de robot stak de Stille Oceaan over en voltooide met zijn aankomst in Australië de langste reis die ooit door een autonoom voertuig is afgelegd.
‘Wave Glider’ Papa Mau legde in totaal 16.668 kilometer af. En het was een veelbewogen trip: de robot kreeg tijdens zijn reis die meer dan een jaar duurde, onder meer te maken met haaien en zware stormen. Maar Papa Mau liet zich niet tegenhouden en rondde de oversteek af door keurig in Australië te arriveren.
Gegevens
Terwijl de robot aan zijn recordpoging bezig was, verzamelde deze ook nog eens allerhande gegevens. Bijvoorbeeld de watertemperatuur, maar ook informatie over het zoutgehalte van het water en de weersomstandigheden. Die informatie wordt nu aan wetenschappers verstrekt. Zij kunnen de gegevens onder meer gaan gebruiken in studies naar de gezondheid van de oceanen.
Trots
“Stellen dat we blij en trots zijn dat Papa Mau zijn eindbestemming heeft bereikt, is een understatement,” stelt Bill Vass, algemeen directeur van Liquid Robotics, het bedrijf dat de robots bouwde. “We startten de PacX-reis (PacX staat voor Pacific Crossing, red.) om aan te tonen dat de Wave Glider-technologie niet alleen de grote zeeën en zo’n lange reis kon overleven, maar belangrijker nog: ook real-time informatie over de meest afgelegen delen van de Stille Oceaan kon verzamelen en versturen.”
Papa Mau was overigens niet de enige robot van Liquid Robotics die onderweg was om geschiedenis te schrijven. Ook robot Benjamin is nog onderweg, deze komt naar verwachting begin 2013 in Australië aan. En dan zijn er nog twee robots onderweg naar Japan.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Langzaam aan beginnen drones meer op zwevende robots te lijken. Echt een vreemd gezicht:
While we're well aware that robots will prove our undoing, we didn't expect DARPA to make it so... easy. It just demonstrated and helped fund the MLB Company's V-Bat, a testbed UAV that can fly or hover while brandishing a 6-foot claw. Yes, we know what you're thinking. Officially, there's an innocuous reason for the giant arm: a stereo vision system, in tandem with GPS, lets the robot precisely deliver one-pound payloads with the kind of reach that us fleshy anthropods wouldn't have. We're not quite so comforted after realizing that the robot can find its target without human input, however. DARPA sees the V-Bat as a stepping stone towards more autonomous vehicles, and it likely has noble intentions at heart. If V-Bat's descendants ultimately decide that humans are the payload, though, we'll know exactly who to blame.
http://www.engadget.com/2(...)ne-with-6-foot-claw/

While we're well aware that robots will prove our undoing, we didn't expect DARPA to make it so... easy. It just demonstrated and helped fund the MLB Company's V-Bat, a testbed UAV that can fly or hover while brandishing a 6-foot claw. Yes, we know what you're thinking. Officially, there's an innocuous reason for the giant arm: a stereo vision system, in tandem with GPS, lets the robot precisely deliver one-pound payloads with the kind of reach that us fleshy anthropods wouldn't have. We're not quite so comforted after realizing that the robot can find its target without human input, however. DARPA sees the V-Bat as a stepping stone towards more autonomous vehicles, and it likely has noble intentions at heart. If V-Bat's descendants ultimately decide that humans are the payload, though, we'll know exactly who to blame.

http://www.engadget.com/2(...)ne-with-6-foot-claw/
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

12-12-2012
Mini-robot gaat Japanse astronauten gezelschap houden
Japanse astronauten die volgend jaar naar het internationale ruimtestation vertrekken, hoeven in ieder geval niet bang te zijn voor de eenzaamheid. Een speciaal voor de ruimtemissie ontwikkelde mini-robot gaat met ze mee.
De Japanse ruimtevaartorganisatie vond dat het tijd werd om op zoek te gaan naar een oplossing voor sociale problemen die astronauten aan boord van het ISS kunnen ervaren. Een speciaal projectteam werkte het afgelopen jaar aan een oplossing: een robot die astronauten gezelschap kan houden.
Communicatie
Het resulteerde in een robot van ongeveer 34 centimeter hoog en een kilo zwaar. De robot kan onder meer spraak herkennen en verwerken, zelf spreken en gezichten herkennen. Aangezien de robot vooral een sociale functie heeft, hebben de onderzoekers ervoor gekozen om de robot een vrij menselijk uiterlijk te geven, met een hoofd, twee armen en twee benen. De robot kan niet alleen met astronauten communiceren, maar ook informatie naar de aarde sturen en dus dienst doen als een soort PR-medewerker in de ruimte.
Gesprek in de ruimte
Volgend jaar gaat de robot met een Japanse astronaut de ruimte in. Een mijlpaal: voor het eerst zullen een robot en een mens dan in de ruimte een gesprek voeren.
De robot is het resultaat van een samenwerking tussen verschillende bedrijven en onderzoeksinstellingen, waaronder de universiteit van Tokyo. Als het aan de ontwikkelaars ligt, is de robot niet het eindstation: de ervaringen die straks op aarde en in de ruimte met de robot worden opgedaan, kunnen weer gebruikt worden om een robot te ontwikkelen die nog beter in staat is om met mensen samen te leven.
(scientias.nl)
Mini-robot gaat Japanse astronauten gezelschap houden

Japanse astronauten die volgend jaar naar het internationale ruimtestation vertrekken, hoeven in ieder geval niet bang te zijn voor de eenzaamheid. Een speciaal voor de ruimtemissie ontwikkelde mini-robot gaat met ze mee.
De Japanse ruimtevaartorganisatie vond dat het tijd werd om op zoek te gaan naar een oplossing voor sociale problemen die astronauten aan boord van het ISS kunnen ervaren. Een speciaal projectteam werkte het afgelopen jaar aan een oplossing: een robot die astronauten gezelschap kan houden.
Communicatie
Het resulteerde in een robot van ongeveer 34 centimeter hoog en een kilo zwaar. De robot kan onder meer spraak herkennen en verwerken, zelf spreken en gezichten herkennen. Aangezien de robot vooral een sociale functie heeft, hebben de onderzoekers ervoor gekozen om de robot een vrij menselijk uiterlijk te geven, met een hoofd, twee armen en twee benen. De robot kan niet alleen met astronauten communiceren, maar ook informatie naar de aarde sturen en dus dienst doen als een soort PR-medewerker in de ruimte.
Gesprek in de ruimte
Volgend jaar gaat de robot met een Japanse astronaut de ruimte in. Een mijlpaal: voor het eerst zullen een robot en een mens dan in de ruimte een gesprek voeren.
De robot is het resultaat van een samenwerking tussen verschillende bedrijven en onderzoeksinstellingen, waaronder de universiteit van Tokyo. Als het aan de ontwikkelaars ligt, is de robot niet het eindstation: de ervaringen die straks op aarde en in de ruimte met de robot worden opgedaan, kunnen weer gebruikt worden om een robot te ontwikkelen die nog beter in staat is om met mensen samen te leven.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Japanese Researchers Continue Quest To Build Life-Like Humanoid Robots
In the graphic novel The Watchmen, the physicist Jon Osterman is vaporized in an experiment and comes back as the god-like Doctor Manhattan after meticulously putting himself together again one organ system at a time. In a way, Japanese researchers are doing their own version of this through efforts to create human-like robots, though it’s requiring a much longer time frame to make a person out of metal and plastics.
In a recent effort to mimic the human musculoskeletal system, researchers at the University of Tokyo unveiled Kenshiro, a 50-kg robot that has the bones and muscles akin to a 12-year-old boy. The bones are made from aluminum, and the bot has individual ribs as well as floating knee cap (patella). Kenshiro was designed with many of the major muscle groups of the body, 160 in total with most of them being in the torso and legs. The muscles consist of pulley systems driven by single actuators to create planar muscles rather than point-to-point cables used previously.
Combined, these systems produce joint motion that is close to the rate that humans can move joints, thanks to a design that balances power, flexibility, and weight.
Here’s Kenshiro in action:
This latest bot is an extension of the Kojiro robot that was revealed in 2010, which had many of the joints found in humans but did not expressly mimic individual bones and muscles. Kenshiro is a refinement for sure as the new bones and muscle systems allow Kenshiro greater degrees of freedom: 64 in total, compared to 60 in Kojiro. However, this redesign has given Kenshiro a total power output five times more than Kojiro.
But more importantly, bones and planar muscles are what humans are made of, so this achievement is significant toward the development of androids that are anatomically similar to us.
Check out the video on Kojiro to see the difference in form and function:
For all these cool developments, it’s important to realize just how far robotics need to go to get to truly physical “human-like” state. For instance, last year Japanese researchers at AIST unveiled to the world a male version of their female Actroid-F android robot, which mimics the movements of people under observation. Their life-likeness is relative, as they only have 12 degrees of freedom in the face, making expressions rather limited. Additionally, the male version turned out to be the same as the female version, just with different hair and clothes.
It’s worth taking a look at the “ultra-realistic” bots, as Diginfo dubbed them, to get a sense of how far things still need to progress to get to a version that we could interact with and not have the creepy Uncanny Valley experience noted by many:
In the years to come, news of robotics development will only increase as we watch researchers put humans together much like Doctor Manhattan. Whether individual bones and muscles will work best or some other design will prove superior will only be resolved once each design can be tested. In the end, the greatest challenge may not be creating individual robotics systems or artificial intelligence, but packing all of these components into a single robot.
One thing is clear: when it comes to androids, our best gauge of “human-like” may be how freaked out we are when we discover that the person we are speaking to is a robot.
http://singularityhub.com(...)ike-humanoid-robots/
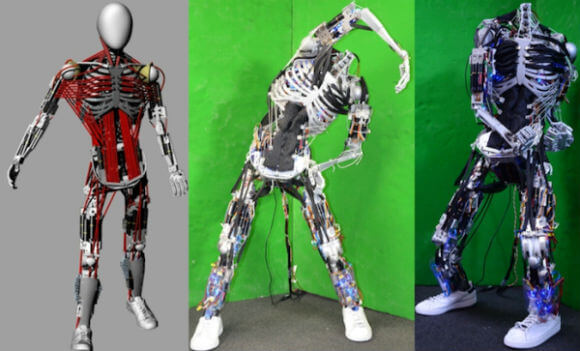
In the graphic novel The Watchmen, the physicist Jon Osterman is vaporized in an experiment and comes back as the god-like Doctor Manhattan after meticulously putting himself together again one organ system at a time. In a way, Japanese researchers are doing their own version of this through efforts to create human-like robots, though it’s requiring a much longer time frame to make a person out of metal and plastics.
In a recent effort to mimic the human musculoskeletal system, researchers at the University of Tokyo unveiled Kenshiro, a 50-kg robot that has the bones and muscles akin to a 12-year-old boy. The bones are made from aluminum, and the bot has individual ribs as well as floating knee cap (patella). Kenshiro was designed with many of the major muscle groups of the body, 160 in total with most of them being in the torso and legs. The muscles consist of pulley systems driven by single actuators to create planar muscles rather than point-to-point cables used previously.
Combined, these systems produce joint motion that is close to the rate that humans can move joints, thanks to a design that balances power, flexibility, and weight.
Here’s Kenshiro in action:

This latest bot is an extension of the Kojiro robot that was revealed in 2010, which had many of the joints found in humans but did not expressly mimic individual bones and muscles. Kenshiro is a refinement for sure as the new bones and muscle systems allow Kenshiro greater degrees of freedom: 64 in total, compared to 60 in Kojiro. However, this redesign has given Kenshiro a total power output five times more than Kojiro.
But more importantly, bones and planar muscles are what humans are made of, so this achievement is significant toward the development of androids that are anatomically similar to us.
Check out the video on Kojiro to see the difference in form and function:

For all these cool developments, it’s important to realize just how far robotics need to go to get to truly physical “human-like” state. For instance, last year Japanese researchers at AIST unveiled to the world a male version of their female Actroid-F android robot, which mimics the movements of people under observation. Their life-likeness is relative, as they only have 12 degrees of freedom in the face, making expressions rather limited. Additionally, the male version turned out to be the same as the female version, just with different hair and clothes.
It’s worth taking a look at the “ultra-realistic” bots, as Diginfo dubbed them, to get a sense of how far things still need to progress to get to a version that we could interact with and not have the creepy Uncanny Valley experience noted by many:

In the years to come, news of robotics development will only increase as we watch researchers put humans together much like Doctor Manhattan. Whether individual bones and muscles will work best or some other design will prove superior will only be resolved once each design can be tested. In the end, the greatest challenge may not be creating individual robotics systems or artificial intelligence, but packing all of these components into a single robot.
One thing is clear: when it comes to androids, our best gauge of “human-like” may be how freaked out we are when we discover that the person we are speaking to is a robot.
http://singularityhub.com(...)ike-humanoid-robots/
"An educated citizenry is a vital requisite for our survival as a free people."
Nice! Laatst ook een docu gezien waarbij ze een rolstoel met gedachten besturen!
Mind-controlled robotic arm has skill and speed of human limb
LONDON (Reuters) - A paralyzed woman has been able to feed herself chocolate and move everyday items using a robotic arm directly controlled by thought, showing a level of agility and control approaching that of a human limb.
Jan Scheuermann, 53, from Pittsburgh, was diagnosed with a degenerative brain disorder 13 years ago and is paralyzed from the neck down.
"It's so cool," said Scheuermann during a news conference. "I'm moving things. I have not moved things for about 10 years ... It's not a matter of thinking which direction anymore it's just a matter of thinking ‘I want to do that'."
She was shown feeding herself string cheese and chocolate unaided as well as moving a series of objects in tests designed for recovering stroke victims, and she was able to do it with speeds comparable to the able bodied.
Experts are calling it a remarkable step forward for prosthetics controlled directly by the brain. Other systems have already allowed paralyzed patients to type or write in freehand simply by thinking about the letters they want.
In the past month, researchers in Switzerland also used electrodes implanted directly on the retina to enable a blind patient to read.
The development of brain-machine interfaces is moving quickly and scientists predict the technology could eventually be used to bypass nerve damage and re-awaken a person's own paralyzed muscles.
In the meantime, they say, systems like the one developed by the U.S. researchers could be paired with robotic "exoskeletons" that allow paraplegics and quadriplegics to walk.
For Scheuermann, the experience has already been transforming.
"It's given her a renewed purpose," Michael Boninger, who worked on the study published in The Lancet, told Reuters. "On the first day that we had her move the arm, there was this amazing smile of joy. She could think about moving her wrist and something happened."
COMPLEX ALGORITHM
The research team from the University of Pittsburgh Medical Center implanted two microelectrode devices into the woman's left motor cortex, the part of the brain that initiates movement.
The medics used a real-time brain scanning technique called functional magnetic resonance imaging to find the exact part of the brain that lit up after the patient was asked to think about moving her now unresponsive arms.
The electrodes were connected to the robotic hand via a computer running a complex algorithm to translate the signals that mimics the way an unimpaired brain controls healthy limbs.
"These electrodes are remarkable devices in that they are very small," Boninger said. "You can't buy them in Radio Shack."
But Boninger said the way the algorithm operates is the main advance. Accurately translating brain signals has been one of the biggest challenges in mind-controlled prosthetics.
"There is no limit now to decoding human motion," he said. "It gets more complex when you work on parts like the hand, but I think that, once you can tap into desired motion in the brain, then how that motion is effected has a wide range of possibilities."
It took weeks of training for Scheuermann to master control of the hand, but she was able to move it after just two days, and over time she completed tasks - such as picking up objects, orientating them, and moving them to a target position - with a 91.6 percent success rate. Her speed increased with practice.
The researchers plan to incorporate wireless technology to remove the need for a wired connection between the patient's head and the prosthesis.
They also believe a sensory loop could be added that gives feedback to the brain, allowing the user to tell the difference between hot and cold, or smooth and rough surfaces.
Grégoire Courtine, at the Swiss Federal Institute of Technology in Lausanne, hailed the project. "This bioinspired brain-machine interface is a remarkable technological and biomedical achievement."
"Though plenty of challenges lie ahead, these sorts of systems are rapidly approaching the point of clinical fruition," Courtine, who was not involved in the study, said in a comment piece in the Lancet linked to the study.
ETHICAL QUESTIONS
Although using technology to restore movement, sight or hearing in the disabled would for many seem uncontroversial, some disability rights groups and ethicists are wary.
They argue that restoring hearing, for instance, could fuel a prejudice that a deaf life is less rich, or less well lived.
Andy Miah, a professor at the University of the West of Scotland who has written extensively about human enhancement in the context of the Paralympics, says it is far from straightforward.
"For instance, a few years ago, there was a case of a deaf lesbian couple who sought to use in vitro fertilization to select for deafness," he said.
"They argued that absence of hearing is precisely not an impairment, but allows access to a rich community."
The ethics become more complex with the prospect of using these technologies to enhance the able-bodied.
"It's quite likely that therapy is the back door to enhancement in these kinds of technological interventions," says Miah. "People will question whether this is desirable, but we already live in a society that tolerates such modifications.
"Laser eye surgery interventions have grown astronomically over the last decade and nobody complains that it is making people superhuman."
http://news.yahoo.com/min(...)human-011916152.html
Mind-controlled robotic arm has skill and speed of human limb

LONDON (Reuters) - A paralyzed woman has been able to feed herself chocolate and move everyday items using a robotic arm directly controlled by thought, showing a level of agility and control approaching that of a human limb.
Jan Scheuermann, 53, from Pittsburgh, was diagnosed with a degenerative brain disorder 13 years ago and is paralyzed from the neck down.
"It's so cool," said Scheuermann during a news conference. "I'm moving things. I have not moved things for about 10 years ... It's not a matter of thinking which direction anymore it's just a matter of thinking ‘I want to do that'."
She was shown feeding herself string cheese and chocolate unaided as well as moving a series of objects in tests designed for recovering stroke victims, and she was able to do it with speeds comparable to the able bodied.
Experts are calling it a remarkable step forward for prosthetics controlled directly by the brain. Other systems have already allowed paralyzed patients to type or write in freehand simply by thinking about the letters they want.
In the past month, researchers in Switzerland also used electrodes implanted directly on the retina to enable a blind patient to read.
The development of brain-machine interfaces is moving quickly and scientists predict the technology could eventually be used to bypass nerve damage and re-awaken a person's own paralyzed muscles.
In the meantime, they say, systems like the one developed by the U.S. researchers could be paired with robotic "exoskeletons" that allow paraplegics and quadriplegics to walk.
For Scheuermann, the experience has already been transforming.
"It's given her a renewed purpose," Michael Boninger, who worked on the study published in The Lancet, told Reuters. "On the first day that we had her move the arm, there was this amazing smile of joy. She could think about moving her wrist and something happened."
COMPLEX ALGORITHM
The research team from the University of Pittsburgh Medical Center implanted two microelectrode devices into the woman's left motor cortex, the part of the brain that initiates movement.
The medics used a real-time brain scanning technique called functional magnetic resonance imaging to find the exact part of the brain that lit up after the patient was asked to think about moving her now unresponsive arms.
The electrodes were connected to the robotic hand via a computer running a complex algorithm to translate the signals that mimics the way an unimpaired brain controls healthy limbs.
"These electrodes are remarkable devices in that they are very small," Boninger said. "You can't buy them in Radio Shack."
But Boninger said the way the algorithm operates is the main advance. Accurately translating brain signals has been one of the biggest challenges in mind-controlled prosthetics.
"There is no limit now to decoding human motion," he said. "It gets more complex when you work on parts like the hand, but I think that, once you can tap into desired motion in the brain, then how that motion is effected has a wide range of possibilities."
It took weeks of training for Scheuermann to master control of the hand, but she was able to move it after just two days, and over time she completed tasks - such as picking up objects, orientating them, and moving them to a target position - with a 91.6 percent success rate. Her speed increased with practice.
The researchers plan to incorporate wireless technology to remove the need for a wired connection between the patient's head and the prosthesis.
They also believe a sensory loop could be added that gives feedback to the brain, allowing the user to tell the difference between hot and cold, or smooth and rough surfaces.
Grégoire Courtine, at the Swiss Federal Institute of Technology in Lausanne, hailed the project. "This bioinspired brain-machine interface is a remarkable technological and biomedical achievement."
"Though plenty of challenges lie ahead, these sorts of systems are rapidly approaching the point of clinical fruition," Courtine, who was not involved in the study, said in a comment piece in the Lancet linked to the study.
ETHICAL QUESTIONS
Although using technology to restore movement, sight or hearing in the disabled would for many seem uncontroversial, some disability rights groups and ethicists are wary.
They argue that restoring hearing, for instance, could fuel a prejudice that a deaf life is less rich, or less well lived.
Andy Miah, a professor at the University of the West of Scotland who has written extensively about human enhancement in the context of the Paralympics, says it is far from straightforward.
"For instance, a few years ago, there was a case of a deaf lesbian couple who sought to use in vitro fertilization to select for deafness," he said.
"They argued that absence of hearing is precisely not an impairment, but allows access to a rich community."
The ethics become more complex with the prospect of using these technologies to enhance the able-bodied.
"It's quite likely that therapy is the back door to enhancement in these kinds of technological interventions," says Miah. "People will question whether this is desirable, but we already live in a society that tolerates such modifications.
"Laser eye surgery interventions have grown astronomically over the last decade and nobody complains that it is making people superhuman."
http://news.yahoo.com/min(...)human-011916152.html
"An educated citizenry is a vital requisite for our survival as a free people."
Tendon Driven Humanoid Robot
Ook de zwitsers zijn bezig met een Life-Like Humanoid Robot.


Ook de zwitsers zijn bezig met een Life-Like Humanoid Robot.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen

"An educated citizenry is a vital requisite for our survival as a free people."
25-01-2013
Print je eigen robot met 3D-printer
Een Fransman geeft zijn ontwerpen en bouwinstructies vrij voor een robot die je kan maken met 3D-printers. Het ontwerp moet doe-het-zelvers InMoov-robots laten bouwen met makkelijk verkrijgbare en relatief goedkope onderdelen, meldt Tweakers.net.
De Franse beeldhouwer en modelmaker Gael Langevin heeft ongeveer een jaar gewerkt aan zijn robotontwerp. InMoov werd gedurende die tijd steeds verder verfijnd en kan inmiddels geprint worden volgens de instructies die Langevin op zijn blog zette.
De humanoïde robot bestaat uit een hoofd, torso en twee armen. Alle onderdelen worden middels servo's aangestuurd en InMoov kan bediend worden met de stem van de eigenaar.
(HLN)
Print je eigen robot met 3D-printer

Een Fransman geeft zijn ontwerpen en bouwinstructies vrij voor een robot die je kan maken met 3D-printers. Het ontwerp moet doe-het-zelvers InMoov-robots laten bouwen met makkelijk verkrijgbare en relatief goedkope onderdelen, meldt Tweakers.net.
De Franse beeldhouwer en modelmaker Gael Langevin heeft ongeveer een jaar gewerkt aan zijn robotontwerp. InMoov werd gedurende die tijd steeds verder verfijnd en kan inmiddels geprint worden volgens de instructies die Langevin op zijn blog zette.
De humanoïde robot bestaat uit een hoofd, torso en twee armen. Alle onderdelen worden middels servo's aangestuurd en InMoov kan bediend worden met de stem van de eigenaar.

(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
06-02-2013
Wetenschappers maken bionische mens
In Londen hebben wetenschappers een robot gepresenteerd die voor een groot gedeelte uit menselijke protheses bestaat. Met nagemaakte 'menselijke' onderdelen hopen de makers een volledig bionische robot te maken. De robot beschikt onder andere over een synthetisch hart.
De robot, die de naam Rex heeft gekregen, is ontwikkeld door de John Hopkins University in Baltimore en heeft tot nu toe ongeveer 1 miljoen dollar gekost. Volgens de makers is het de eerste bionische mens gebouwd uit protheses en synthetische organen. Rex beschikt onder andere over voet-, hand-, knie- en retina-protheses. Ook zijn er enkele inwendige organen ingebouwd, waaronder een kunstmatig hart dat zelfstandig kan functioneren.
In de toekomst willen de wetenschappers de bionische robot nog een aantal kunstmatige organen geven, waaronder een stel longen, een alvleesklier en een blaas. Het is nog onduidelijk wanneer Rex deze onderdelen zal ontvangen. Momenteel zou 60 tot 70 procent van de robot al uit nagemaakte menselijke onderdelen bestaan. Het zou echter nog niet mogelijk zijn om een mens in zijn geheel na te bouwen. Het is bijvoorbeeld nog niet mogelijk om de hersenen na te maken.
De wetenschappers verwachten niet dat er binnen afzienbare tijd een volledige functionerende mens nagebootst kan worden. Wel verwachten zij dat er binnen 10 jaar robots zullen bestaan die uit zichzelf een pen oppakken en ermee kunnen schrijven. Rex zal worden getoond in het Science Museum in Londen.
(tweakers.net)
Wetenschappers maken bionische mens
In Londen hebben wetenschappers een robot gepresenteerd die voor een groot gedeelte uit menselijke protheses bestaat. Met nagemaakte 'menselijke' onderdelen hopen de makers een volledig bionische robot te maken. De robot beschikt onder andere over een synthetisch hart.
De robot, die de naam Rex heeft gekregen, is ontwikkeld door de John Hopkins University in Baltimore en heeft tot nu toe ongeveer 1 miljoen dollar gekost. Volgens de makers is het de eerste bionische mens gebouwd uit protheses en synthetische organen. Rex beschikt onder andere over voet-, hand-, knie- en retina-protheses. Ook zijn er enkele inwendige organen ingebouwd, waaronder een kunstmatig hart dat zelfstandig kan functioneren.
In de toekomst willen de wetenschappers de bionische robot nog een aantal kunstmatige organen geven, waaronder een stel longen, een alvleesklier en een blaas. Het is nog onduidelijk wanneer Rex deze onderdelen zal ontvangen. Momenteel zou 60 tot 70 procent van de robot al uit nagemaakte menselijke onderdelen bestaan. Het zou echter nog niet mogelijk zijn om een mens in zijn geheel na te bouwen. Het is bijvoorbeeld nog niet mogelijk om de hersenen na te maken.
De wetenschappers verwachten niet dat er binnen afzienbare tijd een volledige functionerende mens nagebootst kan worden. Wel verwachten zij dat er binnen 10 jaar robots zullen bestaan die uit zichzelf een pen oppakken en ermee kunnen schrijven. Rex zal worden getoond in het Science Museum in Londen.

(tweakers.net)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
08-02-2013
Badmintonrobot verhoogt efficiency
Het Flanders’ Mechatronics Technology Centre (FMTC) in het Belgische Heverlee heeft naar eigen zeggen de eerste robot ter wereld ontwikkeld, die in staat is om badminton te spelen.
Erg spectaculair ziet het langs een rail bewegende apparaat er niet uit en eigenlijk doet het er ook niet toe hoe nauwkeurig de automaat een shuttle kan retourneren. Het onderzoeksteam onder leiding van dr. Wim Symens heeft de sportieve robot vooral ontworpen om na te gaan hoe de energie-efficiëntie van het gebruikte computerprogramma te verbeteren valt. Het energieverbruik blijkt met vijftig procent omlaag te kunnen. Inmiddels heeft onder meer een producent van weefmachines belangstelling voor de ontwikkelde software getoond.
(technischweekblad.nl)
Badmintonrobot verhoogt efficiency
Het Flanders’ Mechatronics Technology Centre (FMTC) in het Belgische Heverlee heeft naar eigen zeggen de eerste robot ter wereld ontwikkeld, die in staat is om badminton te spelen.
Erg spectaculair ziet het langs een rail bewegende apparaat er niet uit en eigenlijk doet het er ook niet toe hoe nauwkeurig de automaat een shuttle kan retourneren. Het onderzoeksteam onder leiding van dr. Wim Symens heeft de sportieve robot vooral ontworpen om na te gaan hoe de energie-efficiëntie van het gebruikte computerprogramma te verbeteren valt. Het energieverbruik blijkt met vijftig procent omlaag te kunnen. Inmiddels heeft onder meer een producent van weefmachines belangstelling voor de ontwikkelde software getoond.
(technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
11-02-2013
Exotherme reactie laat siliconen stuiteren
Harvard-onderzoekers hebben een robot bedacht die zich voortbeweegt dankzij explosies in zijn binnenste. Angewandte Chemie bericht over deze verrassende nieuwe toepassing van siliconenrubber, waarvan het nut helaas niet helemaal duidelijk is.
Dat het siliconenrubber het nog overleeft ook, is wellicht de opvallendste conclusie van George Whitesides (toch al een van de meest geciteerde chemici ter wereld) en collega’s.
De ‘zachte robot’ heeft de vorm van een driepuntige ster. De ‘benen’ zijn hol, en kunnen via leidingen worden gevuld met een mengsel van methaan en zuurstof. Via elektrische draden kun je vervolgens in een been naar keuze een vonk genereren die het gasmengsel laat reageren tot koolstofdioxide en water. Door de knal springt de robot minstens 30 cm de lucht in.
Dat dit functioneert heeft alles te maken met terugslagklepjes, die eveneens van silicium zijn gemaakt. Tijdens de explosie worden ze dichtgedrukt door de overdruk. Als daarna door afkoeling de druk weer terugloopt, gaat de klep weer open en laat de afgassen uit.
Volgens de onderzoekers kan zo’n ster minstens 30 sprongen achter elkaar maken zonder dat het siliconenrubber het door de hitte begeeft.
Volgens de nieuwsredactie van Nature dromen de onderzoekers al van een sterk vergrote versie voor reddingsoperaties in ruw terrein. Het idee is dan dat je hem over obstakels heen laat springen.
bron: news@nature
(c2w.nl)
Exotherme reactie laat siliconen stuiteren

Harvard-onderzoekers hebben een robot bedacht die zich voortbeweegt dankzij explosies in zijn binnenste. Angewandte Chemie bericht over deze verrassende nieuwe toepassing van siliconenrubber, waarvan het nut helaas niet helemaal duidelijk is.
Dat het siliconenrubber het nog overleeft ook, is wellicht de opvallendste conclusie van George Whitesides (toch al een van de meest geciteerde chemici ter wereld) en collega’s.
De ‘zachte robot’ heeft de vorm van een driepuntige ster. De ‘benen’ zijn hol, en kunnen via leidingen worden gevuld met een mengsel van methaan en zuurstof. Via elektrische draden kun je vervolgens in een been naar keuze een vonk genereren die het gasmengsel laat reageren tot koolstofdioxide en water. Door de knal springt de robot minstens 30 cm de lucht in.
Dat dit functioneert heeft alles te maken met terugslagklepjes, die eveneens van silicium zijn gemaakt. Tijdens de explosie worden ze dichtgedrukt door de overdruk. Als daarna door afkoeling de druk weer terugloopt, gaat de klep weer open en laat de afgassen uit.
Volgens de onderzoekers kan zo’n ster minstens 30 sprongen achter elkaar maken zonder dat het siliconenrubber het door de hitte begeeft.
Volgens de nieuwsredactie van Nature dromen de onderzoekers al van een sterk vergrote versie voor reddingsoperaties in ruw terrein. Het idee is dan dat je hem over obstakels heen laat springen.
bron: news@nature
(c2w.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
25-02-2013
Academici stellen gebruik van "dodelijke robots" in vraag
Mensenrechtenorganisaties en academici bereiden een campagne voor tegen het gebruik van "dodelijke robots" in oorlogsvoering, dat bericht de Amerikaanse technologiesite Wired. "In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid", klinkt het onder andere. De tegenstanders vinden het gebruik van de toestellen bovendien weinig legaal en transparant.
"In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid. Vooral jongemannen die heel goed videospelletjes kunnen spelen, maken kans om aangenomen te worden, aldus initiatiefnemer Noel Sharkey, professor robotica aan de universiteit van Sheffield. Sharkey klaagt ook de manier van werken aan: "De mannen houden een zwerm robots in de gaten, terwijl ze zelf amper gecontroleerd worden".
"Het is een branche waar heel veel geld mee gemoeid is", vervolgt hij, "maar er is een groot gebrek aan transparantie en legaliteit". "Mensen zijn denkende wezens met gevoelens. Wie zal aansprakelijk worden gesteld als het met een robot misloopt?", stelt de professor in vraag. "Zeker niet de robot."
De campagne kwam eind vorig jaar voor het eerst ter sprake na de bekendmaking van een rapport over oorlogsvoering met robots. De publicatie pleitte onder andere voor de stopzetting van de praktijk, alvorens ze algemeen gangbaar wordt. Ook drukkingsgroepen, activisten, andere academici en Jody Williams, die in 1997 de Nobelprijs voor de Vrede won, zetten hun schouders onder het initiatief.
De campagne gaat in april van start in het Britse Lagerhuis.
(HLN)
Academici stellen gebruik van "dodelijke robots" in vraag

Mensenrechtenorganisaties en academici bereiden een campagne voor tegen het gebruik van "dodelijke robots" in oorlogsvoering, dat bericht de Amerikaanse technologiesite Wired. "In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid", klinkt het onder andere. De tegenstanders vinden het gebruik van de toestellen bovendien weinig legaal en transparant.
"In de VS worden tegenwoordig meer bestuurders van drones dan echte vliegtuigpiloten opgeleid. Vooral jongemannen die heel goed videospelletjes kunnen spelen, maken kans om aangenomen te worden, aldus initiatiefnemer Noel Sharkey, professor robotica aan de universiteit van Sheffield. Sharkey klaagt ook de manier van werken aan: "De mannen houden een zwerm robots in de gaten, terwijl ze zelf amper gecontroleerd worden".
"Het is een branche waar heel veel geld mee gemoeid is", vervolgt hij, "maar er is een groot gebrek aan transparantie en legaliteit". "Mensen zijn denkende wezens met gevoelens. Wie zal aansprakelijk worden gesteld als het met een robot misloopt?", stelt de professor in vraag. "Zeker niet de robot."
De campagne kwam eind vorig jaar voor het eerst ter sprake na de bekendmaking van een rapport over oorlogsvoering met robots. De publicatie pleitte onder andere voor de stopzetting van de praktijk, alvorens ze algemeen gangbaar wordt. Ook drukkingsgroepen, activisten, andere academici en Jody Williams, die in 1997 de Nobelprijs voor de Vrede won, zetten hun schouders onder het initiatief.
De campagne gaat in april van start in het Britse Lagerhuis.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
27-02-2013
Wetenschappers bouwen robotische vleermuisvleugel
Wat Batman kan, kunnen wetenschappers ook! Onderzoekers van Brown University hebben een heuse robotische vleermuisvleugel gebouwd.
De onderzoekers lieten zich voor de bouw van de vleugel inspireren door de grote vleermuis, of de vleerhond. De vleugel kan in een windtunnel op en neer klappen en genoeg kracht leveren om het luchtruim te kiezen en de luchtweerstand te weerstaan.
Experimenteren
De onderzoekers ontwikkelden de robotische vleugel om meer te weten te komen over hoe vleermuizen vliegen. Wanneer de vleugel actief is, kunnen de onderzoekers tal van gegevens verzamelen die echte vleermuizen ze niet kunnen geven. “We kunnen een vleermuis niet vragen om met een frequentie van acht hertz met de vleugels te klappen en vervolgens de frequentie op te schroeven naar negen hertz, zodat we kunnen kijken of dat een verschil maakt,” legt onderzoeker Joseph Bahlman uit. “Vleermuizen werken zo niet.” De robotische vleugel daarentegen wel: deze doet precies wat de onderzoekers willen. “We kunnen vragen beantwoorden als: ‘Zorgt het frequenter klappen met de vleugels ervoor dat deze gemakkelijker opstijgen en hoeveel energie kost het om vaker met de vleugels te slaan?’.”
Fouten maken
Het ontwikkelen van de vleugel heeft de onderzoekers al veel opgeleverd. “We hebben veel over vleermuizen geleerd door hun vleugels na te maken en daarbij ook fouten te maken. Zo braken bepaalde ‘gewrichten’ van de robotvleugel herhaaldelijk af. Door deze te omwinden met staalkabel kon dat voorkomen worden: net zoals gewrichtsbanden dat bij echte vleermuizen voorkomen.
De onderzoekers zetten hun experiment met de robotische vleugel voort. “We zouden graag nog andere materialen voor de vleugel willen proberen,” vertelt Bahlman. De onderzoekers hopen dat het uiteindelijk informatie zal opleveren die we kunnen gebruiken voor het ontwerpen van kleine, zeer efficiënte vliegtuigen.
(Scientias.nl)
Wetenschappers bouwen robotische vleermuisvleugel

Wat Batman kan, kunnen wetenschappers ook! Onderzoekers van Brown University hebben een heuse robotische vleermuisvleugel gebouwd.
De onderzoekers lieten zich voor de bouw van de vleugel inspireren door de grote vleermuis, of de vleerhond. De vleugel kan in een windtunnel op en neer klappen en genoeg kracht leveren om het luchtruim te kiezen en de luchtweerstand te weerstaan.
Experimenteren
De onderzoekers ontwikkelden de robotische vleugel om meer te weten te komen over hoe vleermuizen vliegen. Wanneer de vleugel actief is, kunnen de onderzoekers tal van gegevens verzamelen die echte vleermuizen ze niet kunnen geven. “We kunnen een vleermuis niet vragen om met een frequentie van acht hertz met de vleugels te klappen en vervolgens de frequentie op te schroeven naar negen hertz, zodat we kunnen kijken of dat een verschil maakt,” legt onderzoeker Joseph Bahlman uit. “Vleermuizen werken zo niet.” De robotische vleugel daarentegen wel: deze doet precies wat de onderzoekers willen. “We kunnen vragen beantwoorden als: ‘Zorgt het frequenter klappen met de vleugels ervoor dat deze gemakkelijker opstijgen en hoeveel energie kost het om vaker met de vleugels te slaan?’.”
Fouten maken
Het ontwikkelen van de vleugel heeft de onderzoekers al veel opgeleverd. “We hebben veel over vleermuizen geleerd door hun vleugels na te maken en daarbij ook fouten te maken. Zo braken bepaalde ‘gewrichten’ van de robotvleugel herhaaldelijk af. Door deze te omwinden met staalkabel kon dat voorkomen worden: net zoals gewrichtsbanden dat bij echte vleermuizen voorkomen.
De onderzoekers zetten hun experiment met de robotische vleugel voort. “We zouden graag nog andere materialen voor de vleugel willen proberen,” vertelt Bahlman. De onderzoekers hopen dat het uiteindelijk informatie zal opleveren die we kunnen gebruiken voor het ontwerpen van kleine, zeer efficiënte vliegtuigen.
(Scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Big Dog is terug met upgrades 
Hij kan nu als een echte hond je stok terughalen....of jou gooien
Hij kan nu als een echte hond je stok terughalen....of jou gooien

Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
01-02-2013
Amerikaans leger laat sterke robot op 'menselijke manier' gooien
Het Amerikaanse leger heeft een sterke wandelende robot uitgerust met een arm waardoor het apparaat op een 'menselijke manier' kan gooien.
Foto: NU.nl Bekijk video
De BigDog, zoals de robot door ontwikkelaar Boston Dynamics genoemd is, is al sinds 2005 in ontwikkeling en wordt gefinancierd door het Amerikaanse leger.
De robot is 91 centimeter lang, 76 centimeter hoog en weegt 110 kilo. Het apparaat kan 6,5 kilometer per uur lopen en is in staat 150 kilo te tillen. De kracht en snelheid van de BigDog moet overigens nog verbeterd worden.
De robot kan zich door de vier poten met aparte sensoren gemakkelijk verplaatsten over moeilijk begaanbaar terrein. Deze poten bevatten drie computergestuurde gewrichten die 500 keer per seconde van positie kunnen veranderen.
Uit een filmpje dat door Boston Dynamics online is gezet, blijkt dat de BigDog nu ook een arm heeft waarmee hij in de video een betonblok optilt en weggooit.
"Het doel is technologieën te ontwikkelen die de kracht van de benen en torso gebruiken voor de beweging van de arm", aldus Boston Dynamics. "Deze benadering wordt door menselijke atleten al gebruikt en moet de prestaties van robots verbeteren."
Door: NU.nl/Colin van Hoek
(klik hier voor video)
(nu.nl)
Amerikaans leger laat sterke robot op 'menselijke manier' gooien
Het Amerikaanse leger heeft een sterke wandelende robot uitgerust met een arm waardoor het apparaat op een 'menselijke manier' kan gooien.

Foto: NU.nl Bekijk video
De BigDog, zoals de robot door ontwikkelaar Boston Dynamics genoemd is, is al sinds 2005 in ontwikkeling en wordt gefinancierd door het Amerikaanse leger.
De robot is 91 centimeter lang, 76 centimeter hoog en weegt 110 kilo. Het apparaat kan 6,5 kilometer per uur lopen en is in staat 150 kilo te tillen. De kracht en snelheid van de BigDog moet overigens nog verbeterd worden.
De robot kan zich door de vier poten met aparte sensoren gemakkelijk verplaatsten over moeilijk begaanbaar terrein. Deze poten bevatten drie computergestuurde gewrichten die 500 keer per seconde van positie kunnen veranderen.
Uit een filmpje dat door Boston Dynamics online is gezet, blijkt dat de BigDog nu ook een arm heeft waarmee hij in de video een betonblok optilt en weggooit.
"Het doel is technologieën te ontwikkelen die de kracht van de benen en torso gebruiken voor de beweging van de arm", aldus Boston Dynamics. "Deze benadering wordt door menselijke atleten al gebruikt en moet de prestaties van robots verbeteren."
Door: NU.nl/Colin van Hoek
(klik hier voor video)
(nu.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
...
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
quote:MIT ‘cheetah’ robot rivals running animals in efficiency
Robot’s custom-designed electric motors are powerful and efficient.
A 70-pound “cheetah” robot designed by MIT researchers may soon outpace its animal counterparts in running efficiency: In treadmill tests, the researchers have found that the robot — about the size and weight of an actual cheetah — wastes very little energy as it trots continuously for up to an hour and a half at 5 mph. The key to the robot’s streamlined stride: lightweight electric motors, set into its shoulders, that produce high torque with very little heat wasted.
The motors can be programmed to quickly adjust the robot’s leg stiffness and damping ratio — or cushioning — in response to outside forces such as a push, or a change in terrain. The researchers will present the efficiency results and design principles for their electric motor at the International Conference on Robotics and Automation in May.
Sangbae Kim, the Esther and Harold E. Edgerton Assistant Professor in MIT’s Department of Mechanical Engineering, says achieving energy-efficiency in legged robots has proven extremely difficult. Robots such as Boston Dynamic’s “Big Dog” carry heavy gasoline engines and hydraulic transmissions, while other electrically powered robots require large battery packs, gears, force sensors and springs to coordinate the joints in a robot’s leg. All this weighty machinery can add up to significant wasted energy, particularly when a robot’s legs need to make frequent contact with the ground in order to trot or gallop.
“In order to send a robot to find people or perform emergency tasks, like in the Fukushima disaster, you want it to be autonomous,” Kim says. “If it could run for more than two hours and search a large field, that would be useful. But one of the reasons why people think it’s impossible to make an electric robot that does this is because efficiencies have been pretty bad.”
Kim adds that part of the challenge in powering running machines with electric motors is that such robots require a flexible response upon impact, and high power, torque and efficiency — characteristics that have historically been difficult to achieve with electric motors.
To understand how an electrically powered system might waste little energy while running, the researchers first looked at general sources of energy loss in running robots. They found that most wasted energy comes from three sources: heat given off by a motor; energy dissipated through mechanical transmission, such as losses to friction through multiple gear trains; and inefficient control, such as energy lost through a heavy-footed step, as opposed to a smoother and more gentle gait.
The group then came up with design principles to minimize such energy waste. To combat heat loss from motors, the group proposed a high-torque-density motor — a motor that produces a significant amount of torque at a given weight and heat production. The team analyzed the relationship between motor size and torque, and designed custom motors that exceed the torque performance of commercially available electric motors.
The team found that such high-torque motors require fewer gears — a characteristic that would improve efficiency even more, as there would be less machinery through which energy could dissipate. Many researchers have used springs and dampers in series with motors to protect the robot from forceful impacts during locomotion, but it’s difficult to control a spring’s stiffness and damping ratio — which can be a problem if a robot has to traverse disparate surfaces, such as asphalt and sand.
“With our system, we can make our robotic leg behave like a spring or damper without having physical springs, dampers or force sensors,” Kim says.
Kim is the Esther and Harold E. Edgerton Assistant Professor in MIT’s Department of Mechanical Engineering. Photo: M. Scott Brauer
In addition to heat given off by a motor, the group found that another major source of energy loss comes from the force of impact as a robot’s leg hits the ground. Such forces can be strong enough to shake a machine and potentially cause damage. Engineers need to use dampers, or shock absorbers, to minimize shaking and stabilize such systems. But Kim says such dampers act to dissipate energy each time a leg meets the ground.
In contrast, the cheetah-bot’s electric motors capture this energy, feeding it back to the system to further power the robot.
“The majority of impact energy goes back to the battery because the damping is created by custom-designed electric control of the motor,” Kim says. “[The motor] regenerates energy that would have been lost.”
Kim adds that mounting motors and gears at the hip joint would also reduce energy loss by minimizing leg inertia: Some legged robots are designed with motors and gearboxes at each joint along a leg, which can be cumbersome and can lose more energy at every impact. With Kim’s design, 85 percent of the weight of the leg is concentrated at the hip joint, keeping the rest of the leg relatively lightweight.
The researchers also attached strips of Kevlar to connect sections of the robot’s legs, simulating the structure of tendons along a bone. The Kevlar strengthens the leg with little additional weight, and further reduces the leg’s inertia. The group also constructed a flexible spine out of rings of polyurethane rubber, sandwiched between vertebra-like segments. Kim hypothesizes that the spine moves along with the rear legs, and can store elastic energy while galloping.
To test the efficiency of the robot, the researchers ran it on a treadmill at a steady 5-mph clip. They measured the voltage and current of the battery, as well as that from each motor. They calculated the robot’s efficiency of locomotion — also known as cost of transport — and found that it was more efficient than robotic competitors such as Big Dog and Honda’s two-legged robot, ASIMO.
After digging through the literature on animal locomotion, the researchers plotted the cost of transport of various running, flying and swimming animals. They found that, not surprisingly, fliers were more efficient than runners, although swimmers were the most efficient movers. The cheetah robot, according to Kim’s calculations, falls around the efficiency range of humans, cheetahs and hunting dogs.
Currently the team is assembling a set of new motors, designed by Jeffrey Lang, a professor of electrical engineering at MIT. Kim expects that once the group outfits the robot with improved motors, the cheetah robot will be able to gallop at speeds of up to 35 mph, with an efficiency that rivals even fliers. The researchers are convinced that this approach can exceed biological muscle in many aspects, including power, torque and responsiveness.
“There are so many ways to design, and each legged robot has a different system,” Kim says. “If you design the motor properly, it’s more powerful, simpler robotics.”
Ron Fearing, a professor of electrical engineering and computer science at the University of California at Berkeley, says that simple springs can work well in small robots running on smooth terrain. But for rougher, more unpredictable terrain, he says the energy-recovery system of the MIT cheetah has big advantages.
“The cheetah robot has really pushed the technology in efficient motor design, low-loss transmissions, and low-inertia legs,” says Fearing, who did not contribute to the research. “By combining these with the regenerative motor drive system, so that mechanical energy from the leg can recharge the battery, that in my opinion has made a huge difference in efficiency, [and] an important step forward in making efficient, electrically driven running robots.”
In addition to Kim and Lang, the paper’s co-authors include Sangok Seok, Albert Wang, Meng Yee Chuah and David Otten, all of MIT.
Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
11-03-2013
Ook robots beschikken nu over hun eigen internet
Wanneer wij iets niet weten, zoeken we het op op het internet. En nu kunnen robots hetzelfde doen. Onderzoekers hebben een internet voor robots gecreëerd waar onze stalen vrienden informatie op kwijt kunnen en informatie af kunnen halen.
Robots komen we nu al op tal van plekken tegen. Een mooi voorbeeld zijn de robots die geheel zelfstandig ons huis stofzuigen. De robots zijn al tot heel wat in staat: zo weten ze precies welk stukje van het huis ze al gestofzuigd hebben en welk deel ze nog moeten doen. Ook niet onbelangrijk: de robotstofzuigers weten ook wanneer ze zich moeten opladen en doen dat vervolgens zelfstandig. Het is indrukwekkend, maar dit zijn eigenlijk nog maar hele simpele robots die simpele taken uitvoeren.
Intelligenter
In de toekomst willen onderzoeker robots gaan ontwikkelen die veel meer kunnen. Bijvoorbeeld robots die ons eten kunnen bereiden en het bij ons kunnen brengen. Maar hoe ingewikkelder de robot, hoe meer geheugen en computerkracht deze ook nodig heeft. Daarom zullen deze robots zwaar en duur zijn en niet zo snel op grote schaal geproduceerd en gebruikt gaan worden. Om dat te voorkomen, hebben onderzoekers nu een internet voor robots ontwikkeld.
In de cloud
Het internet heeft verschillende functies. Zo stelt het robots in staat om een deel van hun verwerkingsprocessen in de cloud te doen. Dat betekent dat ze lokaal niet meer zoveel geheugen nodig hebben en informatie toch supersnel (vaak zelfs sneller dan met een lokaal geheugen) kunnen verwerken.
Leren
Maar het internet biedt robots ook de gelegenheid om van elkaar te leren en informatie met elkaar te delen. Zo kan een robotstofzuiger bijvoorbeeld een kaart maken van de woonkamer die een andere robot vervolgens weer kan gebruiken wanneer deze door de kamer wandelt om zijn huisgenoten ontbijt te brengen. Robots hoeven dus niet elke keer opnieuw het wiel uit te vinden. In plaats daarvan bouwen ze op de informatie die hun ‘collega’s’ reeds hebben verzameld, zo stellen de onderzoekers in hun paper.
De onderzoekers verwachten dat robots dankzij hun eigen internet lichter, goedkoper en intelligenter worden. Ze hebben het internet voor robots de naam Rapyuta gegeven
(scientias.nl)
Ook robots beschikken nu over hun eigen internet

Wanneer wij iets niet weten, zoeken we het op op het internet. En nu kunnen robots hetzelfde doen. Onderzoekers hebben een internet voor robots gecreëerd waar onze stalen vrienden informatie op kwijt kunnen en informatie af kunnen halen.
Robots komen we nu al op tal van plekken tegen. Een mooi voorbeeld zijn de robots die geheel zelfstandig ons huis stofzuigen. De robots zijn al tot heel wat in staat: zo weten ze precies welk stukje van het huis ze al gestofzuigd hebben en welk deel ze nog moeten doen. Ook niet onbelangrijk: de robotstofzuigers weten ook wanneer ze zich moeten opladen en doen dat vervolgens zelfstandig. Het is indrukwekkend, maar dit zijn eigenlijk nog maar hele simpele robots die simpele taken uitvoeren.
Intelligenter
In de toekomst willen onderzoeker robots gaan ontwikkelen die veel meer kunnen. Bijvoorbeeld robots die ons eten kunnen bereiden en het bij ons kunnen brengen. Maar hoe ingewikkelder de robot, hoe meer geheugen en computerkracht deze ook nodig heeft. Daarom zullen deze robots zwaar en duur zijn en niet zo snel op grote schaal geproduceerd en gebruikt gaan worden. Om dat te voorkomen, hebben onderzoekers nu een internet voor robots ontwikkeld.
In de cloud
Het internet heeft verschillende functies. Zo stelt het robots in staat om een deel van hun verwerkingsprocessen in de cloud te doen. Dat betekent dat ze lokaal niet meer zoveel geheugen nodig hebben en informatie toch supersnel (vaak zelfs sneller dan met een lokaal geheugen) kunnen verwerken.
Leren
Maar het internet biedt robots ook de gelegenheid om van elkaar te leren en informatie met elkaar te delen. Zo kan een robotstofzuiger bijvoorbeeld een kaart maken van de woonkamer die een andere robot vervolgens weer kan gebruiken wanneer deze door de kamer wandelt om zijn huisgenoten ontbijt te brengen. Robots hoeven dus niet elke keer opnieuw het wiel uit te vinden. In plaats daarvan bouwen ze op de informatie die hun ‘collega’s’ reeds hebben verzameld, zo stellen de onderzoekers in hun paper.
De onderzoekers verwachten dat robots dankzij hun eigen internet lichter, goedkoper en intelligenter worden. Ze hebben het internet voor robots de naam Rapyuta gegeven

(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

De professor die min of meer de leiding heeft over dit project krijgt soms van die mailtjes van die gekken die denken dat we skynet aan het oprichten zijn en bedreigen hem danquote:
11-03-2013
Ook robots beschikken nu over hun eigen internet
[ afbeelding ]
Wanneer wij iets niet weten, zoeken we het op op het internet. En nu kunnen robots hetzelfde doen. Onderzoekers hebben een internet voor robots gecreëerd waar onze stalen vrienden informatie op kwijt kunnen en informatie af kunnen halen.
Robots komen we nu al op tal van plekken tegen. Een mooi voorbeeld zijn de robots die geheel zelfstandig ons huis stofzuigen. De robots zijn al tot heel wat in staat: zo weten ze precies welk stukje van het huis ze al gestofzuigd hebben en welk deel ze nog moeten doen. Ook niet onbelangrijk: de robotstofzuigers weten ook wanneer ze zich moeten opladen en doen dat vervolgens zelfstandig. Het is indrukwekkend, maar dit zijn eigenlijk nog maar hele simpele robots die simpele taken uitvoeren.
Intelligenter
In de toekomst willen onderzoeker robots gaan ontwikkelen die veel meer kunnen. Bijvoorbeeld robots die ons eten kunnen bereiden en het bij ons kunnen brengen. Maar hoe ingewikkelder de robot, hoe meer geheugen en computerkracht deze ook nodig heeft. Daarom zullen deze robots zwaar en duur zijn en niet zo snel op grote schaal geproduceerd en gebruikt gaan worden. Om dat te voorkomen, hebben onderzoekers nu een internet voor robots ontwikkeld.
In de cloud
Het internet heeft verschillende functies. Zo stelt het robots in staat om een deel van hun verwerkingsprocessen in de cloud te doen. Dat betekent dat ze lokaal niet meer zoveel geheugen nodig hebben en informatie toch supersnel (vaak zelfs sneller dan met een lokaal geheugen) kunnen verwerken.
Leren
Maar het internet biedt robots ook de gelegenheid om van elkaar te leren en informatie met elkaar te delen. Zo kan een robotstofzuiger bijvoorbeeld een kaart maken van de woonkamer die een andere robot vervolgens weer kan gebruiken wanneer deze door de kamer wandelt om zijn huisgenoten ontbijt te brengen. Robots hoeven dus niet elke keer opnieuw het wiel uit te vinden. In plaats daarvan bouwen ze op de informatie die hun ‘collega’s’ reeds hebben verzameld, zo stellen de onderzoekers in hun paper.
De onderzoekers verwachten dat robots dankzij hun eigen internet lichter, goedkoper en intelligenter worden. Ze hebben het internet voor robots de naam Rapyuta gegeven
(scientias.nl)
Simpele zielen zijn dat. Blijft bizar hoeveel invloed een film kan hebben.quote:Op woensdag 13 maart 2013 23:47 schreef Dale. het volgende:
[..]
De professor die min of meer de leiding heeft over dit project krijgt soms van die mailtjes van die gekken die denken dat we skynet aan het oprichten zijn en bedreigen hem dan
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
16-03-2013
Shell experimenteert met scholen robotvisjes
De onderwaterwereld in de Golf van Mexico zal dit jaar worden opgeschrikt door scholen robotvisjes. Shell test de potentie van autonoom opererende minionderzeeërs, uitgerust met seismische sensoren, in de zoektocht naar nieuwe olie- en gasvelden.
Nu nog gaat seismisch onderzoek op zee met schepen die kilometerslange meetkabels achter zich aanslepen. Het schip zendt met een luchtkanon akoestische signalen uit en microfoons in de meetkabels nemen het teruggekaatste signaal op. Aan de hand van het patroon van uitdoving onder verschillende hoeken van terugkaatsing is te bepalen wat zich in de ondergrond bevindt.
Het proces zou veel gemakkelijker verlopen zonder de polsdikke sleepkabels, die tientallen tonnen wegen. Shell investeerde daarom in de techniek van het Britse bedrijf Go Science, dat een efficiënt opererende school onderwaterrobots ontwierp.
Honderden, of zelfs duizenden robotjes navigeren ieder naar hun eigen plek op de zeebodem en vormen samen een sensornetwerk. Onder water communiceren de robots alleen met elkaar en enkele zogenaamde surface nodes, die aan het wateroppervlak blijven en gps-signalen (die niet onder water doordringen) omzetten in sonar. Als het moederschip zijn luchtkanon afvuurt, nemen de robotvisjes de uit de ondergrond teruggekaatste geluidssignalen op en slaan deze data op. Ze kunnen meerdere keren van positie wisselen, voor ze terug moeten naar het moederschip, waar de data worden uitgelezen.
Volgens Go Science halveert de techniek de duur en de kosten van onderzeese seismische expedities. Bovendien kan het onderzoek nu onder ijs plaatsvinden, wat beter seismisch onderzoek in het poolgebied mogelijk maakt.
De techniek zorgt ook voor nieuwe uitdagingen, vertelt Wim Walk, hoofd van de afdeling Novel Geophysical Measurement Technologies in het huisblad Shell Venster. ‘De snelheidswinst betekent óók dat er meer schepen nodig zijn en meer airguns die je simultaan moet afschieten. Dat levert een nieuwe it-uitdaging op, want om mogelijke interferentie van signalen tegen te gaan, heb je complexere software en scheidingsfilters nodig.’
(technisckweekblad.nl)
Shell experimenteert met scholen robotvisjes

De onderwaterwereld in de Golf van Mexico zal dit jaar worden opgeschrikt door scholen robotvisjes. Shell test de potentie van autonoom opererende minionderzeeërs, uitgerust met seismische sensoren, in de zoektocht naar nieuwe olie- en gasvelden.
Nu nog gaat seismisch onderzoek op zee met schepen die kilometerslange meetkabels achter zich aanslepen. Het schip zendt met een luchtkanon akoestische signalen uit en microfoons in de meetkabels nemen het teruggekaatste signaal op. Aan de hand van het patroon van uitdoving onder verschillende hoeken van terugkaatsing is te bepalen wat zich in de ondergrond bevindt.
Het proces zou veel gemakkelijker verlopen zonder de polsdikke sleepkabels, die tientallen tonnen wegen. Shell investeerde daarom in de techniek van het Britse bedrijf Go Science, dat een efficiënt opererende school onderwaterrobots ontwierp.
Honderden, of zelfs duizenden robotjes navigeren ieder naar hun eigen plek op de zeebodem en vormen samen een sensornetwerk. Onder water communiceren de robots alleen met elkaar en enkele zogenaamde surface nodes, die aan het wateroppervlak blijven en gps-signalen (die niet onder water doordringen) omzetten in sonar. Als het moederschip zijn luchtkanon afvuurt, nemen de robotvisjes de uit de ondergrond teruggekaatste geluidssignalen op en slaan deze data op. Ze kunnen meerdere keren van positie wisselen, voor ze terug moeten naar het moederschip, waar de data worden uitgelezen.
Volgens Go Science halveert de techniek de duur en de kosten van onderzeese seismische expedities. Bovendien kan het onderzoek nu onder ijs plaatsvinden, wat beter seismisch onderzoek in het poolgebied mogelijk maakt.
De techniek zorgt ook voor nieuwe uitdagingen, vertelt Wim Walk, hoofd van de afdeling Novel Geophysical Measurement Technologies in het huisblad Shell Venster. ‘De snelheidswinst betekent óók dat er meer schepen nodig zijn en meer airguns die je simultaan moet afschieten. Dat levert een nieuwe it-uitdaging op, want om mogelijke interferentie van signalen tegen te gaan, heb je complexere software en scheidingsfilters nodig.’
(technisckweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

libelle-copter

Geld maakt meer kapot dan je lief is.
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
Het zijn sterke ruggen die vrijheid en weelde kunnen dragen
31-03-2013
Minirobots tonen aan hoe 'oerdomme' mieren weg vinden in ingewikkeld nest
© thinkstock.
Wetenschappers hebben minirobots ontwikkeld om het koloniegedrag van mieren te imiteren. Ze willen zo onderzoeken hoe de insecten hun weg vinden in een nest, meldt Tweakers.net.
Mierennesten bestaan namelijk uit een uitgebreid stelsel van gangen waarin mieren zich zowel verticaal als horizontaal moeten oriënteren. De dieren hebben echter nauwelijks hersencapaciteit, maar navigeren met de hulp van feromonen. Dat zijn signaalstoffen die het lichaam afscheidt, vergelijkbaar met hormonen.
Onderzoekers uit het Amerikaanse Newark en het Franse Toulouse hebben samen een robotsysteem ontwikkeld dat het gedrag van mieren imiteert. De minirobots, zo groot als een suikerklontje, gebruiken lichtpatronen in plaats van feromonen die opgepikt kunnen worden met twee sensoren.
Lichtspoor
In een experiment werden de minirobots zo ingesteld dat ze een lichtspoor volgden wanneer ze dat tegenkwamen. Er bleken geen verdere programmeertrucs nodig om de minirobots hun weg te laten vinden in een gangenstelsel, vergelijkbaar met de wijze waarop een mierenkolonie werkt.
Volgens de wetenschappers toont hun systeem aan dat mieren met minimale hersencapaciteit hun weg kunnen vinden in een ingewikkeld gangenstelsel. Hoewel het onderzoek niet direct praktische implicaties heeft, wordt vaak naar de natuur gekeken om systemen te optimaliseren.
(HLN)
Minirobots tonen aan hoe 'oerdomme' mieren weg vinden in ingewikkeld nest

© thinkstock.
Wetenschappers hebben minirobots ontwikkeld om het koloniegedrag van mieren te imiteren. Ze willen zo onderzoeken hoe de insecten hun weg vinden in een nest, meldt Tweakers.net.
Mierennesten bestaan namelijk uit een uitgebreid stelsel van gangen waarin mieren zich zowel verticaal als horizontaal moeten oriënteren. De dieren hebben echter nauwelijks hersencapaciteit, maar navigeren met de hulp van feromonen. Dat zijn signaalstoffen die het lichaam afscheidt, vergelijkbaar met hormonen.
Onderzoekers uit het Amerikaanse Newark en het Franse Toulouse hebben samen een robotsysteem ontwikkeld dat het gedrag van mieren imiteert. De minirobots, zo groot als een suikerklontje, gebruiken lichtpatronen in plaats van feromonen die opgepikt kunnen worden met twee sensoren.
Lichtspoor
In een experiment werden de minirobots zo ingesteld dat ze een lichtspoor volgden wanneer ze dat tegenkwamen. Er bleken geen verdere programmeertrucs nodig om de minirobots hun weg te laten vinden in een gangenstelsel, vergelijkbaar met de wijze waarop een mierenkolonie werkt.
Volgens de wetenschappers toont hun systeem aan dat mieren met minimale hersencapaciteit hun weg kunnen vinden in een ingewikkeld gangenstelsel. Hoewel het onderzoek niet direct praktische implicaties heeft, wordt vaak naar de natuur gekeken om systemen te optimaliseren.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
31-03-2013quote:
Robot vliegt zoals libelle
Het Duitse bedrijf Festo heeft een robot gemaakt die vliegt als een libelle. De BionicOpter kan in alle richtingen bewegen, en ook stilhangen in de lucht. Dat is een hele prestatie, want de vliegbewegingen van libelles zijn erg complex.
Het is mogelijk de libelle te besturen met een smartphone, al stuurt de robot dan zelf bij waar nodig. Elke vleugel, het hoofd en de staart worden door de processor apart aangestuurd, meldt Tweakers.net.
Het robotdiertje weegt 175 gram en heeft een lichaamslengte van 48 cm. De vleugels bestaan uit een frame van koolstofvezels met een dunne folie van plastic. In de ribbenkast bevindt zich een accu, negen stappenmotoren en een ARM-microcontroller met sensoren en draadloze modules. Het is niet bekendgemaakt hoe lang de accu meegaat.
Vermoedelijk gaat de robot niet verkocht worden omdat hij werd ontwikkeld in het kader van het Bionic Learning Network-programma van het bedrijf. Eerder maakte Festo al een robotversie van onder andere een vogel, een olifantenslurf en een vliegende pinguin.
(HLN)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
02-04-2013
robot krijgt armen en handen
De Duitse humanoïde robot TORO (TOrque controlled humanoid Robot), heeft armen en handen gekregen.
TORO heeft armen en handen (Copyright: DLR)
De robot begon in 2009 als twee benen met hier bovenop een camera gemonteerd, maar is door de jaren steeds verder uitgegroeid. Eerder kreeg TORO ook al een bovenlichaam en een hoofd met daarin camera-ogen.
TORO is een looprobot van het DLR die onderzoekers inzicht moet geven in hoe deze technologie verder te ontwikkelen. De robot is niet erg snel; bijzonder is juist dat TORO opmerkelijk kleine voeten heeft. Dit maakt de looprobot minder stabiel, wat het lopen moeilijker maakt, maar volgens de onderzoekers kan TORO hierdoor gemakkelijk over obstakels heen klimmen. De toevoeging van een bovenlichaam, een hoofd en armen maken het lopen echter een nog grotere uitdaging voor de robot.
De onderzoekers willen TORO niet gebruiken om hem bepaalde taken aan te leren, wat bij dergelijke robots meestal wel het geval is, maar ze willen dat hun looprobot zich vooral leert bewijzen door meteen uit de voeten te kunnen in een onbekende omgeving. Flexibele gewrichten en sensoren in armen en handen moeten nieuwe inzichten opleveren.
Looprobot TORO is compleet. (Copyright: DLR)
Met zijn nieuwe armen en handen moet TORO ook andere proeven uit gaan voeren waarbij processen die mensen vaak onbewust doen in kaart worden gebracht. ‘Als personen bijvoorbeeld een zware deur openen, dan doen ze dat in een dynamisch proces’, vertelt DLR-medewerker Christian Ott. ‘Ze weten onbewust welke bewegingen er nodig zijn. Onze robot zou dit ook moeten kunnen.’ Om hier achter te komen, heeft TORO onder meer een sensor in de romp, die registreert hoe de versnelling en rotatiesnelheid van het bovenlichaam zijn bij een dergelijke actie. Ook moet TORO leren traplopen, waarbij de robot zichzelf vasthoudt aan de trapleuning.
(technischweekblad.nl)
robot krijgt armen en handen
De Duitse humanoïde robot TORO (TOrque controlled humanoid Robot), heeft armen en handen gekregen.

TORO heeft armen en handen (Copyright: DLR)
De robot begon in 2009 als twee benen met hier bovenop een camera gemonteerd, maar is door de jaren steeds verder uitgegroeid. Eerder kreeg TORO ook al een bovenlichaam en een hoofd met daarin camera-ogen.
TORO is een looprobot van het DLR die onderzoekers inzicht moet geven in hoe deze technologie verder te ontwikkelen. De robot is niet erg snel; bijzonder is juist dat TORO opmerkelijk kleine voeten heeft. Dit maakt de looprobot minder stabiel, wat het lopen moeilijker maakt, maar volgens de onderzoekers kan TORO hierdoor gemakkelijk over obstakels heen klimmen. De toevoeging van een bovenlichaam, een hoofd en armen maken het lopen echter een nog grotere uitdaging voor de robot.
De onderzoekers willen TORO niet gebruiken om hem bepaalde taken aan te leren, wat bij dergelijke robots meestal wel het geval is, maar ze willen dat hun looprobot zich vooral leert bewijzen door meteen uit de voeten te kunnen in een onbekende omgeving. Flexibele gewrichten en sensoren in armen en handen moeten nieuwe inzichten opleveren.

Looprobot TORO is compleet. (Copyright: DLR)
Met zijn nieuwe armen en handen moet TORO ook andere proeven uit gaan voeren waarbij processen die mensen vaak onbewust doen in kaart worden gebracht. ‘Als personen bijvoorbeeld een zware deur openen, dan doen ze dat in een dynamisch proces’, vertelt DLR-medewerker Christian Ott. ‘Ze weten onbewust welke bewegingen er nodig zijn. Onze robot zou dit ook moeten kunnen.’ Om hier achter te komen, heeft TORO onder meer een sensor in de romp, die registreert hoe de versnelling en rotatiesnelheid van het bovenlichaam zijn bij een dergelijke actie. Ook moet TORO leren traplopen, waarbij de robot zichzelf vasthoudt aan de trapleuning.
(technischweekblad.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...

Wow! Creepy! Maar wat een vooruitgang weer ten opzichte van de vorige versie.quote:
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!

Even een mooi artikeltje wat ik wil delen:
quote:
The difference between people and machine will blur as we trek through the decades ahead.
As we move into the late 2030s and 2040s, the most salient scenario is that we will merge with our technology gradually, not overnight. We may not experience a single great leap like a “Singularity;” instead, we could see many small steps as we slowly become more machine-like.
AI/Robots will eventually surpass human levels of intelligence and develop ability to self-replicate, increasing intelligence with each succeeding generation. This will produce an information explosion almost beyond imagination.
Our bodies will also evolve during this time. We will use nanobots to kill pathogens and cancer cells, then go into our brain and do benign things like enhance memory. Slowly, these nanobots will become more sophisticated.
We will direct these ‘smart bots’ to convert biological neurons into powerful non-biological ones, and rewrite our brain’s ‘software’. This will allow us to connect with machines and share their super-intelligence.
Eventually, every cell in our body will become non-biological, and our silicon-based minds will not only be able to interface seamlessly with machines, but will also easily connect with one another utilizing thought communications.
As robots develop new abilities, we will incorporate those abilities into our makeup. As the years unfold, we will become more machine-like and robots more human-like, the difference between human and machine will blur.
By century’s end, the merge could be complete; we would become a single species. And although our minds and bodies will be considered non-biological, our consciousness will forever preserve our definition as a human being.
The journey into this human-machine future will take place one benign, safe change at a time, beginning in late 2030s and ending sometime during the last half of this century.
Are you ready to live in a ‘cyborg’ world? I’ll admit it would certainly take some getting used to, but should this octogenarian writer survive the decades ahead; I say welcome to our human-machine future!

I only tell you once. Don't fuck me, Tony. Don't you ever try to fuck me.
^ Het is altijd fascinerend om zulke toekomstbeelden voor je te zien. Helemaal als je verder gaat denken. Stel de mens is idd half robot ergens rond 2060. Hoe ziet de wereld er dan uit in 2100? En dan in 2200? 3000? 6000? Dat is niet voor te stellen. Is dit misschien de laatste eeuw waarin 'de normale mens' nog bestaat? Als de ontwikkelingen echt altijd exponentieel blijven gaan. Ze we dan compleet uit ontwikkeld in, zeg, het jaar 10.000?
Ik denk dus dat een beschaving op een gegeven moment aan zijn einde komt. Niet eens door een ramp ofzo maar gewoon...Als je nagaat dat de dino's miljoenen jaren leefde, dan kan ik me niet voorstellen in wat voor stadium een intelligente beschaving zou zijn na zo'n periode.
Onsterfelijkheid, ruimteschepen, teleportatie, het kunnen maken van materie en leven...zijn allemaal zaken die ik me voorstel voor het jaar 3000 bijvoorbeeld. Daarna houdt mijn fantasie gewoon op, laat staan wat er in het jaar 10.000 gebeurd...
[ Bericht 12% gewijzigd door Eyjafjallajoekull op 08-04-2013 12:10:21 ]
Ik denk dus dat een beschaving op een gegeven moment aan zijn einde komt. Niet eens door een ramp ofzo maar gewoon...Als je nagaat dat de dino's miljoenen jaren leefde, dan kan ik me niet voorstellen in wat voor stadium een intelligente beschaving zou zijn na zo'n periode.
Onsterfelijkheid, ruimteschepen, teleportatie, het kunnen maken van materie en leven...zijn allemaal zaken die ik me voorstel voor het jaar 3000 bijvoorbeeld. Daarna houdt mijn fantasie gewoon op, laat staan wat er in het jaar 10.000 gebeurd...
[ Bericht 12% gewijzigd door Eyjafjallajoekull op 08-04-2013 12:10:21 ]
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
De komende tientallen jaren worden super interessant. Ik denk dat wij onszelf met kunstmatige intelligentie intelligenter gaan maken en met deze hogere intelligentie kunnen wij ons dingen verbeelden en mogelijkheden zien waar wij nu nooit op zouden komen. Wat ben ik blij dat ik nog jong ben.quote:
^ Het is altijd fascinerend om zulke toekomstbeelden voor je te zien. Helemaal als je verder gaat denken. Stel de mens is idd half robot ergens rond 2060. Hoe ziet de wereld er dan uit in 2100? En dan in 2200? 3000? 6000? Dat is niet voor te stellen. Is dit misschien de laatste eeuw waarin 'de normale mens' nog bestaat? Als de ontwikkelingen echt altijd exponentieel blijven gaan. Ze we dan compleet uit ontwikkeld in, zeg, het jaar 10.000?
Ik denk dus dat een beschaving op een gegeven moment aan zijn einde komt. Niet eens door een ramp ofzo maar gewoon...Als je nagaat dat de dino's miljoenen jaren leefde, dan kan ik me niet voorstellen in wat voor stadium een intelligente beschaving zou zijn na zo'n periode.
Onsterfelijkheid, ruimteschepen, teleportatie, het kunnen maken van materie en leven...zijn allemaal zaken die ik me voorstel voor het jaar 3000 bijvoorbeeld. Daarna houdt mijn fantasie gewoon op, laat staan wat er in het jaar 10.000 gebeurd...
Dat verhaaltje klinkt heel leuk maar is echt totale larie koek, duidelijk geschreven door iemand zonder echte kennis van zaken en alleen de headlines volgt lijkt het. Naar mijn mening mogen wij echt blij zijn als wij bijvoorbeeld in 2050 een potje voetbal kunnen spelen tegen echte voetballers laat staan het WK winnen zoals het Robocup als visie heeft. Hoewel het AI gedeelte daarbij waarschijnlijk veel minder interessant is, maar meer het mechanische
Echte AI bestaat hedendaags nog niet. Veel mensen vinden wat neurale netwerken gecombineerd met iteratieve learning methods of reinforcement learning en state machientjes al AI maar het is gewoon fake eigenlijk. Wij programeren nog steeds wat de robot moet doen. We geven programeren het alleen abstracter aan wat hij moet doen.
Maar ook qua mechanica moeten veel stappen gezet worden. Motoren moeten bv. veel kleiner gemaakt worden zodat het design van zo'n robot veel flexiebeler gemaakt kan worden en dus veel meer vrijheidsgraden heeft dan de huidige generatie maar tegelijkertijd moeten deze ook weer immense kracht kunnen leveren. Deze twee dingen, klein + veel kracht werken elkaar gewoon ontzettend tegen.
Echte AI bestaat hedendaags nog niet. Veel mensen vinden wat neurale netwerken gecombineerd met iteratieve learning methods of reinforcement learning en state machientjes al AI maar het is gewoon fake eigenlijk. Wij programeren nog steeds wat de robot moet doen. We geven programeren het alleen abstracter aan wat hij moet doen.
Maar ook qua mechanica moeten veel stappen gezet worden. Motoren moeten bv. veel kleiner gemaakt worden zodat het design van zo'n robot veel flexiebeler gemaakt kan worden en dus veel meer vrijheidsgraden heeft dan de huidige generatie maar tegelijkertijd moeten deze ook weer immense kracht kunnen leveren. Deze twee dingen, klein + veel kracht werken elkaar gewoon ontzettend tegen.
Wauw, het is totale lariekoek.... Dat is nogal een stellige uitspraak, die je vervolgens nogal karig onderbouwt.quote:
Dat verhaaltje klinkt heel leuk maar is echt totale larie koek, duidelijk geschreven door iemand zonder echte kennis van zaken en alleen de headlines volgt lijkt het. Naar mijn mening mogen wij echt blij zijn als wij bijvoorbeeld in 2050 een potje voetbal kunnen spelen tegen echte voetballers laat staan het WK winnen zoals het Robocup als visie heeft. Hoewel het AI gedeelte daarbij waarschijnlijk veel minder interessant is, maar meer het mechanische
Echte AI bestaat hedendaags nog niet. Veel mensen vinden wat neurale netwerken gecombineerd met iteratieve learning methods of reinforcement learning en state machientjes al AI maar het is gewoon fake eigenlijk. Wij programeren nog steeds wat de robot moet doen. We geven programeren het alleen abstracter aan wat hij moet doen.
Maar ook qua mechanica moeten veel stappen gezet worden. Motoren moeten bv. veel kleiner gemaakt worden zodat het design van zo'n robot veel flexiebeler gemaakt kan worden en dus veel meer vrijheidsgraden heeft dan de huidige generatie maar tegelijkertijd moeten deze ook weer immense kracht kunnen leveren. Deze twee dingen, klein + veel kracht werken elkaar gewoon ontzettend tegen.
Ik neem Ray Kurzweil, die in principe hetzelfde zegt, toch een stuk serieuzer dan iemand die niet eens weet hoe je programmeren en flexibeler spelt.
"An educated citizenry is a vital requisite for our survival as a free people."
Ik zou het geen lariekoek noemen.
Of de AI fake is of niet... dat is een hele andere discussie dan robotica. In mijn ogen is reinforcement learning pure AI; mensen leren ook dingen met vallen en opstaan. Natuurlijk worden een aantal dingen geprogrammeerd in de robot, maar jij en ik zijn ook door onze ouders gemaakt. Ik zou het geen reinforcement learning noemen als letterlijk alles is geprogrammeerd.
Ik denk zelf dat 2050 nog te dichtbij is voor volwaardig robotvoetbal. AI op zo'n grote en complexe schaal ligt nog niet voorhanden.
Of de AI fake is of niet... dat is een hele andere discussie dan robotica. In mijn ogen is reinforcement learning pure AI; mensen leren ook dingen met vallen en opstaan. Natuurlijk worden een aantal dingen geprogrammeerd in de robot, maar jij en ik zijn ook door onze ouders gemaakt. Ik zou het geen reinforcement learning noemen als letterlijk alles is geprogrammeerd.
Ik denk zelf dat 2050 nog te dichtbij is voor volwaardig robotvoetbal. AI op zo'n grote en complexe schaal ligt nog niet voorhanden.
Praten we in 2050 verder. Ik werk dagelijks met robots op de universiteit en doe ondermeer onderzoek naar machine learning en robotica voor robot earth waar ik in dit topic al eerder over berichte. Dit en de bijbehorende theorie die niet eens compleet is zo complex dat t, denk ik, echt niet er dan al is.quote:
[..]
Wauw, het is totale lariekoek.... Dat is nogal een stellige uitspraak, die je vervolgens nogal karig onderbouwt.
Ik neem Ray Kurzweil, die in principe hetzelfde zegt, toch een stuk serieuzer dan iemand die niet eens weet hoe je programmeren en flexibeler spelt.
Daarnaast nanobots klinkt leuk maar je hebt nog steeds te maken met t menselijk lichaam dat ze ook gewoon kan verstoten. Laten we eerst een nanobot maken die zich door het gehele bloedstelsel kan verplaatsen op commando en dan verder kijken.
Sowieso is t hele nanobots gedoe puur futuristisch gedoe opgepikt van films. Maar ach... Van wat ik lees van Ray Kurzweil is het ook een futurist; die mensen hebben het heeeeeel vaak fout en een aantal van hen hebben het heeeeel soms goed. Sommige dingen zullen best mogelijk zijn maar zeker niet in t tijdsbestek wat hij noemt. Daarnaast klinkt t vanuit mijn invalshoek ook te sciencefiction achtig.
Mensen denken graag dat we altijd technisch zullen blijven evolueren (en dat het onmogelijke, mogelijk is) net zoals heel veel mensen denken dat de wetenschap met een GOED antwoord komt op het energie probleem. Het tegenovergestelde is echter waar.
Ikzelf geloof er ook niet in dat we ooit echte AI kunnen creeëren een robot zal altijd kennis uitputten van wat hij ergens heeft opgepikt en dus in zij database heeft staan, bv. als de robot gelooft in Sinterklaas zal hij er altijd erin blijven geloven en niet denken of op de vraag komen: zou Sinterklaas misschien een bedrieger zijn? Tenzij het ergens oppikt.
Bij reinforcement learning tuned hij enkel de parameters waarmee hij de motoren moet aansturen om te lopen hé... Dat hij moet gaan lopen en hoe lopen 'gedefinieerd' is, als in niet omvallen en vooruitbewegen, staat gewoon geprogrammeerd in zijn geheugen. Het is eigenlijk gewoon bruteforcing. Kijken hoe de robot reageert op bepaalde parameters en dan op een slimme manier door naar de error signaal en model te kijken hoe je nieuwe slimmere/betere parameters kunt kiezen.quote:
Ik zou het geen reinforcement learning noemen als letterlijk alles is geprogrammeerd.
[ Bericht 17% gewijzigd door Dale. op 09-04-2013 11:44:18 ]
Ik studeer nu af voor mijn Master AI, en mijn onderzoeksproject heeft te maken met reinforcement learning.quote:
Bij reinforcement learning tuned hij enkel de parameters waarmee hij de motoren moet aansturen om te lopen hé... Dat hij moet gaan lopen en hoe lopen 'gedefinieerd' is, als in niet omvallen en vooruitbewegen, staat gewoon geprogrammeerd in zijn geheugen. Het is eigenlijk gewoon bruteforcing. Kijken hoe de robot reageert op bepaalde parameters en dan op een slimme manier door naar de error signaal en model te kijken hoe je nieuwe slimmere/betere parameters kunt kiezen.
Ik ben ook geen fan van Ray Kurzweil. Het voelt soms alsof ie leukraak dingen schreeuwt en dat de media maar al te gretig het overneemt.. want kijk..terminator wordt in reality in 2050..!
Wat ik wel denk is dat jij en ik een andere definitie van 'AI' hebben. Ik vind AI al 'intelligent' als het zelf iets kan vinden. Dat we dan vervolgens gewoon het probleem zelf opstellen en beschrijven hoe parameters een oplossing formuleert voor het probleem... dat hoort er gewoon bij.
Het grappige is dat mensen IN het werkveld vaak een tunnelvisie krijgen op den duur met weinig fantasie.
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Ik begon ook met dromen van mijn eigen bedrijf dat dienstverlening doet dmv een paar AI algoritmes. Naarmate je meer snapt, realiseer je gewoon goed hoeveel je moet doen en dat het vele dingen nog niet echt zijn behandeld...quote:
Het grappige is dat mensen IN het werkveld vaak een tunnelvisie krijgen op den duur met weinig fantasie.
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Merk het zelf ook ja. Helaas.... Je moet heel erg uitkijken dat je niet steeds verder in een tunnel gaat zitten want op een gegeven moment wordt je een cynische ouwe zakquote:
[..]
Ik begon ook met dromen van mijn eigen bedrijf dat dienstverlening doet dmv een paar AI algoritmes. Naarmate je meer snapt, realiseer je gewoon goed hoeveel je moet doen en dat het vele dingen nog niet echt zijn behandeld...
Opgeblazen gevoel of winderigheid? Zo opgelost met Rennie!
Ja iddquote:
Het grappige is dat mensen IN het werkveld vaak een tunnelvisie krijgen op den duur met weinig fantasie.
Ik merk dat ook in de ICT/digitale creatieve sector. Veel mensen zijn best wel vastgeroest en conservatief in een bepaald opzicht. Ook op Tweakers.net zie je heel duidelijk dat heel veel mensen enorm conservatief zijn geworden door de jaren heen. Mensen die vroeger aan de voorhoede stonden van computers en technologie...
Jack Andraka is daar een mooi voorbeeld van. Een 15-jarige die nog "niet wist wat grote bedrijven wel zogenaamd wisten" en daarom in staat was te komen tot een enorme doorbraak in de strijd tegen kanker:
Jack Andraka — 15-Year-Old Invents Cancer Test 100 Times More Sensitive & 26,000 Times Cheaper than Current Tests
http://www.bradaronson.com/jack-andraka/
"An educated citizenry is a vital requisite for our survival as a free people."
18-04-2013
Nieuwe robot helpt uw IKEA-meubel in elkaar te zetten
Het is altijd een hele beproeving: de meubels van een Zweedse meubelwarengigant in elkaar zetten. Wetenschappers hebben nu een robot ontwikkeld die een handje kan helpen. De robot is niet geprogrammeerd om dat te doen, maar leert het gaandeweg.
Een robot die een handje helpt bij het in elkaar zetten van meubels: dat is handig! Maar het heeft weinig zin om de robot voor elk stukje van de vele meubels die het Zweedse meubelhuis in het assortiment heeft, een handeling te leren. Daarom hebben de onderzoekers een robot ontwikkeld die leert door middel van demonstraties.
“Eén gebruiker grijpt de robot en beweegt deze om te demonstreren hoe deze met de andere gebruiker zou moeten samenwerken,” zo leggen de onderzoekers uit. Met behulp van sensoren en camera’s kan de robot ‘voelen’ en ‘zien’ wat hij doet. “Na de demonstratie leert de robot dat deze eerst meegaand moet zijn, zodat de gebruiker het tafelblad neer kan leggen om de poten erop te schroeven.” Zodra de gebruiker de poot vast gaat schroeven, is de robot niet langer meegaand, maar houdt hij het tafelblad stevig vast (zie onderstaand filmpje).
Het idee van een robot die leert door demonstratie is niet helemaal nieuw. Zo heeft deze robot bijvoorbeeld leren tafeltennissen door naar mensen te kijken. Maar de robot die mensen assisteert bij het in elkaar zetten van meubels is toch bijzonder. Mede omdat hij zo goed is ingespeeld op de mens, waardoor de samenwerking heel natuurlijk en efficiënt verloopt.
(scientias.nl)
Nieuwe robot helpt uw IKEA-meubel in elkaar te zetten

Het is altijd een hele beproeving: de meubels van een Zweedse meubelwarengigant in elkaar zetten. Wetenschappers hebben nu een robot ontwikkeld die een handje kan helpen. De robot is niet geprogrammeerd om dat te doen, maar leert het gaandeweg.
Een robot die een handje helpt bij het in elkaar zetten van meubels: dat is handig! Maar het heeft weinig zin om de robot voor elk stukje van de vele meubels die het Zweedse meubelhuis in het assortiment heeft, een handeling te leren. Daarom hebben de onderzoekers een robot ontwikkeld die leert door middel van demonstraties.
“Eén gebruiker grijpt de robot en beweegt deze om te demonstreren hoe deze met de andere gebruiker zou moeten samenwerken,” zo leggen de onderzoekers uit. Met behulp van sensoren en camera’s kan de robot ‘voelen’ en ‘zien’ wat hij doet. “Na de demonstratie leert de robot dat deze eerst meegaand moet zijn, zodat de gebruiker het tafelblad neer kan leggen om de poten erop te schroeven.” Zodra de gebruiker de poot vast gaat schroeven, is de robot niet langer meegaand, maar houdt hij het tafelblad stevig vast (zie onderstaand filmpje).

Het idee van een robot die leert door demonstratie is niet helemaal nieuw. Zo heeft deze robot bijvoorbeeld leren tafeltennissen door naar mensen te kijken. Maar de robot die mensen assisteert bij het in elkaar zetten van meubels is toch bijzonder. Mede omdat hij zo goed is ingespeeld op de mens, waardoor de samenwerking heel natuurlijk en efficiënt verloopt.
(scientias.nl)
Death Makes Angels of us all
And gives us wings where we had shoulders
Smooth as raven' s claws...
And gives us wings where we had shoulders
Smooth as raven' s claws...
Hey dit moet ik ff een vriendin van me tuippen
Die is op dit moment aan t promoveren op robotica, een zorgrobot!
Die is op dit moment aan t promoveren op robotica, een zorgrobot!
L'Amour menaçant:
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
Qui que tu sois, voici ton maître. Il l'est, le fût ou le doit être.
TU/e?quote:
Hey dit moet ik ff een vriendin van me tuippen
Die is op dit moment aan t promoveren op robotica, een zorgrobot!